Chapter: Embedded Systems
Embedded Software Development Tools
EMBEDDED SOFTWARE DEVELOPMENT TOOLS
EMULATORS
In
computing, an emulator is hardware
or software or both that duplicates (or emulates)
the functions of one computer system (the guest)
in another computer system (the host),
different from the first one, so that the emulated behavior closely resembles
the behavior of the real system (the guest). This focus on exact reproduction
of behavior is in contrast to some other forms of computer simulation, in which
an abstract model of a system is being simulated. For example, a computer
simulation of a hurricane or a chemical reaction is not emulation.
Emulators in computing
Emulation refers to the ability of a
computer program in an electronic device to
emulate (imitate) another program or device. Many printers, for example,
are designed to emulate Hewlett-Packard LaserJet printers because so much
software is written for HP printers. If a non-HP printer emulates an HP
printer, any software written for a real HP printer will also run in the non-HP
printer emulation and produce equivalent printing.
A hardware emulator is an emulator which
takes the form of a hardware device. Examples include the DOS-compatible card
installed in some old-world Macintoshes like Centris 610 or Performa 630 that
allowed them to run PC programs and FPGA-based hardware emulators.
In a
theoretical sense, the Church-Turing thesis implies that any operating
environment can be emulated within any other. However, in practice, it can be
quite difficult, particularly when the exact behavior of the system to be
emulated is not documented and has to be deduced through reverse engineering.
It also says nothing about timing constraints; if the emulator does not perform
as quickly as the original hardware, the emulated software may run much more
slowly than it would have on the original hardware, possibly triggering time
interrupts that alter performance.
Emulation in preservation
Emulation
is a strategy in digital preservation to combat obsolescence. Emulation focuses
on recreating an original computer environment, which can be time-consuming and
difficult to achieve, but valuable because of its ability to maintain a closer
connection to the authenticity of the digital object.
Emulation
addresses the original hardware and software environment of the digital object,
and recreates it on a current machine. The emulator allows the user to have
access to any kind of application or operating system on a current platform,
while the software runs as it did in its original environment. Jeffery
Rothenberg, an early proponent of emulation as a digital preservation strategy
states, "the ideal approach would provide a single extensible, long-term
solution that can be designed once and for all and applied uniformly,
automatically, and in synchrony (for example, at every refresh cycle) to all
types of documents and media". He further states that this should not only
apply to out of date systems, but also be upwardly mobile to future unknown
systems. Practically speaking, when a certain application is released in a new
version, rather than address compatibility issues and migration for every
digital object created in the previous version of that application, one could
create an emulator for the application, allowing access to all of said digital
objects.
Benefits
Basilisk
II emulates a Macintosh 68k using interpretation code and dynamic
recompilation.
Emulators
allow users to play games for discontinued consoles.
Emulators
maintain the original look, feel, and behavior of the digital object, which is
just as
important as the d igital data itself.
Despite
the original cost of developing an emulator, it may prove to be the more cost
efficient solution over time.
Reduces
labor hours, because rather than continuing an ongoing task of continual data
migration for every digital object, once the library of past and present o
perating systems and application software is established in an emulator, these
same tech nologies are used for every document using those platforms.
Many
emulators have already been developed and released under GN U General Public
License through the open source environment, allowing for wide scale co
llaboration.
Emulators
allow softwar e exclusive to one system to be used on another. For example, a
PlayStation
2 exclusive video game could (in theory) be played on a PC or Xbox 360 using an
emulator. This i s especially useful when the original system is d ifficult to
obtain, or incompatible with modern equipment (e.g. old video game consoles may
be unable to connect to modern TVs).
OBSTACLES
Intellectual
property - Many t echnology vendors implemented non-standard features during
program development in order to establish their niche in the market, whil e
simultaneously applying ongoing upgrades to remain competitive. While this may
have advance d the technology industry and increased vendor's market share, it
has left users lost in a preservation nightmare with little supporting
documentation due to the proprietary nature of the hardwa re and software.
