Chapter: Embedded Systems Design
What is an embedded system?
What is an embedded system?
Whenever the word microprocessor is mentioned, it con-jures up a picture
of a desktop or laptop PC running an application such as a word processor or a
spreadsheet. While this is a popular application for microprocessors, it is not
the only one and the fact is most people use them indirectly in common objects
and appli-ances without realising it. Without the microprocessor, these
products would not be as sophisticated or cheap as they are today.
The embedding of microprocessors into equipment and consumer appliances
started before the appearance of the PC and consumes the majority of
microprocessors that are made today. In this way, embedded microprocessors are
more deeply ingrained into everyday life than any other electronic circuit that
is made. A large car may have over 50 microprocessors controlling functions
such as the engine through engine management systems, brakes with electronic
anti-lock brakes, transmission with traction con-trol and electronically
controlled gearboxes, safety with airbag systems, electric windows,
air-conditioning and so on. With a well-equipped car, nearly every aspect has
some form of elec-tronic control associated with it and thus a need for a
microproc-essor within an embedded system.
A washing machine may have a microcontroller that con-tains the
different washing programs, provides the power control for the various motors
and pumps and even controls the display that tells you how the wash cycles are
proceeding.
Mobile phones contain more processing power than a desk-top processor of
a few years ago. Many toys contain microproces-sors and there are even kitchen
appliances such as bread machines that use microprocessor-based control systems.
The word control is very apt for embedded systems because in virtually every
embedded system application, the goal is to control an aspect of a physical
system such as temperature, motion, and so on using a variety of inputs. With
the recent advent of the digital age replac-ing many of the analogue
technologies in the consumer world, the dominance of the embedded system is
ever greater. Each digital consumer device such as a digital camera, DVD or MP3
player all depend on an embedded system to realise the system. As a result, the
skills behind embedded systems design are as diverse as the systems that have
been built although they share a common heritage.
What is an embedded system?
There are many definitions for this but the best way to define it is to
describe it in terms of what it is not and with examples of how it is used.
An embedded system is a microprocessor-based system that is built to
control a function or range of functions and is not designed to be programmed
by the end user in the same way that a PC is. Yes, a user can make choices
concerning functionality but cannot change the functionality of the system by
adding/replac-ing software. With a PC, this is exactly what a user can do: one
minute the PC is a word processor and the next it’s a games machine simply by
changing the software. An embedded system is designed to perform one particular
task albeit with choices and different options. The last point is important
because it differenti-ates itself from the world of the PC where the end user
does reprogram it whenever a different software package is bought and run.
However, PCs have provided an easily accessible source of hardware and software
for embedded systems and it should be no surprise that they form the basis of
many embedded systems. To reflect this, a very detailed design example is
included at the end of this book that uses a PC in this way to build a
sophisticated data logging system for a race car.
If this need to control the physical world is so great, what is so
special about embedded systems that has led to the widespread use of
microprocessors? There are several major reasons and these have increased over
the years as the technology has progressed and developed.
Replacement for discrete logic-based circuits
The microprocessor came about almost by accident as a programmable
replacement for calculator chips in the 1970s. Up to this point, most control
systems using digital logic were imple-mented using individual logic integrated
circuits to create the design and as more functionality became available, the
number of chips was reduced.
This was the original reason for a replacement for digital systems
constructed from logic circuits. The microprocessor was originally developed to
replace a mass of logic that was used to create the first electronic
calculators in the early 1970s. For exam-ple, the early calculators were made
from discrete logic chips and many hundreds were needed just to create a simple
four function calculator. As the integrated circuit developed, the individual
logic functions were integrated to create higher level functions. Instead of
creating an adder from individual logic gates, a com-plete adder could be
bought in one package. It was not long before complete calculators were
integrated onto a single chip. This enabled them to be built at a very low cost
compared to the original machines but any changes or improvements required that
a new chip be developed. The answer was to build a chip that had some form of
programmable capability within it. Why not build a chip that took data in,
processed it and sent it out again? In this way, instead of creating new
functions by analysing the gate level logic and modifying it — a very
time-consuming process — new products could be created by changing the program
code that processed the information. Thus the microprocessor was born.
Provide functional upgrades
In the same way that the need to develop new calculator chips faster and
with less cost prompted the development of the first microprocessors, the need
to add or remove functionality from embedded system designs is even more
important. With much of the system’s functionality encapsulated in the software
that runs in the system, it is possible to change and upgrade systems by
changing the software while keeping the hardware the same. This reduces the
cost of production even lower because many different systems can share the same
hardware base.
