Chapter: 11th Physics : UNIT 5 : Motion of System of Particles and Rigid Bodies
Equilibrium of Rigid Bodies
EQUILIBRIUM OF RIGID BODIES
When
a body is at rest without any motion on a table, we say that there is no force
acting on the body. Actually it is wrong because, there is gravitational force
acting on the body downward and also the normal force exerted by table on the
body upward. These two forces cancel each other and thus there is no net force
acting on the body. There is a lot of difference between the terms “no force”
and “no net force” acting on a body. The same argument holds good for
rotational conditions in terms of torque or moment of force.
A rigid body is said to be in
mechanical equilibrium when both its linear momentum and angular momentum
remain constant.
When
the linear momentum remains constant, the net force acting on the body is zero.
In
this condition, the body is said to be in translational equilibrium. This
implies that the vector sum of different forces  … acting in different directions on
the body is zero.
… acting in different directions on
the body is zero.

If
the forces … act in different directions on the body, we can resolve
them into horizontal and vertical components and then take the resultant in the
respective directions. In this case there will be horizontal as well as
vertical equilibria possible.
Similarly,
when the angular momentum remains constant, the net torque acting on the body
is zero.

Under
this condition, the body is said to be in rotational equilibrium. The vector
sum of different torques ![]() 1 ,
1 , ![]() 2
,
2
, ![]() 3
… producing different senses of rotation on the body is zero.
3
… producing different senses of rotation on the body is zero.

Thus,
we can also conclude that a rigid body is in mechanical equilibrium when the
net force and net torque acts on the body is zero.

As
the forces and torques are vector quantities, the directions are to be taken
with proper sign conventions.
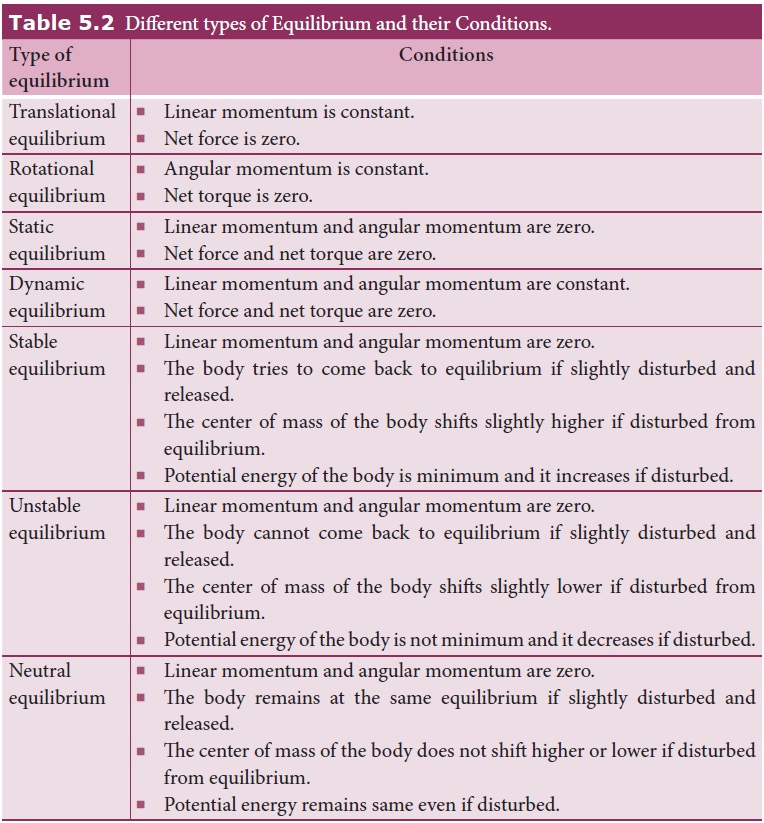
Types of Equilibrium
Based
on the above discussions, we come to a conclusion that different types of
equilibrium are possible based on the different conditions. They are
consolidated in Table 5.2.
Couple
Consider
a thin uniform rod AB. Its center of mass is at its midpoint C. Let two forces
which are equal in magnitude and opposite in direction be applied at the two
ends A and B of the rod perpendicular to it. The two forces are separated by a
distance of 2r as shown in Figure 5.13.
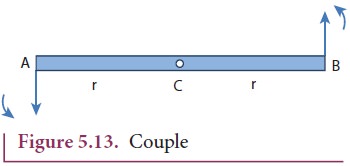
As
the two equal forces are opposite in direction, they cancel each other and the
net force acting on the rod is zero. Now the rod is in translational
equilibrium. But, the rod is not in rotational equilibrium. Let us see how it
is not in rotational equilibrium. The moment of the force applied at the end A
taken with respect to the center point C, produces an anticlockwise rotation.
Similarly, the moment of the force applied at the end B also produces an
anticlockwise rotation. The moments of both the forces
cause
the same sense of rotation in the rod. Thus, the rod undergoes a rotational
motion or turning even though the rod is in translational equilibrium.
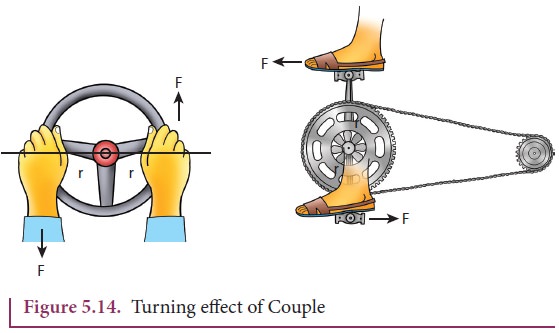
A pair of forces which are equal in
magnitude but opposite in direction and separated by a perpendicular distance
so that their lines of action do not coincide that causes a turning effect is called a couple. We come across couple in many of our daily activities as shown in
Figure 5.14.
Principle of Moments
Consider
a light rod of negligible mass which is pivoted at a point along its length.
Let two parallel forces F1 and F2 act at the two ends at
distances d1 and d2 from the point of pivot and the
normal reaction force N at the point of pivot as shown in Figure 5.15. If the
rod has to remain stationary in horizontal position, it should be in
translational and rotational equilibrium. Then, both the net force and net
torque must be zero.
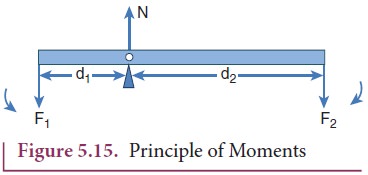
For
net force to be zero, − F1 + N − F2 = 0

