Chapter: Embedded Systems
Real Time Operating System Programming
Real Time Operating System Programming
mC/OS-II andVxWorks
Kernel of an RTOS
• Used for
real-time programming features to meet hard and soft real time constraints,
• Provides
for preemption points atkernel, user controlled dynamic priority changes, fixed
memory blocks, asynchronous IOs, user processes inkernel space and other
functions for asystem.
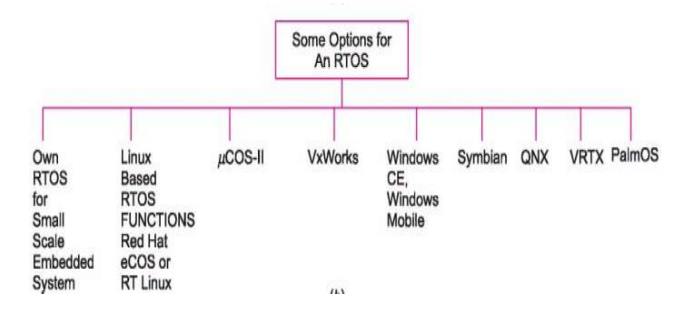
Common options available for selecting
an RTOS
Complex multitasking embedded system design
requirements
·
Integrated Development Environment,
·
Multiple task functions in Embedded C or Embedded
C++,
·
Real time clock─ hardware and software timers,
·
Scheduler,
·
Device drivers and device manager,
·
Functions for inter inter-process communications
using the signals, event flag group, semaphore- handling functions, functions
for the queues, mailboxes, pipe, and sockets,
·
Additional functions for example, TCP/IPor USB
port, other networking functions,
·
Error handling functions and Exception handling
functions, and
·
Testing and system debugging software for testing
RTOS as well as developed embedded application
Basic functions expected from kernel of an RTOS
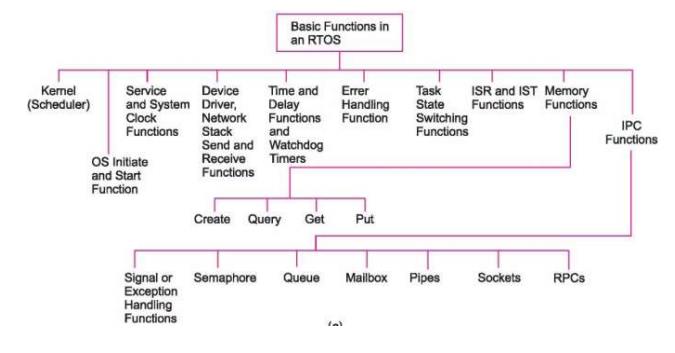
RTOS features in general
·
Basic kernel functions and scheduling: Preemptive
or Preemptive plus time slicing
·
Support to Limited Number of tasks and threads
·
Task priorities and Inter Service Threads priorities
definitions
·
Priority Inheritance feature or option of priority
ceiling feature
·
Task synchronization and IPC functions
·
Support to task and threads running in kernel space
·
IDE consisting of editor, platform builder, GUI and
graphics software, compiler, debugging and host target support tools
·
Device Imaging tool and device drivers
·
Clock, time and timer functions,
·
Support to POSIX,
·
Asynchronous IOs,
·
Fixed memory blocks allocation and deal location
system,
·
Support to different file systems and flash memory
systems
·
TCP/IP protocols, network and buses protocols,
·
Development environment with Java
·
Componentization (reusable modules for different
functions), which leads to small footprint (small of size of RTOS codes placed in
ROM image)
·
Support to number of processor architectures, such
as INTEL, ARM, Philips, …
Development Approaches
Host and
Target Based Development Approach:
·
A host machine (Computer) for example, a PCuses a
general purpose OS, for example, Windowsor Unix for system development. The
target connects by a network protocol for example TCP/IP during the development
phase. The developed codes and the target RTOS functions first connect a
target. The target with downloaded codes finally disconnects and contains a
small size footprint of RTOS. For example, the target does not download host
machine resident compiler, cross compiler, editor for programs, simulation and
debugging programs, and MMU support.
