with Solved Example Problems - Center of Mass | 11th Physics : UNIT 5 : Motion of System of Particles and Rigid Bodies
Chapter: 11th Physics : UNIT 5 : Motion of System of Particles and Rigid Bodies
Center of Mass
CENTER OF MASS
When
a rigid body moves, all particles that constitute the body need not take the
same path. Depending on the type of motion, different particles of the body may
take different paths. For example, when a wheel rolls on a surface, the path of
the center point of the wheel and the paths of other points of the wheel are
different. In this Unit, we study about the translation, rotation and the
combination of these motions of rigid bodies in detail.
Center of Mass of a Rigid Body
When
a bulk object (say a bat) is thrown at an angle in air as shown in Figure 5.1;
do all the points of the body take a parabolic path? Actually, only one point
takes the parabolic path and all the other points take different paths.
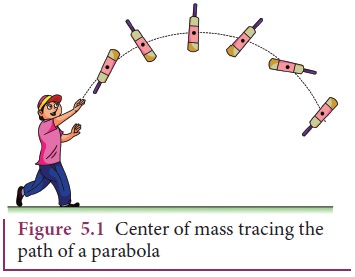
The
one point that takes the parabolic path is a very special point called center of mass (CM) of the body. Its motion is like the motion of a single point that is thrown. The center of mass of a body
is defined as a point where the entire mass of the body appears to be
concentrated. Therefore, this point can
represent the entire body.
For
bodies of regular shape and uniform mass distribution, the center of mass is at
the geometric center of the body. As examples, for a circle and sphere, the
center of mass is at their centers; for square and rectangle, at the point
their diagonals meet; for cube and cuboid, it is at the point where their body
diagonals meet. For other bodies, the center of mass has to be determined using
some methods. The center of mass could be well within the body and in some
cases outside the body as well.
Center of Mass for Distributed Point Masses
A point mass is a hypothetical point
particle which has nonzero mass and no size or shape.
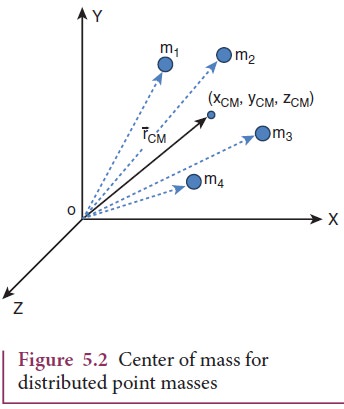
To find the center of mass for a collection of n point masses, say, m1,
m2, m3 . . . mn we have to first choose an
origin and an appropriate coordinate system as shown in Figure 5.2. Let, x1,
x2, x3 . . . xn be the X-coordinates of the
positions of these point masses in the X direction from the origin.
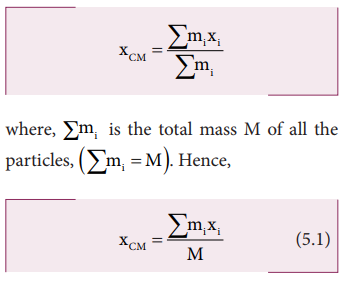
The
equation for the X coordinate of the center of mass is,
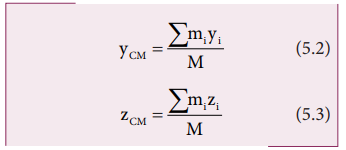
Similarly,
we can also find y and z coordinates of the center of mass for these
distributed point masses as indicated in Figure (5.2).
Hence,
the position of center of mass of these point masses in a Cartesian coordinate
system is (xCM, yCM, zCM). In general, the
position of center of mass can be written in a vector form as,
Center of Mass of Two Point Masses
With
the equations for center of mass, let us find the center of mass of two point
masses m1 and m2, which are at positions x1
and x2 respectively on the X-axis. For this case, we can express the
position of center of mass in the following three ways based on the choice of
the coordinate system.
