Motion of System of Particles and Rigid Bodies | Physics - Long Questions and Answer | 11th Physics : UNIT 5 : Motion of System of Particles and Rigid Bodies
Chapter: 11th Physics : UNIT 5 : Motion of System of Particles and Rigid Bodies
Long Questions and Answer
Motion of System of Particles and Rigid Bodies (Physics)
Long Answer Questions
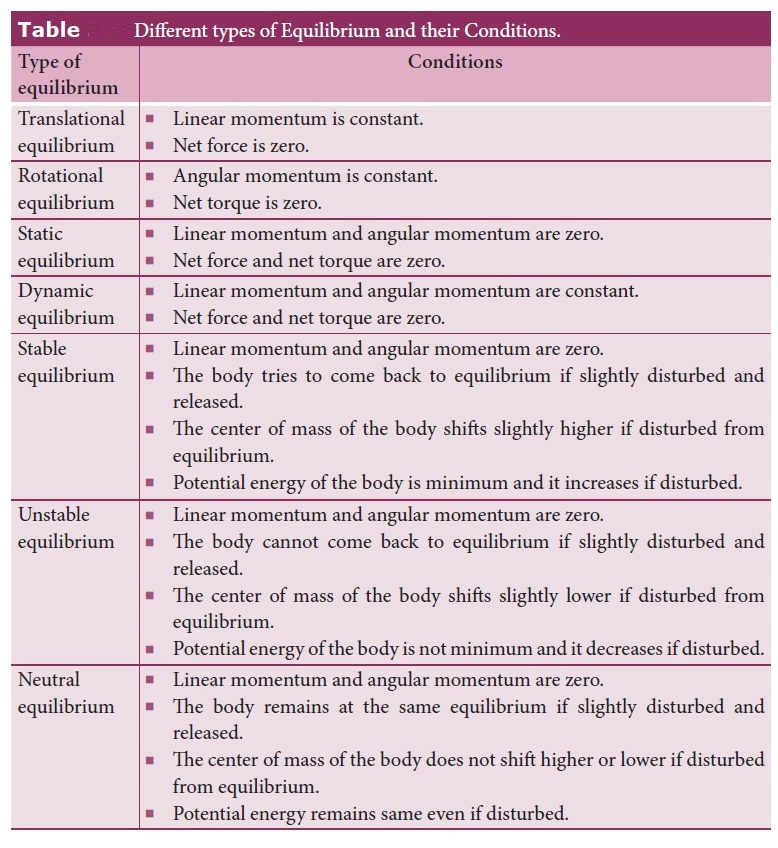
1. Explain the types of equilibrium with suitable examples.
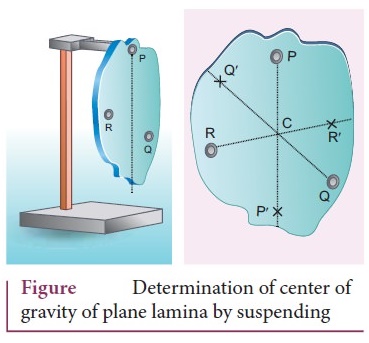
2. Explain the method to find the center of gravity of a irregularly shaped lamina.
●
It is a measure of how difficult it is to rotate a particular body about a
given axis.
●
The vertical line is marked as PP’.
●
Suspend the body through other points like Q and R.
●
Mark the vertical line as QQ' and RR’.
●
The intersection of the vertical (G) gives the centre of gravity of a
irregularly shaped lamina.
3. Explain why a cyclist bends while negotiating a curve road? Arrive at the expression for angle of bending for a given velocity.
●
Let us consider a cyclist negotiating a circular level road of radius ‘r’ with
a speed ‘v’.
●
The cycle and the cyclist are considered as one system with mass m.
●
C' is center of gravity, ‘r’ -radius of circle with center at ‘o’
●
The line OC are x axis, and the vertical line through O as Z axis
●
The system is at rest in this rotating frame.
The
force acting on the system are
i)
gravitational force (mg)
ii)
normal force (N)
iii)
frictional force (f) and
iv)
centrifugal force (pseudo force) which acts through center of gravity.
●
The System is in equlibrium in the rotational frames of reference.
Fnet
= 0 ;
τnet = 0

●
The torque due to gravitational force about point A = −mgAB (Clockwise)
●
The torque due to centripetal force = mv2 / r (BC) (anti clockwise)
●
−mgAB + mv2/r BC = 0 ; mgAB = mv2/r BC
From
∆ ABC
AB
= AC sin θ
BC = AC cos θ
mg
AC sin θ = [ mv2 / r ] AC cosθ
tanθ
= v2 / rg
θ
= tan-1 (v2 / rg)
A
cyclist has to bend by an angle θ to stay in equilibrium.
