Chapter:
Real Time Operating Systems
REAL
TIME OPERATING SYSTEMS
Process Concepts
·
A process consists of executable program (codes), state of which is controlled by OS, the state during running of a process
represented by process-status (running, blocked, or finished), process
structure—its data, objects and resources, and process control block (PCB).
·
Runs when it is scheduled to run by the OS (kernel)
·
OS gives the control of the CPU on a process‘s
request (system call).
·
Runs by executing the instructions and the
continuous changes of its state takes
Place as
the program counter (PC) changes.
process
at OS for a resource management mechanism that lets it use the system-memory
and other system resources such as network, file, display or printer.
Application program can be said to consist of
number of processes
Example - Mobile Phone Device embedded software
·
Software highly complex.
·
Number of functions, ISRs, processes threads,
multiple physical and virtual device drivers, and several program objects that
must be concurrently processed on a single processor.
·
Voice encoding and convoluting process─ the device
captures the spoken words through a speaker and generates the digital signals
after analog to digital conversion, the digits are encoded and convoluted using
a CODEC,
·
Modulating process,
·
Display process,
·
GUIs (graphic user interfaces), and
·
Key input process ─ for provisioning of the user
interrupts
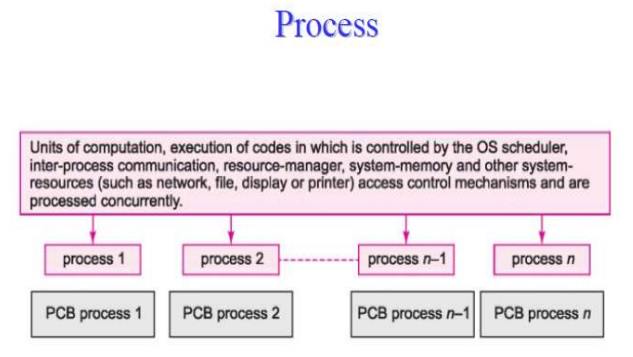
Process Control Block
·
A data structure having the information using which
the OS controls the Process state.
·
Stores in protected memory area of the kernel.
·
Consists of the information about the process state
Information about the process state at Process
Control Block…
·
Process ID,
·
process priority,
·
parent process (if any),
·
child process (if any), and
·
address to the next process PCB which will run,
·
allocated program memory address blocks in physical
memory and in secondary (virtual) memory for the process-codes,
·
allocated process-specific data address blocks
·
allocated process-heap (data generated during the
program run) addresses,
·
allocated process-stack addresses for the functions
called during running of the process,
·
allocated addresses of CPU register-save area as a
process context represents by CPU registers, which include the program counter
and stack pointer
·
allocated addresses of CPU register-save area as a
process context [Register-contents (define process context) include the program
counter and stack pointer contents]
·
process-state signal mask [when mask is set to 0
(active) the process is inhibited from running and when reset to 1, the process
is allowed to run],
·
Signals (messages) dispatch table [process IPC
functions],
·
OS allocated resources‘ descriptors (for example,
file descriptors for open files, device descriptors for open (accessible)
devices, device-buffer addresses and status, socket-descriptor for open
socket), and
·
Security restrictions and permissions.
Context
·
Context loads into the CPU registers from memory
when process starts running, and the registers save at the addresses of
register-save area on the context switch to another process
·
The present CPU registers, which include program
counter and stack pointer are called context
·
When context saves on the PCB pointed process-stack
and register-save area addresses, then the running process stops.
·
Other process context now loads and that process
runs─ This means that the context has switched.
Threads and Tasks
Thread
Concepts
·
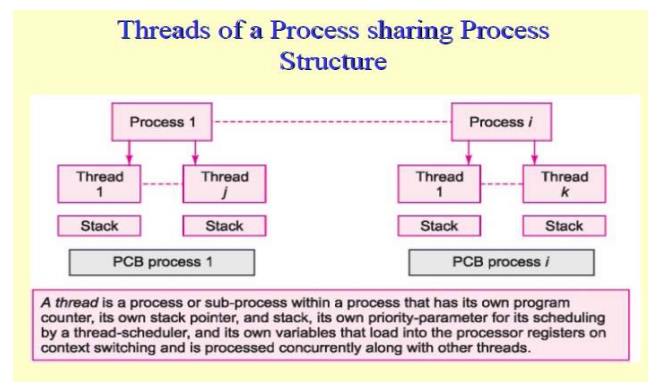
A thread consists of executable program (codes), state of which is controlled by OS,
·
The state information─ thread-status (running, blocked, or finished), thread structure—its data, objects and a subset of the process
resources, and thread-stack.