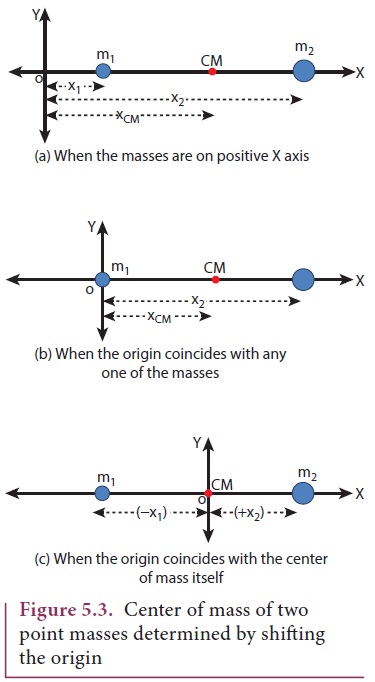
(i) When the masses are on positive X-axis:
The origin is taken arbitrarily so that the masses m1
and m2 are at positions x1 and x2 on the
positive X-axis as shown in Figure 5.3(a). The center of mass will also be on
the positive X-axis at xCM as given by the equation,
(ii) When the origin coincides with any one of the masses:
The
calculation could be minimised if the origin of the coordinate system is made
to coincide with any one of the masses as shown in Figure 5.3(b). When the
origin coincides with the point mass m1, its position x1
is zero, (i.e. x1 = 0). Then,
(iii) When the origin coincides with the center of mass itself:
If
the origin of the coordinate system is made to coincide with the center of mass,
then, xCM = 0 and the mass m1 is
found to be on the negative X-axis as shown in Figure 5.3(c). Hence, its
position x1 is negative, (i.e. -x1).
The
equation given above is known as principle
of moments. We will learn more about
this in Section 5.3.3.
Center
of mass for uniform distribution of mass
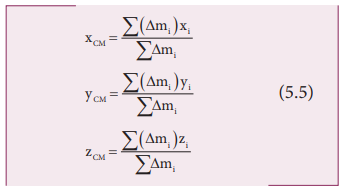
If
the mass is uniformly distributed in a bulk object, then a small mass (∆m) of the body can be treated as a point mass and the
summations can be done to obtain the expressions for the coordinates of center
of mass.
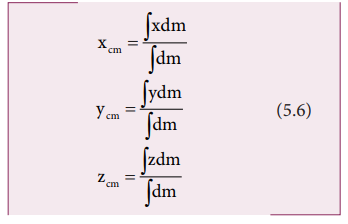
On
the other hand, if the small mass taken is infinitesimally* small (dm) then, the summations can be replaced by
integrations as given below.
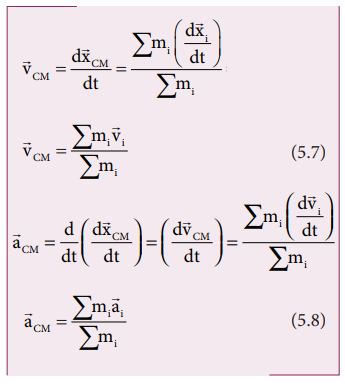
Motion of Center of Mass
When
a rigid body moves, its center of mass will also move along with the body. For
kinematic quantities like velocity ( vCM ) and acceleration ( aCM ) of the center of mass, we can differentiate the expression
for position of center of mass with respect to time once and twice
respectively. For simplicity, let us take the motion along X direction only.
In
the absence of external force, i.e. ![]() ext
= 0, the individual rigid bodies of a system can move or
shift only due to the internal forces. This will not affect the position of the
center of mass. This means that the center of mass will be in a state of rest
or uniform motion. Hence,
ext
= 0, the individual rigid bodies of a system can move or
shift only due to the internal forces. This will not affect the position of the
center of mass. This means that the center of mass will be in a state of rest
or uniform motion. Hence, ![]() CM will be zero when center of
mass is at rest and constant when center of mass has uniform motion (
CM will be zero when center of
mass is at rest and constant when center of mass has uniform motion (![]() CM =0 or
CM =0 or ![]() CM = constant) There will be no acceleration of
center of mass, (
CM = constant) There will be no acceleration of
center of mass, (![]() CM =0).
CM =0).
From equation 5.7 and 5.8,
Here,
the individual particles may still move with their respective velocities and
accelerations due to internal forces.
In
the presence of external force, (i.e. ![]() ext ≠ 0), the center
of mass of the system will accelerate as given by the following equation.
ext ≠ 0), the center
of mass of the system will accelerate as given by the following equation.