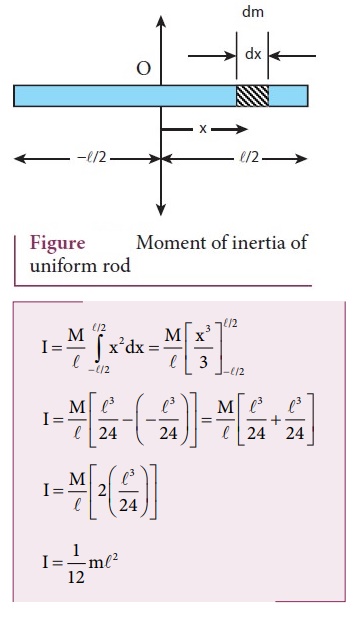
4. Derive the expression for moment of inertia of a rod about its center and perpendicular to the rod.
●
First an origin is to be fixed for the coordinate system which is also the
geometric centre of the rod.
●
The rod is now along x axis.
●
An infinitesimally small mass (dm) at a distance x from origin.
∴ dI = dm x2
∴ I = mr2
●
Mass per unit length λ = m/ℓ
●
Mass of length dx = dm = λ.dx = (m/ℓ) dx
●
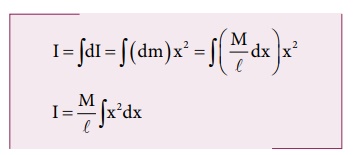
Moment of inertia of entire rod, I = ʃ dI
= ʃ dmx2
I = ʃ ( m/ℓ dx ) . x2
●
As the mass is distributed on either side, limits taken from −ℓ/2 to ℓ/2
.
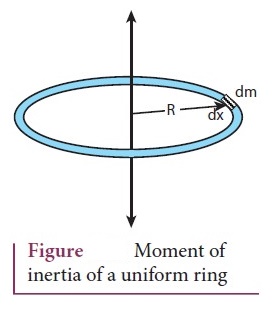
5. Derive the expression for moment of inertia of a uniform ring about an axis passing through the center and perpendicular to the plane.
●
Let us consider a uniform ring of mass M and radius R.
●
dm - infinitesimal small mass (dm) of length (dx)
R
- Radius of the ring from the axis.
dI = (dm) R2
●
The Length of the ring = 2πR (Circumference)
●
Mass per unit length λ = M / 2πR
● Mass of length dx, dm = λdx
dm = (M / 2πR) dx
●
Moment of inertia I = ʃ dI
= ʃ (dm) R2
I = [MR / 2π] ʃ dx
To
cover entire length limits taken from 0 to 2πR
I
= (MR / 2π ) ʃ 2πR0 dx
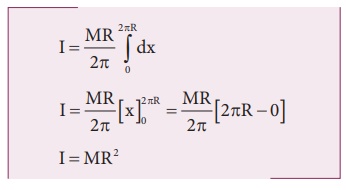
I
= (MR / 2π) (x)2πR0 ; I = (MR / 2π) (2πR-0)
I = MR2
6. Derive the expression for moment of inertia of a uniform disc about an axis passing through the center and perpendicular to the plane.
Consider
a disc of mass M and radius R. This disc is mad up of many infinite simally
small rings
dI = (dm) r2
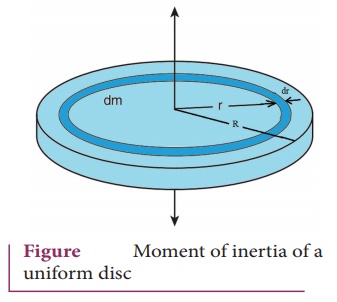
Mass per unit area σ = M / πR2
Mass
of small ring
dm
= σ 2πrdr
dm
= [ M/πR2 ] 2πrdr
Where
2πrdr is the area of this element ring
dm
= 2M / R2 (rdr)
dI
= 2M / R2 (r3dr)
I
= ʃ dI
= [2M / R2 ] Rʃ0r3dr
I
= 2M / R2 [ r4 / 4]R0 = 2M / R2
[ R4/4 - 0]
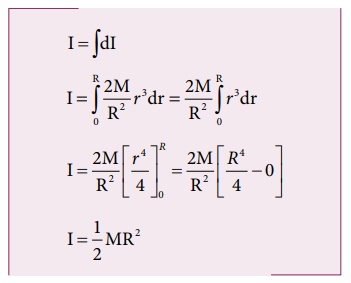
I = ½ MR2
7. Discuss conservation of angular momentum with example.
●
When no external torque acts on the body the net angular momentation of a
rotating rigid body remains conslant.
τ
= dL / dt
If
τ = 0
L
= constant
(ie)
Iω = constant
●
I increases ω will decrease and vice-versa. Example: The ice dancer
●
The dancer spins slowly when the hands are stretched out and spins faster when
the hands are brought close to the body.
●
Stretching of hands away from body increases moment of inertia, thus the
angular velocity decreases resulting in slower spin.
●
When the hands are brought close to the body, the moment of inertia decreases,
and thus the angular velocity increases resulting in faster spin.
8. State and prove parallel axis theorem.
Statement: Parallel
axis theorem states that the moment of inertia of a body about any axis (I) is
equal to the sum of its moment of inertia about a parallel axis through its
center of mass (I) and the product of the mass of the body and the square of
the perpendicular distance between the two axes (Md2).
