Chapter: 11th Physics : UNIT 2 : Kinematics
Elementary Concepts of Vector Algebra
ELEMENTARY CONCEPTS OF VECTOR ALGEBRA
In
physics, some quantities possess only magnitude and some quantities possess
both magnitude and direction. To understand these physical quantities, it is
very important to know the properties of vectors and scalars.
Scalar
It
is a property which can be described only by magnitude. In physics a number of
quantities can be described by scalars.
Examples
Distance,
mass, temperature, speed and energy
Vector
It
is a quantity which is described by both magnitude and direction. Geometrically
a vector is a directed line segment which is shown in Figure 2.10. In physics
certain quantities can be described only by vectors.
Examples
Force,
velocity, displacement, position vector, acceleration, linear momentum and
angular momentum
Magnitude of a Vector
The
length of a vector is called magnitude of the vector. It is always a positive
quantity. Sometimes the magnitude of a vector is also called ‘norm’ of the
vector. For a vector ![]() , the
magnitude or norm is denoted by |
, the
magnitude or norm is denoted by |![]() | or simply ‘A’ (Figure 2.11).
| or simply ‘A’ (Figure 2.11).
Different
types of Vectors
1. Equal vectors: Two vectors ![]() and
and ![]() are said to be equal when they have equal magnitude and same direction
and represent the same physical quantity (Figure 2.12.).
are said to be equal when they have equal magnitude and same direction
and represent the same physical quantity (Figure 2.12.).
a. Collinear vectors: Collinear vectors are those which act along the same
line. The angle between them can be 0° or 180°.
i. Parallel Vectors: If two vectors ![]() and
and ![]() act in the same
direction along the same line or on parallel line, then the angle between them
is 00 (Figure 2.13).
act in the same
direction along the same line or on parallel line, then the angle between them
is 00 (Figure 2.13).
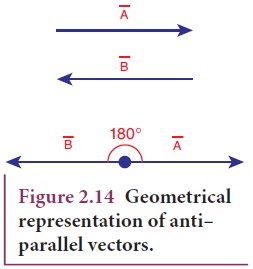
ii. Anti-parallel vectors: Two vectors ![]() and
and ![]() are said to be anti-parallel when
they are in opposite directions along the same line or on parallel lines. Then
the angle between them is 180o (Figure 2.14).
are said to be anti-parallel when
they are in opposite directions along the same line or on parallel lines. Then
the angle between them is 180o (Figure 2.14).
2. Unit vector: A vector divided by its magnitude is a unit vector. The unit
vector for ![]() is denoted by Aˆ (read as A cap or A hat). It has a magnitude equal to
unity or one.
is denoted by Aˆ (read as A cap or A hat). It has a magnitude equal to
unity or one.
Thus,
we can say that the unit vector specifies only the direction of the vector
quantity.
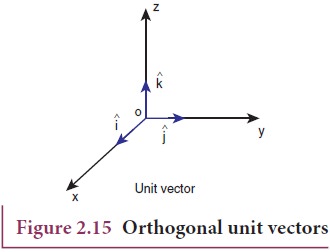
3. Orthogonal unit vectors: Let iˆ , jˆ and kˆ be three unit
vectors which specify the directions along positive x-axis, positive y-axis
and positive z-axis respectively. These three unit vectors are directed
perpendicular to each other, the angle between any two of them is 90°. iˆ , jˆ and kˆ are examples of orthogonal vectors. Two vectors which are perpendicular
to each other are called orthogonal vectors as is shown in the Figure 2.15
Addition of Vectors
Since
vectors have both magnitude and direction they cannot be added by the method of
ordinary algebra. Thus, vectors can be added geometrically or analytically
using certain rules called ‘vector algebra’. In order to find the sum
(resultant) of two vectors, which are inclined to each other, we use (i)
Triangular law of addition method or (ii) Parallelogram law of vectors.