Considered a lightweight process and a process level controlled entity.[Light
weight means its running does not depend on system resources] .
Process…
heavyweight
•
Process considered as a heavyweight process and a
kernel-level controlled entity.
•
Process thus can have codes in secondary memory
from which the pages can be swapped into the physical primary memory during
running of the process. [Heavy weight means its running may depend on system
resources]
•
May have process structure with the virtual memory
map, file descriptors, user–ID, etc.
•
Can have multiple threads, which share the process
structure thread
•
A process
or sub-process within a process that has its own program counter, its own stack pointer and stack, its own
priority parameter for its scheduling by a thread scheduler
•
Its‘ variables that load into the processor
registers on context switching.
•
Has own signal mask at the kernel. Thread‘s signal
mask
•
When unmasked lets the thread activate and run.
•
When masked, the thread is put into a queue of
pending threads.
Thread‘s
Stack
A thread
stack is at a memory address block allocated by the OS.
Application program can be said to consist of
number of threads or Processes:
Multiprocessing OS
•
A multiprocessing OS runs more than one processes.
•
When a process consists of multiple threads, it is
called multithreaded process.
•
A thread can be considered as daughter process.
•
A thread defines a minimum unit of a multithreaded
process that an OS schedules onto the CPU and allocates other system resources.
Thread parameters
•
Each thread has independent parameters ID,
priority, program counter, stack pointer, CPU registers and its present status.
•
Thread states─ starting, running, blocked (sleep)
and finished
Thread’s stack
•
When a function in a thread in OS is called, the
calling function state is placed on the stack top.
•
When there is return the calling function takes the
state information from the stack top
•
A data structure having the information using which
the OS controls the thread state.
•
Stores in protected memory area of the kernel.
•
Consists of the information about the thread state
Thread and Task
•
Thread is a concept used in Java or Unix.
•
A thread can either be a sub-process within a
process or a process within an application program.
•
To schedule the multiple processes, there is the
concept of forming thread groups and thread libraries.
•
A task is a process and the OS does the multitasking.
•
Task is a kernel-controlled entity while thread is
a process-controlled entity.
•
A thread does not call another thread to run. A
task also does not directly call another task to run.
•
Multithreading needs a thread-scheduler.
Multitasking also needs a task-scheduler.
•
There may
or may not be task groups and task libraries in a given OS
Task and Task States
Task Concepts
•
An application program can also be said to be a
program consisting of the tasks and task behaviors in various states that are
controlled by OS.
•
A task is like a process or thread in an OS.
•
Task─ term used for the process in the RTOSes for
the embedded systems. For example, VxWorks and μCOS-II are the RTOSes, which
use the term task.
•
A task consists of executable program (codes), state of which is controlled by
OS, the state during running of a task
represented by information of process status (running, blocked, or
finished),process-structure—its data, objects and resources, and task control
block (PCB).
•
Runs when it is scheduled to run by the OS
(kernel), which gives the control of the CPU on a task request (system call) or
a message.
•
Runs by executing the instructions and the
continuous changes of its state takes place as the program counter (PC)
changes.
•
Task is that executing unit of computation, which
is controlled by some process at the OS scheduling mechanism, which lets it
execute on the CPU and by some process at OS for a resource-management
mechanism that lets it use the system memory and other system-resources such as
network, file, display or printer.
•
A task─ an independent process.
•
No task can call another task. [It is unlike a C
(or C++) function, which can call another function.]
•
The task─ can send signal (s) or message(s) that
can let another task run.