I = Ic + Md2
I = Ic + (Σm) d2
Proof:
●
Let us consider a rigid body as shown in Figure
●
Its moment of inertia about an axis AB passing through the center of mass is Ic.
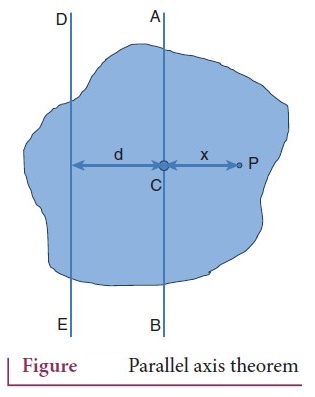
●
DE is another axis parallel to AB at a perpendicular distance d from AB. The
moment of inertia of the body about DE is I.
●
let us consider a point mass m on the body at position x from its center of
mass.
● The moment of inertia of the point mass about the axis DE is = m(x + d)2.
●
The moment of inertia I of the whole body about
DE,
I = Σm(x+d)2
I
= Σm(x2 + d2 + 2xd)
=
Σ(mx2+rnd2+2dmx)
I = Σmx2 + Σmd2 +
2dΣmx
Here,
Ic
= Σmx2 (moment of inertia of the body about the center of mass)
Σmx
= O (because, x can take positive and negative values with respect to the axis
AB.)
∴ I = Ic
+ (Σm)d2
Where,
Σm
= M
I = Ic + Md2
Hence
parallel axis theorem is proved.
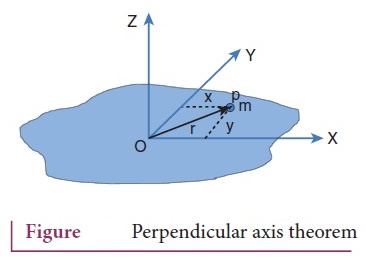
9. State and prove perpendicular axis theorem.
Statement: The
moment of inertia of a plane laminar body about an axis perpendicular to its
plane is equal to the sum of moment of inertia about two perpendicular axes
lying in the plane of the body such that all the three axes are mutually
perpendicular and have a common point.
Iz = Ix + Iy
Proof
:
●
let us consider a plane laminar object of negligible thickness on which lies
the origin (O).
●
The X and Y-axes lie on the plane and Z-axis is perpendicular to it.
●
The laminar is considered to be made up of a large number of particles of mass
m. Let us choose one such particle at a point P which has coordinates (x, y) at
a distance r from O.
●
The moment of inertia of the particle about Z axis = mr2
●
The moment of inertia of the entire laminar about Z axis Iz = Σmr2
r2
= x2 + y2
Iz
= Σm (x2 + y2)
Iz
= Σmx2 + Σmy2 ………… (1)
where
Σmx2
- moment of intertia of the body about the y axis.
Σmy2
- moment of intertia of the body about the x axis.
Ix
= Σmy2 ……….. (2)
Iy
= Σmx2 ……….. (3)
Substituting
(2) and (3) in the equation (1)
Iz
= Ix + Iy
The
perpendicular axis theorem is proved.
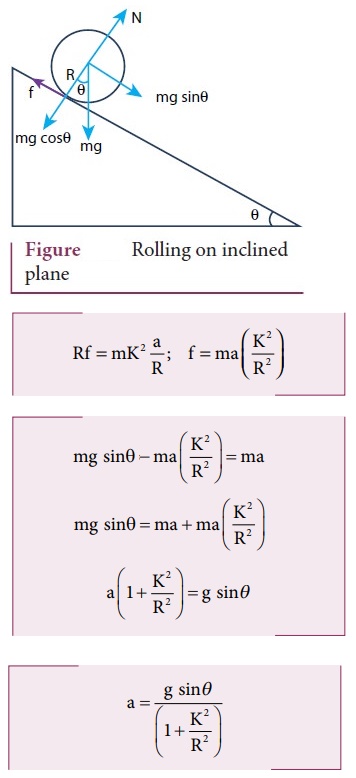
10. Discuss rolling on inclined plane and arrive at the expression for the acceleration.
●
Let us assume a round object of mass m and radius R is rolling down an inclined
plane without slipping
●
There are two forces acting on the object
i)
gravitational force (mg sinθ)
ii)
static frictional force (f).
●
The other component of gravitational force (mg cosθ) is cancelled by the normal
force (N) exerted by the plane.
●
For translational motion, mg sinθ is the supporting force and f is the opposing
force,
mg
sinθ - f = ma ………. (1)
●
For rotational motion, let us take the torque with respect to the center of the
object.
●
Then mg sinθ cannot cause torque as it passes through it but the frictional
force f can set torque of Rf.
Rf
= Iα
a
= rα
I
= mk2
Rf
= mk2(a/R)
f = m (K2 / R2)
a
…………(2)
Sub
(2) in (1)
mg
sinθ – ma (K2 / R2) = ma
mg
sinθ = ma + ma (K2 / R2)
a
( 1 + K2/R2 ) = g sin θ
a
= [ g sin θ ] / [ (1 + K2 / R2) ]
Related Topics