Center of mass in explosions:
Many
a times rigid bodies are broken in to fragments. If an explosion is caused by
the internal forces in a body which is at rest or in motion, the state of the
center of mass is not affected. It continues to be in the same state of rest or
motion. But, the kinematic quantities of the fragments get affected. If the
explosion is caused by an external agency, then the kinematic quantities of the
center of mass as well as the fragments get affected.
Solved Example Problems for Center of Mass of Two Point Masses
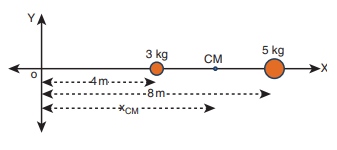
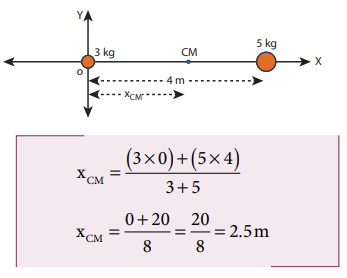
Example 5.1
Two point masses 3 kg and 5 kg are at 4 m and 8 m from the origin on X-axis. Locate the position of center of mass of the two point masses (i) from the origin and (ii) from 3 kg mass.
Solution
Let us take, m1 = 3 kg and m2= 5 kg
(i) To find center of mass from the origin:
The point masses are at positions, x1 = 4 m, x2 = 8 m from the origin along X axis.
The center of mass xCM can be obtained using equation 5.4.
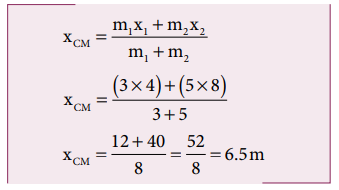
The center of mass is located 6.5 m from the origin on X-axis.
(ii) To find the center of mass from 3 kg mass:
The origin is shifted to 3 kg mass along X-axis. The position of 3 kg point mass is zero (x1 = 0) and the position of 5 kg point mass is 4 m from the shifted origin (x2 = 4 m).
The center of mass is located 2.5 m from 3 kg point mass, (and 1.5 m from the 5 kg point mass) on X-axis.
This result shows that the center of mass is located closer to larger mass.
If the origin is shifted to the center of mass, then the principle of moments holds good.
m1x1=m2x2; 3x2.5=5x1.5;7.5=7.5
When we compare case (i) with case (ii), the xCM = 2.5m from 3 kg mass could also be obtained by subtracting 4 m (the position of 3 kg mass) from 6.5 m, where the center of mass was located in case (i)
Example 5.2
From a uniform disc of radius R, a small disc of radius R/2 is cut and removed as shown in the diagram. Find the center of mass of the remaining portion of the disc.
Solution
Let us consider the mass of the uncut full disc be M. Its center of mass would be at the geometric center of the disc on which the origin coincides.
Let the mass of the small disc cut and removed be m and its center of mass is at a position R/2 to the right of the origin as shown in the figure.
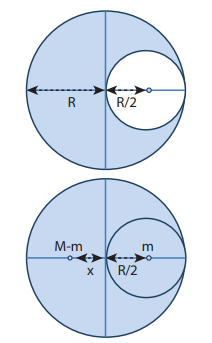
Hence, the remaining portion of the disc should have its center of mass to the left of the origin; say, at a distance x. We can write from the principle of moments,
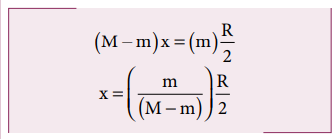
If σ is the surface mass density (i.e. mass per unit surface area), σ=M/πR2; then, the mass m of small disc is,
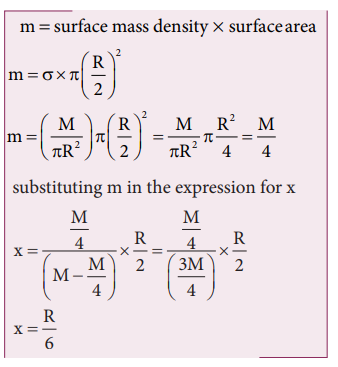
The center of mass of the remaining portion is at a distance R/6 to the left from the center of the disc.
If, the small disc is removed concentrically from the large disc, what will be the position of the center of mass of the remaining portion of disc?
Example 5.3
Solved Example Problems for Center of mass for uniform distribution of mass
Example 5.4
Locate the center of mass of a uniform rod of mass M and length l.