Copyright laws
are no t yet in effect
to address saving
the do cumentation and specifications
of proprietary software and hardware in an emulator module.
Emulators
are often used as a copyright infringement tool, since they allow users to play
video games without having to buy the console, and rarely make any attempt to
prevent the use of illegal copies. This leads to a number of legal
uncertainties regarding emulation, and leads to software being programmed to
refuse to work if it can tell the host is an emulator; some video games in
particular will continue to run, but not allow the player to progress beyond
some late stage in the game, often appearing to be faulty or just extremely
difficult. These protections make it more difficult to design emulators, since
they must be accurate enough to avoid triggering the protections, whose effects
may not be obvious.
EMULATORS IN NEW MEDIA ART
Because
of its primary use of digital formats, new media art relies heavily on
emulation as a preservation strategy. Artists such as Cory Arcangel specialize
in resurrecting obsolete technologies in their artwork and recognize the
importance of a decentralized and deinstitutionalized process for the
preservation of digital culture.
In many
cases, the goal of emulation in new media art is to preserve a digital medium
so that it can be saved indefinitely and reproduced without error, so that
there is no reliance on hardware that ages and becomes obsolete. The paradox is
that the emulation and the emulator have to be made to work on future
computers.
EMULATION
IN FUTURE SYSTEMS DESIGN
Emulation
techniques are commonly used during the design and development of new systems.
It eases the development process by providing the ability to detect, recreate
and repair flaws in the design even before the system is actually built. It is
particularly useful in the design of multi-cores systems, where concurrency
errors can be very difficult to detect and correct without the controlled
environment provided by virtual hardware. This also allows the software
development to take place before the hardware is ready, thus helping to
validate design decisions.
TYPES OF EMULATORS

Windows
XP running an Acorn Archimedes emulator, which is in turn runni ng a Sinclair
ZX Spectrum emulator.

Most
emulators just emulate a hardware architecture—if operating system firmware or
software is required for the desired softw are, it must be provided as well
(and may itself be emulated). Both the OS and the software will then be
interpreted by the emulator, rather than being run by native hardware. Apart
from this interpreter for the emulated binary machine' s language, some other
hardware (such as input or output devices) must be provided in virtual form as
well; for example, if writing to a specific memory location should influence
what is displayed on the screen, then this would need to be emulated.
While
emulation could, if taken to the extreme, go down to the atomic level, basing
its output on a simulation of the actual circuitry from a virtual power source,
this would be a highly unusual solution. Emulators typically stop at a
simulation of the documented hardware specifications and digital logic.
Sufficient emulation of some hardware platforms requires extrem e accuracy,
down to the level of individual clock cycles, undocumented features,
unpredictable analog elements, and implementation bugs. This i s particularly
the case with classic home computers such as the Commodore 64, whose software
often depends on highly sophisticated low-le vel programming tricks invented by
game program mers and the demoscene.
In
contrast, some other platforms have had very little use of direct hardware ad
dressing. In these cases, a simple compatibility layer may suffice. This
translates system calls for the emulated system into system calls for the host
system e.g., the Linux compatibility layer used on *BSD to run closed source
Linux native software on FreeBSD, NetBSD and OpenBSD. For example, while the
Nintendo 64 graphic p rocessor was fully programmable, most games used one of a
few pre-made programs, which were mostly self-contained and communicated with
the game via FIFO; therefore, many emulatorss do not emulate the graphic
processor at all, but simply interpret the commands received from the CPU as
the original program would.
Developers
of software for em bedded systems or video game consoles of ten design their
software on especially accurate emulators called simulators before trying it on
the real hardware. This is so that software can be produced and tested before
the final hardwar e exists in large quantities, so that it can be teste d
without taking the time to copy the program to be debugged at a low level and
without introducing the side effects of a debugger. In many cases, the
simulator is actually produced by the company providing the hardware, which
theoretically increases its accuracy.