Self-host
Based Development Approach:
·
Same system with full RTOS is used for development
on which the application will be running. This also does not require cross compilation.
When application codes are ready, the required RTOS functions codes and
application codes are downloaded into the ROM of the target board
Types of RTOSes
1. In-House
Developed RTOSes
2. Broad
based Commercial RTOSes
3. General
Purposes OSes with RTOS
4. Special
Focus RTOSes
μC/OS-II System level and task Functions
·
void OSInit
(void)At the beginning prior to the OSStart( )
·
void OSStart
(void)After OSInit ( ) and task-creating function(s)
·
void OSTickInit
(void)In first task function that executes once.Initializes the system timer
ticks (RTCinterrupts)
Interrupt Service Task (ISR) Start andEnd
·
OSIntEnter
( ) and OSIntExit ( )
·
Function void OSIntEnter (void)─ used at the start
of ISRFor sending a message to RTOS kernel fortaking control─ compulsory to let
OS kernel control the nesting of the ISRs in case of occurrences of multiple
interrupts of varying priorities.
·
Function void OSIntExit (void)─ used just before
the return from the runningISR─ For sending a message to RTOS kernel
forquitting control of presently running ISR
Critical Section Start and End
·
OS_ENTER_CRITICAL
§ Macro to
disable interrupts before acritical section
§ Used at
the start of a ISR or task - for sending a message to RTOS kernel and disabling
the interrupts
§ Use
compulsory when the OS kernel is to take note of and disable the interrupts of
the system
·
OS_EXIT_CRITICAL─ Macro to enable interrupts.
[ENTER and EXIT functions form a pair in the critical section]
§ used at
the end of critical section
§ for
sending a message to RTOS kernel and enabling the interrupts
§ Use is
compulsory to OS kernel for taking note of and enables the disabled interrupts.
Function
void OSTickInit (void)
─ is used
to initiate the system clockticks and interrupts at regular intervals asper
OS_TICKS_PER_SEC predefined when defining configuration of MUCOS
Task Service Functions
·
Service functions mean the functions of
multitasking service (task create, suspend or resume), time setting andtime
retrieving (getting) functions.
OSTaskCreate
§ unsigned
byte OSTaskCreate (void(*task) (void
*taskPointer), void*pmdata, OS_STK*taskStackPointer, unsigned
bytetaskPriority)Called for creating a task.
Macro
OS_TASK_CREATE_EN
§ Must be
preprocessor directive to enableinclusion of task management functionsby
MUCOS
OSTaskSuspend and OSTaskResume
·
unsigned byte OSTaskSuspend(unsigned byte
taskPriority)
§ Called
for blocking a task
·
unsigned byte OSTaskResume(unsigned byte
taskPriority)
Called
for resuming a blocked task
System Time and Time DelayFunctions
• void
OSTimeSet (unsigned intcounts) Used
when system time is to be set bycounts
OSTimeGet( ) and OS TimeDly(delay Count)
•
unsigned int OSTimeGet (void)
to find
present counts when system time is read.
• void
OSTimeDly (unsigned short delay Count)
To delay
a task by period of count-input sequal to delay Count -1
OSTimeDlyHMSM
void
OSTimeDlyHMSM (unsigned bytehr, unsigned byte mn, unsigned byte sec, unsigned
short ms)
OSTimeDlyResume
•
unsigned byte OSTimeDly Resume(unsigned byte task Priority)
When a
task of priority = task Priority is to resume before the preset delay, which
was bya value defined either by delay Count or (hr,mn and ms) and which is in
blocked state now.
Macros to find status after execution of OS Time
Delay Functions
• OS_NO_ERR,
when our arguments are valid and resumption after delay succeeds.