For
net torque to be zero, d1F1 − d2 F2 = 0

The
above equation represents the principle
of moments. This forms the
principle for beam balance used for
weighing goods with the condition d1 = d2; F1
= F2. We can rewrite the equation 5.33 as,
If
F1 is the load and F2 is our effort, we get advantage
when, d1< d2. This implies that F1> F2.
Hence, we could lift a large load with small effort. The ratio (d2/d1)
is called mechanical advantage of the simple lever. The pivoted point is called
fulcrum.
There
are many simple machines that work on the above mentioned principle.
Center of Gravity
Each
rigid body is made up of several point masses. Such point masses experience
gravitational force towards the center of Earth. As the size of Earth is very
large compared to any practical rigid body we come across in daily life, these
forces appear to be acting parallelly downwards as shown in Figure 5.16.
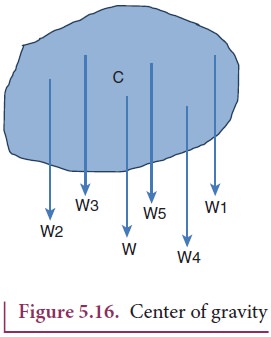
The
resultant of these parallel forces always acts through a point. This point is
called center of gravity of the body (with respect to Earth). The center of gravity of a body is the point at which the entire weight of the body
acts irrespective of the position and orientation of the body. The center
of gravity and center of mass of a
rigid body coincide when the gravitational field is uniform across the body.
The concept of gravitational field is dealt in Unit 6.
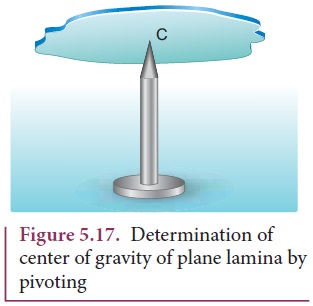
We
can also determine the center of gravity of a uniform lamina of even an
irregular shape by pivoting it at various points by trial and error. The lamina
remains horizontal when pivoted at the point where the net gravitational force
acts, which is the center of gravity as shown in Figure 5.17. When a body is
supported at the center of gravity, the sum of the torques acting on all the
point masses of the rigid body becomes zero. Moreover the weight is compensated
by the normal reaction force exerted by the pivot. The body is in static equilibrium
and hence it remains horizontal.
There
is also another way to determine the center of gravity of an irregular lamina.
If we suspend the lamina from different
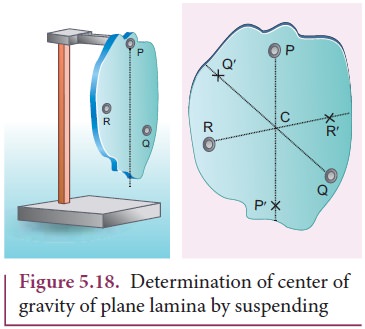
Here, reaction force acting at the point of
suspension and the gravitational force acting at the center of gravity cancel
each other and the torques caused by them also cancel each other.
Bending of Cyclist in Curves
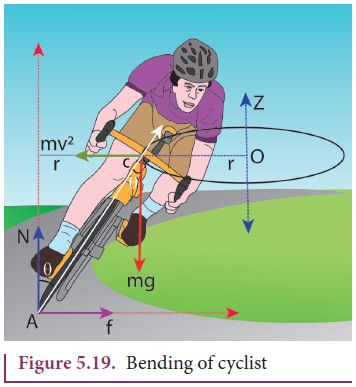
Let
us consider a cyclist negotiating a circular level road (not banked) of radius
r with a speed v. The cycle and the cyclist are considered as one system with
mass m. The center gravity of the system is C and it goes in a circle of radius
r with center at O. Let us choose the line OC as X-axis and the vertical line
through O as Z-axis as shown in Figure 5.19.
The
system as a frame is rotating about Z-axis. The system is at rest in this
rotating frame. To solve problems in rotating frame of reference, we have to
apply a centrifugal force (pseudo force) on the system which will be mv2/r
This
force will act through the center of gravity. The forces acting on the system
are, (i) gravitational force (mg), (ii) normal force (N), (iii) frictional
force (f) and (iv) centrifugal force (mv2/r) . As the system is
in equilibrium in the rotational frame of reference, the net external force and
net external torque must be zero. Let us consider all torques about the point A
in Figure 5.20.
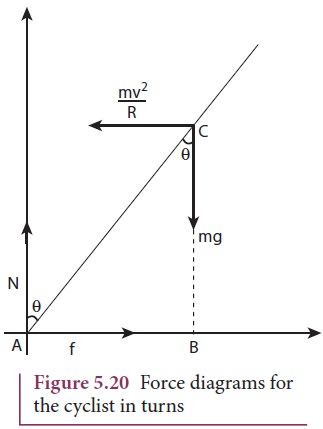
For
rotational equilibrium,