Math
coprocessor emulators allow programs compiled with math instructions to run on
machines that don't have the coprocessor installed, but the extra work done by
the CPU may slow the system down. If a math coprocessor isn't installed or
present on the CPU, when the CPU executes any coprocessor instruction it will
make a determined interrupt (coprocessor not available), calling the math
emulator routines. When the instruction is successfully emulated, the program
continues executing.
STRUCTURE OF AN EMULATOR
Typically,
an emulator is divided into modules that correspond roughly to the emulated
computer's subsystems. Most often, an emulator will be composed of the
following modules:
a CPU
emulator or CPU simulator (the two terms are mostly interchangeable in this
case) a memory subsystem module
various
I/O devices emulators
Buses are
often not emulated, either for reasons of performance or simplicity, and
virtual peripherals communicate directly with the CPU or the memory subsystem.
MEMORY SUBSYSTEM
It is
possible for the memory subsystem emulation to be reduced to simply an array of
elements each sized like an emulated word; however, this model falls very
quickly as soon as any location in the computer's logical memory does not match
physical memory.
This
clearly is the case whenever the emulated hardware allows for advanced memory
management (in which case, the MMU logic can be embedded in the memory
emulator, made a module of its own, or sometimes integrated into the CPU
simulator).
Even if
the emulated computer does not feature an MMU, though, there are usually other
factors that break the equivalence between logical and physical memory: many
(if not most) architectures offer memory-mapped I/O; even those that do not
often have a block of logical memory mapped to ROM, which means that the memory-array
module must be discarded if the read-only nature of ROM is to be emulated.
Features such as bank switching or segmentation may also complicate memory
emulation.
As a
result, most emulators implement at least two procedures for writing to and reading
from logical memory, and it is these procedures' duty to map every access to
the correct location of the correct object.
On a
base-limit addressing system where memory from address 0 to address ROMSIZE-1 is
read-only memory, while the rest is RAM, something along the line of the
following procedures would be typical:
void WriteMemory(word
Address, word
Value) { word
RealAddress;
RealAddress
= Address + BaseRegister; if ((RealAddress < LimitRegister) && (RealAddress > ROMSIZE)) { Memory[RealAddress] = Value;
} else
{ RaiseInterrupt(INT_SEGFAULT);
}
}
word ReadMemory(word Address) { word RealAddress; RealAddress=Address+BaseRegister; if (RealAddress < LimitRegister) {
return Memory[RealAddress]; } else {
RaiseInterrupt(INT_SEGFAULT); return NULL;
}
}
CPU SIMULATOR
The CPU
simulator is often the most complicated part of an emulator. Many emulators are
written using "pre-packaged" CPU simulators, in order to concentrate
on good and efficient emulation of a specific machine.
The
simplest form of a CPU simulator is an interpreter, which is a computer program
that follows the execution flow of the emulated program code and, for every
machine code instruction encountered, executes operations on the host processor
that are semantically equivalent to the original instructions.
This is
made possible by assigning a variable to each register and flag of the
simulated CPU. The logic of the simulated CPU can then more or less be directly
translated into software algorithms, creating a software re-implementation that
basically mirrors the original hardware implementation.
The
following example illustrates how CPU simulation can be accomplished by an
interpreter. In this case, interrupts are checked-for before every instruction
executed, though this behavior is rare in real emulators for performance
reasons (it is generally faster to use a subroutine to do the work of an
interrupt).
void Execute(void) {
if (Interrupt != INT_NONE) { SuperUser = TRUE;
WriteMemory(++StackPointer, ProgramCounter);
ProgramCounter
=
InterruptPointer;
}
switch (ReadMemory(ProgramCounter++)) { /*
* Handling
of every valid instruction
* goes
here...
*/ default:
Interrupt
=
INT_ILLEGAL;
}
}
Interpreters
are very popular as computer simulators, as they are much simpler to implement than
more time-efficient alternative solutions, and their speed is more than
adequate for emulating computers of more than roughly a decade ago on modern
machines.
I/O
Most
emulators do not, as mentioned earlier, emulate the main system bus; each I/O
device is thus often treated as a special case, and no consistent interface for
virtual peripherals is provided.