Solution
Consider a uniform rod of mass M and length whose one end coincides with the origin as shown in Figure. The rod is kept along the x axis. To find the center of mass
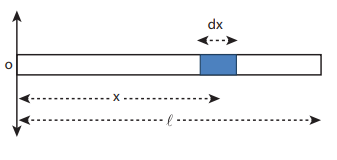
of this rod, we choose an infinitesimally small mass dm of elemental length dx at a distance x from the origin.
Now, we can write the center of mass equation for this mass distribution as,
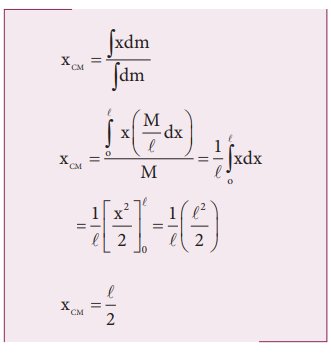
As the position l/2 is the geometric center of the rod, it is concluded that the center of mass of the uniform rod is located at its geometric center itself.
Solved Example Problems for Motion of Center of Mass
Example 5.5
A man of mass 50 kg is standing at one end of a boat of mass 300 kg floating on still water. He walks towards the other end of the boat with a constant velocity of 2 ms-1 with respect to a stationary observer on land. What will be the velocity of the boat, (a) with respect to the stationary observer on land? (b) with respect to the man walking in the boat?
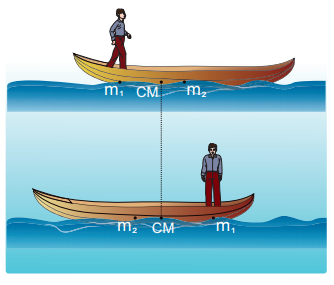
[Given: There is friction between the man and the boat and no friction between the boat and water.]
Solution
Mass of the man (m1) is, m1= 50 kg
Mass of the boat (m2) is, m2 = 300 kg
With respect to a stationary observer:
The man moves with a velocity, v1 = 2 m s-1 and the boat moves with a velocity v2 (which is to be found)
(i) To determine the velocity of the boat with respect to a stationary observer on land:
As there is no external force acting on the system, the man and boat move due to the friction, which is an internal force in the boat-man system. Hence, the velocity of the center of mass is zero (vCM = 0).
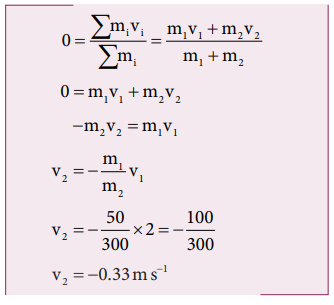
The negative sign in the answer implies that the boat moves in a direction opposite to that of the walking man on the boat to a stationary observer on land.
(ii) To determine the velocity of the boat with respect to the walking man:
We can find the relative velocity as,

where, v21 is the relative velocity of the boat with respect to the walking man.
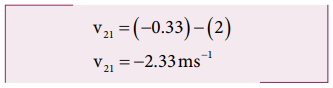
The negative sign in the answer implies that the boat appears to move in the opposite direction to the man walking in the boat.
The magnitude of the relative velocity of the boat with respect to the walking man is greater than the magnitude of the relative velocity of the boat with respect to the stationary observer.
The negative signs in the two answers indicate the opposite direction of the boat with respect to the stationary observer and the walking man on the boat.
Example 5.6
A projectile of mass 5 kg, in its course of motion explodes on its own into two fragments. One fragment of mass 3 kg falls at three fourth of the range R of the projectile. Where will the other fragment fall?
Solution
It is an explosion of its own without any external influence. After the explosion, the center of mass of the projectile will continue to complete the parabolic path even though the fragments are not following the same parabolic path. After the fragments have fallen on the ground, the center of mass rests at a distance R (the range) from the point of projection as shown in the diagram.
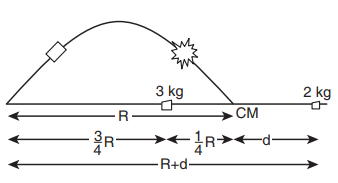
If the origin is fixed to the final position of the center of mass, the principle of moments holds good.

The other fragment falls at a distance of 1.375R from the point of launching. (Here R is the range of the projectile.)
Related Topics