• OS_TIME_INVALID_HOURS,
• OS_TIME_INVALID_MINUTES,
• OS_TIME_INVALID_SECONDS
and
• OS_TIME_INVALID_MILLI,
returns true
• OS_TIME_ZERO_DLY,
returns true ifall the arguments passed are 0.
• OS_NO_ERR
returns true if all the arguments passed or when resumption after delay
succeeds.
• OS_TASK_NOT_EXIST
returns true ,if task was not created earlier.
• OS_TIME_NOT_DLY
returns true, if the task was not
delayed.
• (vi)
OS_PRIO_INVALID returns true, when task Priority parameter that was passed is
more than the OS_PRIO_LOWEST (23)when maximum number of user tasks = 8
Memory Allocation RelatedFunctions
OSMemCreate
OSMemPut
(*memCBPointer, *memErr)
OSMemGet
(*memCBPointer, *memErr)
OSMemQuery
(* memCBPointer, *memData)
Semaphore Functions
Provides
for using same semaphorefunctions as an event signaling flagor mutex or
counting semaphore.
OSSemCreate
(semVal)
OSSemPend
(*eventPointer, timeOut,*SemErrPointer) OSSemAccept (*eventPointer)
OSSemPost
(*eventPointer)
OSSem (*eventPointer)
Mailbox Functions
·
Used to communicate a pointer for information.
·
μC/OS-II permits one message-pointerper mailbox.
·
At the pointer, there can be a string or data
structure of no size limit.
·
Assume an event pointer to the mailbox = *mboxMsg,
·
Pointer to the message, *MsgPointer(for retrieving
the message itself).
OSMboxCreate(*mboxMsg)
To create
a mailbox message pointer ECBof a mailbox message.
OSMboxPend(*mboxMsg, timeout,*MboxErr)
To check
if mailbox message not pending(available) then read *mboxMsg is and empty mailbox
[* mboxMsg = NULL again]. If message is not available [*mboxMsg points to
NULL],then wait, suspend the task (block further running) till *mboxMsg not
Null or timeout.
OSMboxAccept (*mboxMsg)
To check
if mailbox message at the*MsgPointer, is available at *mboxMsg.
Unlike
OSMboxPend function, it does notblock (suspend) the task if message is not available.
If available, it returns the pointer.
OSMboxPost (*mboxMsg, *MsgPointer)
─ Sends a
message of task at address MsgPointerby posting the address pointer to the
mboxMsg.
─ If box is
already full (*mboxMsg not Null),then the message is not placed and error
status sent.
OSMboxQuery (*mboxMsg, *mboxData)
─ To get
mailbox error information
─ Pointer
Null or Not Null,
Queue Functions
• The
message pointers post into a queue by the tasks either at the back as in a queue or at the front as in a stack.
• A task
can thus insert a given message for deleting either in the first in firstout (FIFO) mode or in priority mode for priority message.
• Assume
pointer, **Qtop, to a queue of pointers for the messages and
• Assume
two pointers, *QfrontPointerand *QbackPointer to insert (post) and delete
(retrieve), respectively, thepointer of the message.
Functions
OSQCreate
(**QTop, qSize)
OSQPost
(*QMsgPointer, *QMsg)
OSQPostFront
(*QMsgPointer, *QMsg)
OSQPend
(*QMsgPointer, timeOut, *Qerr)
OSQFlush(*QMsgPointer)
OSQQuery
(*QMsgPointer, *QData)
IPC Objects
·
For which there is waiting process or thread
·
A process (thread or scheduler, task orISR)
generates some information by or value and sends event or semaphore or message
into queue or a single IPC or multiple objects as output so that it letsanother
process waiting for that object in order to take note or use the object.
·
A process waits for an IPC or object (s)in order to
take note or use the object(s)
IPC Object Functions
Wait For Sing leObject
Wait For Multiple Objects
Related Topics