This can
result in a performance advantage, since each I/O module can be tailored to the
characteristics of the emulated device; designs based on a standard, unified
I/O API can, however, rival such simpler models, if well thought-out, and they
have the additional advantage of "automatically" providing a plug-in
service through which third-party virtual devices can be used within the emulator.
A unified
I/O API may not necessarily mirror the structure of the real hardware bus: bus
design is limited by several electric constraints and a need for hardware
concurrency management that can mostly be ignored in a software implementation.
Even in
emulators that treat each device as a special case, there is usually a common
basic infrastructure for:
managing
interrupts, by means of a procedure that sets flags readable by the CPU
simulator whenever an interrupt is raised, allowing the virtual CPU to
"poll for (virtual) interrupts"
writing
to and reading from physical memory, by means of two procedures similar to the
ones dealing with logical memory (although, contrary to the latter, the former can often be left out, and direct
references to the memory array be employed instead)
VIDEO GAME CONSOLE EMULATORS
Video
game console emulators are programs that allow a personal computer or video
game console to emulate another video game console. They are most often used to
play older video games on personal computers and more contemporary video game
consoles, but they are also used to translate games into other languages, to
modify existing games, and in the development process of home brew demos and
new games for older systems. The internet has helped in the spread of console
emulators, as most - if not all - would be unavailable for sale in retail
outlets. Examples of console emulators that have been released in the last 2
decades are: Dolphin, Zsnes, Kega Fusion, Desmume, Epsxe, Project64, Visual Boy
Advance, NullDC and Nestopia.
TERMINAL EMULATORS
Terminal
emulators are software programs that provide modern computers and devices
interactive access to applications running on mainframe computer operating
systems or other host systems such as HP-UX or OpenVMS. Terminals such as the
IBM 3270 or VT100 and many others, are no longer produced as physical devices.
Instead, software running on modern operating systems simulates a
"dumb" terminal and is able to render the graphical and text elements
of the host application, send keystrokes and process commands using the
appropriate terminal protocol. Some terminal emulation applications include
Attachmate Reflection, IBM Personal Communications, Stromasys CHARON-VAX/AXP
and Micro Focus Rumba.
IN-CIRCUIT EMULATOR
An in-circuit emulator (ICE) is a hardware
device used to debug the software of an embedded system. It was historically in
the form of bond-out processor which has many internal signals brought out for
the purpose of debugging. These signals provide information about the state of
the processor.
More
recently the term also covers JTAG based hardware debuggers which provide
equivalent access using on-chip debugging hardware with standard production
chips. Using standard chips instead of custom bond-out versions makes the
technology ubiquitous and low cost, and eliminates most differences between the
development and runtime environments. In this common case, the in-circuit emulator term is a misnomer,
sometimes confusingly so, because emulation is no longer involved.
Embedded
systems present special problems for a programmer because they usually lack
keyboards, monitors, disk drives and other user interfaces that are present on
computers. These shortcomings make in-circuit software debugging tools
essential for many common development tasks.
In-circuit emulation can also
refer to the use of hardware emulation, when the emulator is plugged into a system (not always
embedded) in place of a yet-to-be-built chip (not always a processor). These
in-circuit emulators provide a way to run the system with "live" data
while still allowing relatively good debugging capabilities. It can be useful
to compare this with an in-target probe (ITP) sometimes used on enterprise
servers.
FUNCTION
An
in-circuit emulator provides a window into the embedded system. The programmer
uses the emulator to load programs into the embedded system, run them, step
through them slowly, and view and change data used by the system's software.
An
"emulator" gets its name because it emulates (imitates) the central
processing unit of the embedded system's computer. Traditionally it had a plug
that inserts into the socket where the CPU chip would normally be placed. Most
modern systems use the target system's CPU directly, with special JTAG-based
debug access. Emulating the processor, or direct JTAG access to it, lets the
ICE do anything that the processor can do, but under the control of a software
developer.