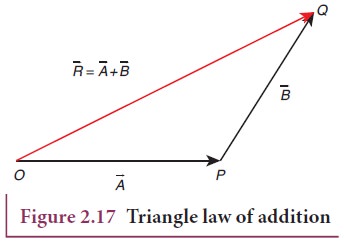
Triangular Law of a͢ddition method
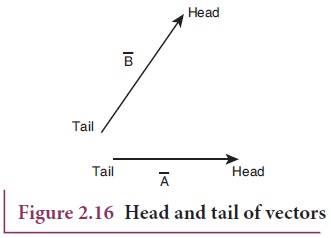
Let
us consider two vectors ![]() and
and ![]() as shown in Figure
2.16.
as shown in Figure
2.16.
To
find the resultant of the two vectors we apply the triangular law of addition
as follows:
Represent
the vectors ![]() and
and ![]() by the two adjacent sides of a
triangle taken in the same order. Then the resultant is given by the third side
of the triangle as shown in Figure 2.17.
by the two adjacent sides of a
triangle taken in the same order. Then the resultant is given by the third side
of the triangle as shown in Figure 2.17.
To
explain further, the head of the first vector ![]() is connected to the tail of the second vector
is connected to the tail of the second vector ![]() . Let θ be the angle between
. Let θ be the angle between ![]() and
and ![]() . Then
. Then ![]() is the
resultant vector connecting the tail of the first vector
is the
resultant vector connecting the tail of the first vector ![]() to the head of the second vector
to the head of the second vector ![]() . The magnitude of
. The magnitude of ![]() (resultant) is given
geometrically by the length of
(resultant) is given
geometrically by the length of ![]() (OQ) and the direction of the resultant vector is the angle between
(OQ) and the direction of the resultant vector is the angle between ![]() and
and ![]() . Thus we write =
. Thus we write =  .
.

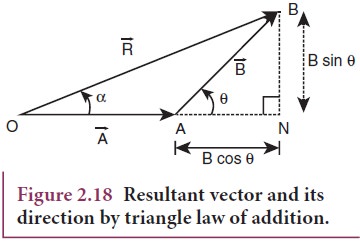
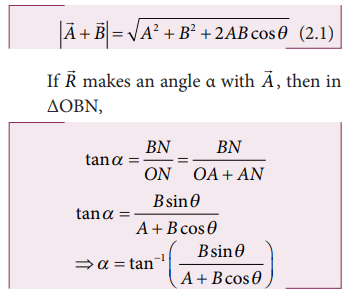