In some cases, this process is not possible or worthwhile but allows the
manufacturer to develop new products far quicker and faster. Examples of this
include timers and control panels for domestic appliances such as VCRs and
televisions.
In other cases, the system can be upgraded to improve functionality.
This is frequently done with machine tools, tel-ephone switchboards and so on.
The key here is that the ability to add functionality now no longer depends on
changing the hard-ware but can be done by simply changing the software. If the
system is connected to a communications link such as a telephone or PC network,
then the upgrade can be done remotely without having to physically send out an
engineer or technician.
Provide easy maintenance upgrades
The same mechanism that allows new functionality to be added through
reprogramming is also beneficial in allowing bugs to be solved through changing
software. Again it can reduce the need for expensive repairs and modifications
to the hardware.
Improves mechanical performance
For any electromechanical system, the ability to offer a finer degree of
control is important. It can prevent excessive mechanical wear, better control
and diagnostics and, in some cases, actually compensate for mechanical wear and
tear. A good example of this is the engine management system. Here, an embedded
microproc-essor controls the fuel mixture and ignition for the engine and will
alter the parameters and timing depending on inputs from the engine such as
temperature, the accelerator position and so on. In this way, the engine is
controlled far more efficiently and can be configured for different environments
like power, torque, fuel efficiency and so on. As the engine components wear,
it can even adjust the parameters to compensate accordingly or if they are
dramatically out of spec, flag up the error to the driver or indicate that
servicing is needed.
This level of control is demonstrated by the market in ‘chipped’ engine
management units where third party companies modify the software within the
control unit to provide more power or torque. The differences can range from
10% to nearly 50% for some turbo charged engines! All this from simply
chang-ing a few bytes. Needless to say, this practice may invalidate any
guarantee from the manufacturer and may unduly stress and limit the engine’s
mechanical life. In some cases, it may even infringe the original
manufacturer’s intellectual property rights.
Protection of intellectual property
To retain a competitive edge, it is important to keep the design
knowledge within the company and prevent others from understanding exactly what
makes a product function. This knowl-edge, often referred to as IPR
(intellectual property rights), be-comes all important as markets become more
competitive. With a design that is completely hardware based and built from
off-the-shelf components, it can be difficult to protect the IPR that was used
in its design. All that is needed to do is to take the product, identify the
chips and how they are connected by tracing the tracks on the circuit board.
Some companies actually grind the part numbers off the integrated circuits to make
it harder to reverse engineer in this way.
With an embedded system, the hardware can be identified but the software
that really supplies the system’s functionality can be hidden and more
difficult to analyse. With self-contained microcontrollers, all that is visible
is a plastic package with a few connections to the outside world. The software
is already burnt into the on-chip memory and is effectively impossible to
access. As a result, the IPR is much more secure and protected.
Replacement for analogue circuits
The movement away from the analogue domain towards digital processing
has gathered pace recently with the advent of high performance and low cost
processing.
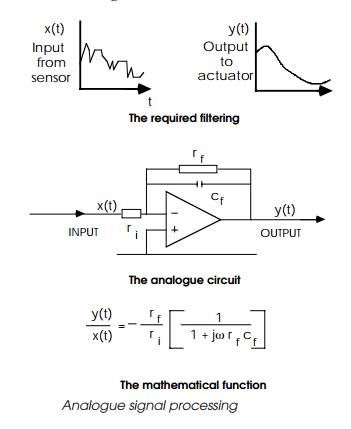
To understand the advantages behind digital signal process-ing, consider
a simple analogue filter. The analogue implementa-tion is extremely simple
compared to its digital equivalent. The analogue filter works by varying the
gain of the operational amplifier which is determined by the relationship
between ri and rf.
In a system with no frequency component, the capacitor ci plays no part as its impedance is far greater than that of rf. As the frequency component increases,
the capacitor impedance de-creases until it is about equal with rf where the effect will be to reduce the
gain of the system. As a result, the amplifier acts as a low pass filter where
high frequencies will be filtered out. The equation shows the relationship
where jω is the
frequency compo-nent. These filters are easy to design and are cheap to build.
By making the CR (capacitor-resistor) network more complex, differ-ent filters
can be designed.