ICEs
attach a terminal or PC to the embedded system. The terminal or PC provides an
interactive user interface for the programmer to investigate and control the
embedded system. For example, it is routine to have a source code level
debugger with a graphical windowing interface that communicates through a JTAG
adapter ("emulator") to an embedded target system which has no
graphical user interface.
Notably,
when their program fails, most embedded systems simply become inert lumps of
nonfunctioning electronics . Embedded systems often lack basic functions to
detect signs of software failure, such as an MMU to catch memory access errors.
Without an ICE, the development of embedded systems can be extremely difficult,
because there is usually no way to tell what went wrong. With an ICE, the
programmer can usually test pieces of code, then isolate the fault to a
particular section of code, and then inspect the failing code and rewrite it to
solve the problem.
In usage,
an ICE provides the programmer with execution breakpoints, memory display and
monitoring, and input/output control. Beyond this, the ICE can be programmed to
look for any range of matching criteria to pause at, in an attempt to identify
the origin of the failure.
Most
modern microcontrollers utilize resources provided on the manufactured version
of the microcontroller for device programming, emulation and debugging
features, instead of needing another special emulation-version (that is,
bond-out) of the target microcontroller. Even though it is a cost-effective
method, since the ICE unit only manages the emulation instead of actually
emulating the target microcontroller, trade-offs have to be made in order to
keep the prices low at manufacture time, yet provide enough emulation features
for the (relatively few) emulation applications.
ADVANTAGES
Virtually
all embedded systems have a hardware element and a software element, which are
separate but tightly interdependent. The ICE allows the software element to be
run and tested on the actual hardware on which it is to run, but still allows
programmer conveniences to help isolate
faulty code, such as "source-level debugging" (which shows the
program the way the programmer wrote it) and single-stepping (which lets the
programmer run the program step-by-step to find errors).
Most ICEs
consist of an adaptor unit that sits between the ICE host computer and the
system to be tested. A header and cable assembly connects the adaptor to a
socket where the actual CPU or microcontroller mounts within the embedded
system. Recent ICEs enable a programmer to access the on-chip debug circuit
that is integrated into the CPU via JTAG or BDM (Background Debug Mode) in
order to debug the software of an embedded system. These systems often use a
standard version of the CPU chip, and can simply attach to a debug port on a
production system. They are sometimes called in-circuit debuggers or ICDs, to
distinguish the fact that they do not replicate the functionality of the CPU,
but instead control an already existing, standard CPU. Since the CPU does not
have to be replaced, they can operate on production units where the CPU is
soldered in and cannot be replaced. On x86 Pentiums, a special 'probe mode' is
used by ICEs to aid in debugging.[2]
In the
context of embedded systems, the ICE is not emulating hardware. Rather, it is
providing direct debug access to the actual CPU. The system under test is under
full control, allowing the developer to load, debug and test code directly.
Most host
systems are ordinary commercial computers unrelated to the CPU used for
development - for example, a Linux PC might be used to develop software for a
system using a Freescale 68HC11 chip, which itself could not run Linux.
The
programmer usually edits and compiles the embedded system's code on the host
system, as well. The host system will have special compilers that produce
executable code for the embedded system. These are called cross compilers/cross
assemblers.
SIMULATORS
Software
instruction simulators provide simulated program execution with read and write
access to the internal processor registers. Beyond that, the tools vary in capability.
Some are limited to simulation of instruction execution only. Most offer
breakpoints, which allow fast execution until a specified instruction is
executed. Many also offer trace capability, which shows instruction execution
history.
While
instruction simulation is useful for algorithm development, embedded systems by
their very nature require access to peripherals such as I/O ports, timers,
A/Ds, and PWMs. Advanced simulators help verify timing and basic peripheral
operation, including I/O pins, interrupts, and status and control registers.
These
tools provide various stimulus inputs ranging from pushbuttons connected to I/O
pin inputs, logic vector I/O input stimulus files, regular clock inputs, and
internal register value injection for simulating A/D conversion data or serial
communication input. Many embedded systems can effectively be debugged using
proper peripheral stimulus.
