Chapter: Embedded Systems
Embedded Operating System
EMBEDDED
OPERATING SYSTEM
Chapter
Structure
Objectives
1. Introduction
2. Basics
2.1 Tasks
2.2 Task
States
3. Scheduler
3.1 Scheduling
Points
3.2 Ready
List
3.3 Idle
task
4. Context Switch
5. Task Synchronization
6. Real Time Characteristic
7. Selection Process
OBJECTIVES
After reading this chapter you will learn:
The basics of embedded Operating system with
respect to
Tasks
Task States
Scheduler with respect to:
Scheduling Points
Ready List
Idle task
Concept of Context Switch and Task
Synchronization
Real
Time Characteristic of embedded operating system.
1 INTRODUCTION
This chapter introduces the readers to the
embedded operating system. Any operating system has a set of programs which are
implemented through a set of tasks.
Every embedded system may not require an
operating system. The requirement and complexity on an operating system depends
on the functionality to be implemented by the embedded system.
2
BASICS
2.1
Tasks
In embedded systems, the operating system has to
deal with a limited number of tasks depending on the functionality to be
implemented in the embedded system.
Multiple tasks are not executed at the same time
instead they are executed in pseudo parallel i.e. the tasks execute in turns as
the use the processor.
From a multitasking point of view, executing
multiple tasks is like a single book being read by multiple people, at a time
only one person can read it and then take turns to read it. Different bookmarks
may be used to help a reader identify where to resume reading next time.
An Operating System decides which task to
execute in case there are multiple tasks to be executed. The operating system
maintains information about every task and information about the state of each
task.
The information about a task is recorded in a
data structure called the task context. When a task is
executing, it uses the processor and the registers available for all sorts of
processing. When a task leaves the processor for another task to execute before
it has finished its own, it should resume at a later time from where it stopped
and not from the first instruction. This requires the information about the
task with respect to the registers of the processor to be stored somewhere.
This information is recorded in the task context.
A C++ version of a Task that holds all
information needed by operating system is as follows:
class Task
{
public:
Task(void (*function)(), Priority p, int
stackSize);
TaskId id;
Context context;
TaskState state;
Priority priority;
int * pStack; Task * pNext;
void (*entryPoint)();
private:
static TaskId nextId;
};
In an operation system there are always multiple
tasks. At a time only one task can be executed. This means that there are other
tasks which are waiting their turn to be executed.
Depending upon execution or not a task may be
classified into the following three states:
Running
state - Only one task can
actually be using the processor at a
given time that task is said to be the “running” task and its state is “running
state”. No other task can be in that same state at the same time
Ready
state - Tasks that are are
not currently using the processor
but are ready to run are in the “ready” state. There may be a queue of tasks in
the ready state.
Waiting
state - Tasks that are neither
in running nor ready state but that
are waiting for some event external to themselves to occur before the can go
for execution on are in the “waiting” state.
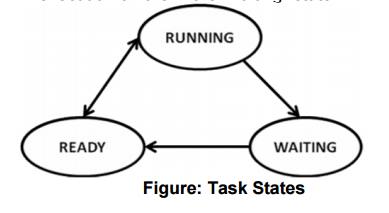
A transition of state between the ready and
running state occurs whenever the operating system selects a new task to run.
The task that was previously in running state
becomes ready and the new task is promoted to running state.
A task will leave running state only if it needs
to wait for some event external to itself to occur before continuing.
A task's state can be defined as follows:
enum TaskState { Ready, Running, Waiting };
3
SCHEDULER
The heart and soul of any operating system is
its scheduler.
This is the piece of the operating system that
decides which of the ready tasks has the right to use the processor at a given
time.
It simple checks to see if the running task is
the highest priority ready task.
Some of the more common scheduling algorithms:
First-in-first-out
First-in-first-out (FIFO) scheduling describes
an operating system which is not a multitasking operating system.
Each task runs until it is finished, and only
after that is the next task started on a first come first served basis.
Shortest
job first
Shortest job first scheduling uses algorithms
that will select always select a task that will require the least amount of
processor time to complete.
Round
robin.
Round robin scheduling uses algorithms that
allow every task to execute for a fixed amount to time.
A running task is interrupted an put to a
waiting state if its execution time expires.
3.1
Scheduling Points
The scheduling points are the set of operating
system events that result in an invocation of the scheduler.
There are three such events: task creation and task deletion. During
each of these events a method is called to
select the next task to be run.
A third scheduling point called the clock tick is a periodic event that is
triggered by a timer interrupt. When a timer expires, all of the tasks that are
waiting for it to complete are changed from the waiting state to the ready
state.
3.2
Ready List
The scheduler uses a data structure called the ready list to track the tasks that are
in the ready state.
The ready list is implemented as an ordinary
linked list, ordered by priority.
So the head of this list is always the highest
priority task that is ready to run.
3.3
Idle task
If there are no tasks in the ready state when
the scheduler is called, the idle task will be executed.
The idle task looks the same in every operating
system.
The idle task is always considered to be in the
ready state.
4 CONTEXT
SWITCH
The actual process of changing from one task to
another is called Context Switch.
Since contexts
are processor-specific, so is the code that implements the context
switches, hence, it must always be written
in assembly language.
5 TASK
SYNCHRONIZATION
All the tasks in the multitasking operating
systems work together to solve a larger problem and to synchronize their
activities, they occasionally communicate with one another.
For example, in the printer sharing device the
printer task doesn’t have any work to do until new data is supplied to it by
one of the computer tasks.
So the printer and the computer tasks must
communicate with one another to coordinate their access to common data buffers.
One way to do this is to use a data structure called a mutex.
Mutexes are mechanisms provided by many
operating systems to assist with task
synchronization.
A mutex is a
multitasking-aware binary flag. It is because the processes of setting and
clearing the binary flag are atomic (i.e.
these operations cannot be interrupted).
When this binary flag is set, the shared data
buffer is assumed to be in use by one of the tasks. All other tasks must wait
until that flag is cleared before reading or writing any of the data within
that buffer.
The atomicity of the mutex set and clear
operations is enforced by the operating system, which disables interrupts
before reading or modifying the state of the binary flag.
6 REAL
TIME CHARACTERISTIC
An Operating system is called “Real-Time
Operating System” (RTOS) only if it has following characteristics:
Deterministic
An OS is said to be deterministic if the worst
case execution time of each of the system calls is calculable.
The data sheet of an OS should publish the
real-time behavior of its RTOS provides average, minimum and maximum number of
clock cycles required by each system call.
Interrupt
Latency
Interrupt Latency is the total length of time
from an interrupt signal’s arrival at the processor to the start of the
associated interrupt service routine.
iii.Context
Switch
Context Switch is important because it
represents overhead across your entire system.
7 SELECTION
PROCESS
The process of selecting the best commercial
operating system that best fits the needs of one’s project depends on various
factors.
Commercial operating systems form a continuum of
functionality, performance and price.
Operating Systems that offer only a basic
scheduler and a few other system calls are inexpensive and come with the source
code that one can modify and do not require payment of royalties.
While on the other hand operating systems that
include a lot of useful functionality beyond just the scheduler are quite
expensive and royalties due on every copy shipped in ROM and they might also
make a stronger guarantees about real-time performance.
Two important points to be considered while
selecting an operating system :-
Put your processor, real time performance and
budgetary requirements first.
Contact all of the vendors of the remaining
operating systems for more detailed technical information.
Related Topics