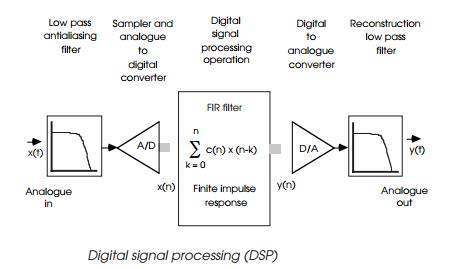
The digital equivalent is more complex requiring several electronic
stages to convert the data, process it and reconstitute the data. The equation
appears to be more involved, comprising of a summation of a range of
calculations using sample data multi-plied by a constant term. These constants
take the place of the CR components in the analogue system and will define the
filter’s transfer function. With digital designs, it is the tables of
coeffi-cients that are dynamically modified to create the different filter
characteristics.
Given the complexity of digital processing, why then use it? The
advantages are many. Digital processing does not suffer from component ageing,
drift or any adjustments which can plague an analogue design. They have high
noise immunity and power supply rejection and due to the embedded processor can
easily provide self-test features. The ability to dynamically modify the
coefficients and therefore the filter characteristics allows complex filters
and other functions to be easily implemented. However, the processing power
needed to complete the ‘multiply–accumulate’ processing of the data does pose
some interesting processing requirements.
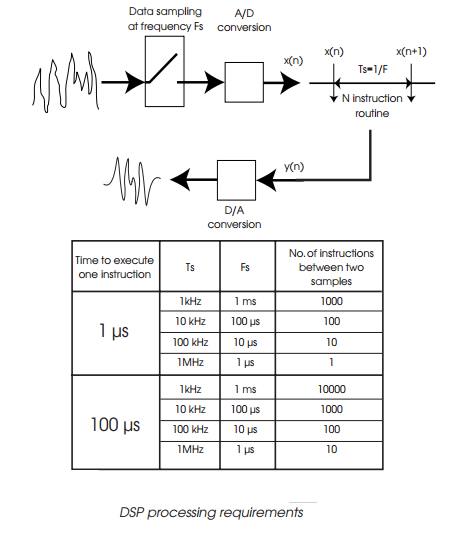
The diagram shows the problem. An analogue signal is sampled at a
frequency fs and is converted by the
A/D converter. This frequency will be first determined by the speed of this
conversion. At every period, ts,
there will be a new sample to process using N
instructions. The table shows the relationship between sampling speed, the
number of instructions and the instruction execution time. It shows that the
faster the sampling frequency, the more processing power is needed. To achieve
the 1 MHz frequency, a 10 MIPS processor is needed whose instruction set is
powerful enough to complete the processing in under 10 instructions. This
analysis does not take into account A/D conver-sion delays. For DSP algorithms,
the sampling speed is usually twice the frequency of the highest frequency
signal being proc-essed: in this case the 1 MHz sample rate would be adequate
for signals up to 500 kHz.
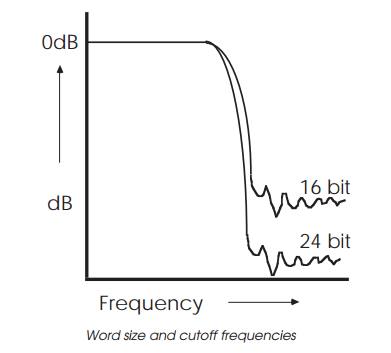
One major difference between analogue and digital filters is the
accuracy and resolution that they offer. Analogue signals may have definite
limits in their range, but have infinite values be-tween that range. Digital
signal processors are forced to represent these infinite variations within a
finite number of steps deter-mined by the number of bits in the word. With an 8
bit word, the increases are in steps of 1/256 of the range. With a 16 bit word,
such steps are in 1/65536 and so on. Depicted graphically as shown, a 16 bit
word would enable a low pass filter with a roll-off of about 90 dB. A 24 bit
word would allow about 120 dB roll-off to be achieved.
DSP can be performed by ordinary microprocessors, al-though their more
general-purpose nature often limits perform-ance and the frequency response.
However, with responses of only a few hundred Hertz, even simple
microcontrollers can perform such tasks. As silicon technology improved,
special build-ing blocks appeared allowing digital signal processors to be
developed, but their implementation was often geared to a hard-ware approach
rather than designing a specific processor architec-ture for the job. It is now
common for processors to claim DSP support through enhanced multiply–accumulate
operations or through special accelerators. It is clear though, that as general
purpose processing increases in capability, what was once the sole province of
a DSP can now be achieved by a general purpose processor.
Related Topics