Simulators
offer the lowest-cost development environment. However, many real-time systems
are difficult to debug with simulation only. Simulators also typically run at
speeds 100 to 1,000 times slower than the actual embedded processor, so long
timeout delays must be eliminated when simulating.
IN-CIRCUIT EMULATORS
In-circuit
emulators are plugged into a system in place of the embedded processor. They
offer real-time code execution, full peripheral implementation, and breakpoint
capability. High-end emulators also offer real-time trace buffers, and some
will time-stamp instruction execution for code profiling (see figure).
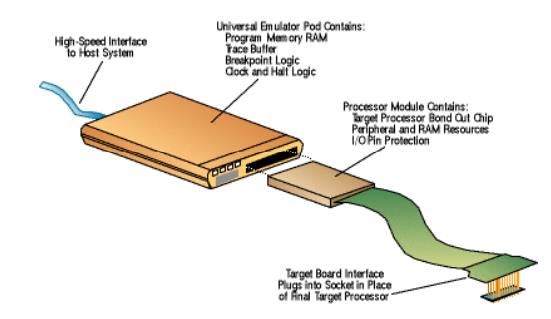
An in-circuit emulator is plugged into a target
system in place of the embedded processor.
Some
in-circuit emulators have special ASICs or FPGAs that imitate core processor
code execution and peripherals, but there may be behavioral differences between
the actual device and the emulator. The problem is sidestepped with
"bond-out" emulation devices that provide direct I/O and peripheral
access using the same circuit technology as the processor and that provide
access to the internal data registers, program memory, and peripherals.
This is
accomplished by using emulation RAM instead of the processor's internal program
memory. The microcontroller firmware is downloaded into the emulation RAM and
the bond-out processor executes instructions using the same data registers and
peripherals as the target processor. The I/Os of the bond-out silicon are made
available on a socket that is plugged into the system under development instead
of the target processor being emulated.
State-of-the-art
emulators provide multilevel conditional breakpoints and instruction trace,
including code coverage and timestamping. Some even allow code tracing without
halting the processor.
There is
a large gap in performance and price between software simulators and hardware
emulators. Between the two extremes, there is a lot of room for intermediate
solutions.
Burn-and-learn method
Simulation
is most often used with the burn-and-learn method of run-time firmware
development. A chip is burned with a device programmer; and after plugging it
into the hardware, the system crashes.
At this
point, an attempt is made to figure out what went wrong; the source code is
changed, the executable is rebuilt, and another chip is burned. This cycle is
repeated until the chip works properly.
Routines
can be added to dump vital debugging information to a serial port for display
on a terminal. I/O pins can be toggled to indicate program flow.
If more
symptoms are provided by the system as it runs, then more logical changes to
the source code can be made. Overall, this method of debugging is inefficient,
slow, and tedious.
In-circuit simulators
When
simulating code where branches are conditional on the state of an input pin or
other hardware condition, a simulator can get information on that state from
the hardware using simulator stimulus. This is the first step away from
software-only simulation, allowing a certain amount of hardware debug.
This
approach is taken by integrating the capability of a simulator with a
communication module that acts as the target processor. Stimulus is provided to
the simulation directly from the processor's digital input pins, which allows
the simulator to set binary values on the output pins.
However,
such tools run at the speed of a simulator, so they can't set and clear output
pins fast enough to implement timing-critical features like a software UART.
They often don't support complex peripheral features such as A/Ds and PWMs.
Run-time monitors
In-circuit
simulators provide a communication channel between the host development system
and the hardware, with something like a UART in the hardware to provide the
communication. The host can then issue commands to the processor to get it to
perform debug functions such as setting or reading memory contents.
Some code
execution control is also possible. This multiplexed execution of code under
development and communication of debug information with a cross-development
host is usually referred to as a run-time monitor.
Software
breakpoints can be built in at compile time. Other features, such as hooking
into a periodic timer interrupt to copy data of interest from the target to the
host, can also be included when building the executable. Since these techniques
don't require writing to program memory at run time, they can be used with
burn-and-learn debug using one-time-programmable devices.