The
torque due to the gravitational force about point A is ( mgAB) which causes a clockwise turn that
is taken as negative. The torque due to the centripetal force is ( mv2/r
BC) which causes an anticlockwise turn that is taken as positive.
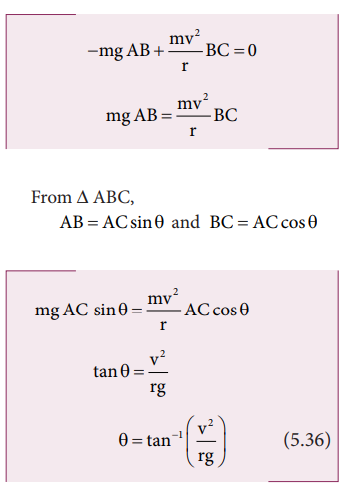
While
negotiating a circular level road of radius r at velocity v, a cyclist has to
bend by an angle θ from vertical given by the above
expression to stay in equilibrium (i.e. to avoid a fall).
Solved
Example Problems for Types of Equilibrium
Example 5.12
Arun and Babu carry a wooden log of mass 28 kg and length 10 m which has almost uniform thickness. They hold it at 1 m and 2 m from the ends respectively. Who will bear more weight of the log? [g = 10 ms-2]
Solution
Let us consider the log is in mechanical equilibrium. Hence, the net force and net torque on the log must be zero. The gravitational force acts at the center of mass of the log downwards. It is cancelled by the normal reaction forces RA and RB applied upwards by Arun and Babu at points A and B respectively. These reaction forces are the weights borne by them.
The total weight, W = mg = 28 × 10 = 280 N, has to be borne by them together. The reaction forces are the weights borne by each of them separately. Let us show all the forces acting on the log by drawing a free body diagram of the log.
For translational equilibrium:
The net force acting on the log must be zero.
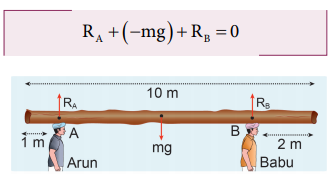
Here, the forces RA an RB are taken positive as they act upward. The gravitational force acting downward is taken negative.

For rotational equilibrium:
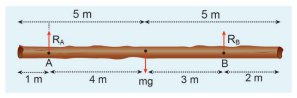
The net torque acting on the log must be zero. For ease of calculation, we can take the torque caused by all the forces about the point A on the log. The forces are perpendicular to the distances. Hence,
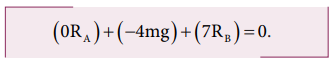
Here, the reaction force RA cannot produce any torque as the reaction forces pass through the point of reference A. The torque of force mg produces a clockwise turn about the point A which is taken negative and torque of force RB causes anticlockwise turn about A which is taken positive.
As RB is greater than RA, it is concluded that Babu bears more weight than Arun. The one closer to center of mass of the log bears more weight.
Solved
Example Problems for Bending of Cyclist in Curves
Example 5.13
A cyclist while negotiating a circular path with speed 20 m s-1 is found to bend an angle by 30o with vertical. What is the radius of the circular path? (given, g = 10 m s-2)
Solution
Speed of the cyclist, v = 20 m s-1
Angle of bending with vertical, θ = 30o
Related Topics