1. Magnitude of resultant vector
The
magnitude and angle of the resultant vector are determined as follows.
From
Figure 2.18, consider the triangle ABN, which is obtained by extending the side
OA to ON. ABN is a right angled triangle.
From
Figure 2.18
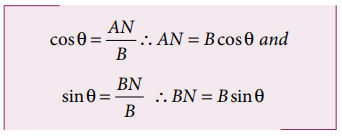
For
∆OBN, we have OB2 = ON
2 + BN
2
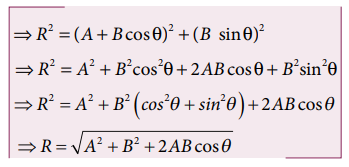
which
is the magnitude of the resultant of ![]() and
and ![]()
2. Direction of resultant vectors:
If
θ is the angle between ![]() and
and ![]() , then
, then
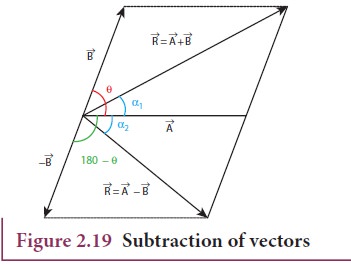
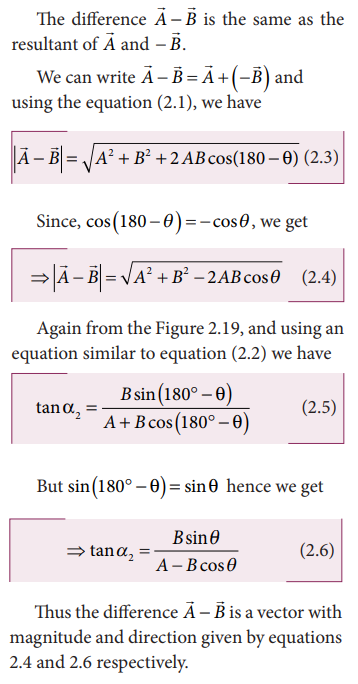
Subtraction of vectors
Since
vectors have both magnitude and direction two vectors cannot be subtracted from
each other by the method of ordinary algebra. Thus, this subtraction can be
done either geometrically or analytically. We shall now discuss subtraction of
two vectors geometrically using the Figure 2.19
For
two non-zero vectors ![]() and
and ![]() which are inclined to each other at an
angle θ, the difference
which are inclined to each other at an
angle θ, the difference ![]() −
− ![]() is
obtained as follows. First obtain −
is
obtained as follows. First obtain − ![]() as in Figure 2.19. The angle between
as in Figure 2.19. The angle between ![]() and −
and − ![]() is 180-θ.
is 180-θ.
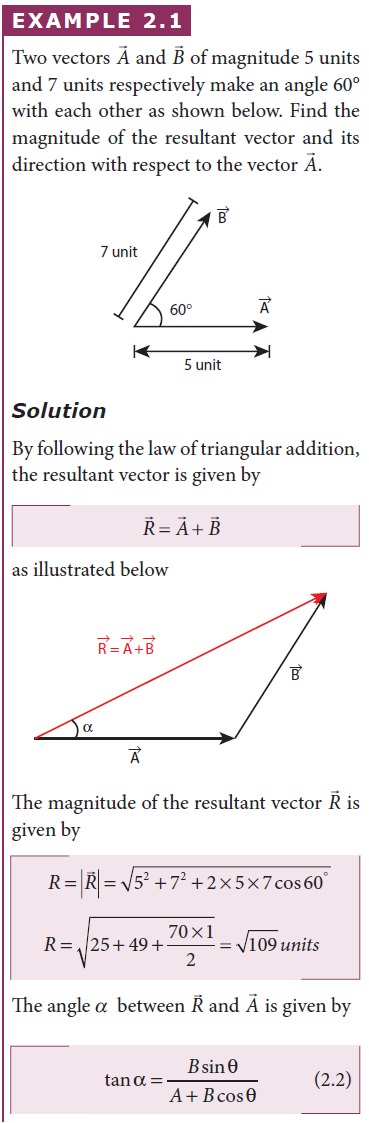
Solved Example Problem for Addition of Vectors
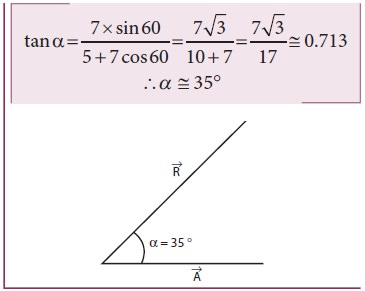
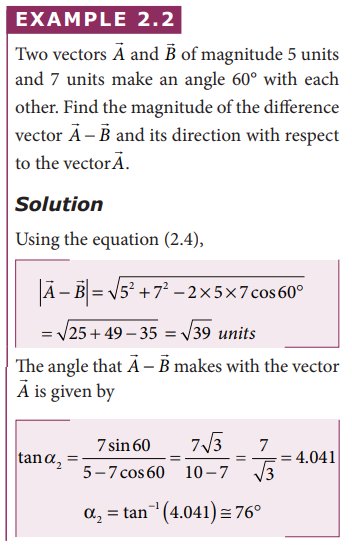
Solved Example Problem for Subtraction of vectors
Related Topics