The
routines required to transfer debug data to the host or to download a new
executable--the monitor code itself--occupy a certain amount of program memory
on the target device. They also use data memory and bandwidth in addition to
the UART or other communication device. However, most of this overhead occurs
when code execution is not in progress.
Use of a
software run-time monitor is a great step forward from simulation in isolation
from the target hardware. Adding just a few simple support features in the
silicon of the target processor can turn the monitor into a system that
provides all the basic features of an emulator.
In-circuit debuggers
The
system becomes more than a software monitor when custom silicon features are
added to the target processor. Development tools with special silicon features
to support code debug and having serial communication between host and target
are typically referred to as "debuggers."
In the
past, some systems have used external RAM program memory to support this
feature. Now reprogrammable flash memory has made in-circuit debuggers (ICDs)
practical for single-chip embedded microcontrollers. ICDs allow the embedded
processor to "self-emulate."
A good
example of an in-circuit debugger is the MPLAB-ICD, a powerful, low-cost,
run-time development tool. MPLAB-ICD uses the in-circuit debugging capability
built into the PIC16F87X or PIC18Fxxx microcontrollers.
This
feature, along with the In-Circuit Serial Programming (ICSP) protocol, offers
cost-effective in-circuit flash program load and debugging from the graphical
user interface of the MPLAB Integrated Development Environment. The designer
can develop and debug source code by watching variables, single-stepping, and
setting breakpoints. Running the device at full speed enables testing hardware
in real time.
The
in-circuit debugger consists of three basic components: the ICD module, ICD
header, and ICD demo board. The MPLAB software environment is connected to the
ICD module via a serial or full-speed USB port.
When
instructed by MPLAB, the ICD module programs and issues debug commands to the
target microcontroller using the ICSP protocol, which is communicated via a
five-conductor cable using a modular RJ-12 plug and jack. A modular jack can be
designed into a target circuit board to support direct connection to the ICD
module, or the ICD header can be used to plug into a DIP socket.
The ICD
header contains a target microcontroller and a modular jack to connect to the
ICD module. Male 40- and 28-pin DIP headers are provided to plug into a target
circuit board. The ICD header may be plugged into either the included ICD demo
board or the user's custom hardware.
The demo
board provides 40- and 28-pin DIP sockets that will accept either a
microcontroller device or the ICD header. It also offers LEDs, DIP switches, an
analog potentiometer, and a prototyping area.
Immediate
prototype development and evaluation are feasible even if hardware isn't yet
available. The complete hardware development system, along with the host
software, provides a powerful run-time development tool at a very reasonable
price.
Run-time operation
The debug
kernel is downloaded along with the target firmware via the ICSP interface. A
nonmaskable interrupt vectors execution to the kernel under three conditions:
when the program counter equals a preselected hardware breakpoint address,
after a single step, or when a halt command is received from MPLAB.
As with
all interrupts, this pushes the return address onto the stack. On reset, the
breakpoint register is set equal to the reset vector, so the kernel is entered
immediately when the device comes out of any reset.
The ICD
module issues a reset to the target microcontroller immediately after a
download. Thus, after a download the kernel is entered, and control is passed
to the host.
The user
can now issue commands to the target processor and modify or interrogate all
RAM registers, including the PC and other special function registers. The user
can single-step, set a breakpoint, animate, or start full-speed execution.
Once
started, a halt of program execution causes the PC address prior to kernel
entry to be stored, which allows the software to display where execution halted
in the source code. When the host is commanded to run again, the kernel code
executes a return from interrupt instruction, and execution continues at the
address that pops off the hardware stack.
Silicon support requirements
The
breakpoint address register and comparator make up most of what is needed in
silicon, along with some logic to single-step and recognize asynchronous
commands from the host. Since the ICSP programming interface is already in
place to support programming of the device, this doesn't constitute an
additional silicon requirement. When this channel is used for in-circuit debug,
these two I/O pins may not be used for other run-time functions.
Related Topics