•
The OS can only block a running task and let
another task gain access of CPU to run the servicing codes

Task States
(i) Idle
state [Not attached or not registered]
(ii) Ready
State [Attached or registered]
(iii) Running
state
(iv)Blocked
(waiting) state
(v) Delayed
for a preset period
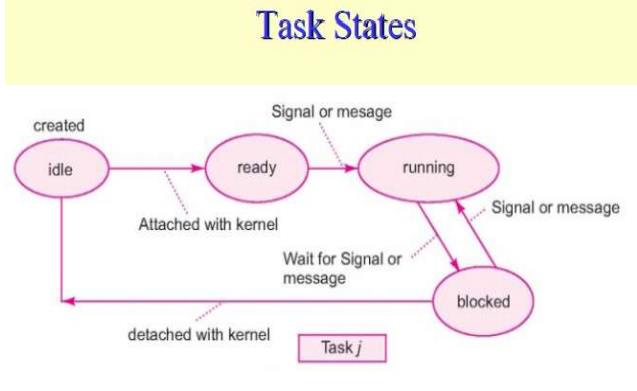
Idle (created) state
The task
has been created and memory allotted to its structure however, it is not ready
and is not schedulable by kernel.
Ready (Active) State
•
The created task is ready and is schedulable by the
kernel but not running at present as another higher priority task is scheduled
to run and gets the system resources at this instance.
Running state
• Executing
the codes and getting the system resources at this instance. It will run till it needs some IPC (input) or wait for an event
or till it gets pre-empted by another higher priority task than this one.
•
Blocked (waiting) state
• Execution
of task codes suspends after saving the needed parameters into its Context. It
needs some IPC (input) or it needs to wait for an event or wait for higher
priority
task to block to enable running after blocking.
Deleted (finished) state
• Deleted
Task─ The created task has memory deallotted to its structure. It frees the
memory. Task has to be re-created.
Function
• Function
is an entity used in any program, function, task or thread for performing
specific set of actions when called and on finishing the action the control
returns to the function calling entity (a calling function or task or process
or thread).
• Each
function has an ID (name)
• has
program counter and
• has its
stack, which saves when it calls another function and the stack restores on
return to the caller.
•
Functions can be nested. One function call another,
that can call another, and so on and later the return is in reverse order
Memory Management Functions
Memory allocation
·
when a process is created, the memory manager
allocates the memory addresses (blocks) to it by mapping the process address
space.
·
Threads of a process share the memory space of the
process
·
Memory manager of the OS─ secure, robust and well
protected.
·
No memory leaks and stack overflows
·
Memory leaks means attempts to write in the memory
block not allocated to a process or data structure.
·
Stack overflow means that the stack exceeding the
allocated memory block(s)
Memory Management after Initial Allocation
Memory Managing Strategy for a system
·
Fixed-blocks allocation
·
Dynamic -blocks Allocation
·
Dynamic Page-Allocation
·
Dynamic Data memory Allocation
·
Dynamic address-relocation
·
Multiprocessor Memory Allocation
·
Memory Protection to OS functions
Memory allocation in RTOSes
·
RTOS may disable the support to the dynamic block
allocation, MMU support to dynamic page allocation and dynamic binding as this
increases the latency of servicing the tasks and ISRs.
·
RTOS may not support to memory protection of the OS
functions, as this increases the latency of servicing the tasks and ISRs.
·
User functions are then can run in kernel space and
run like kernel functions
·
RTOS may provide for disabling of the support to
memory protection among the tasks as this increases the memory requirement for
each task
Memory Manager functions
(i) use of
memory address space by a process,
(ii) specific
mechanisms to share the memory space and
(iii) specific
mechanisms to restrict sharing of a given memory space
(iv)optimization
of the access periods of a memory by using an hierarchy of memory (caches,
primary and external secondary magnetic and optical memories).
Remember
that the access periods are in the following increasing order: caches, primary
and external secondary magnetic and then or optical.
Fragmentation Memory Allocation Problems
Fragmented not continuous memory addresses in two
blocks of a process
·
Time is spent in first locating next free memory
address before allocating that to the process.
·
A standard memory allocation scheme is to scan a
linked list of indeterminate length to find a suitable free memory block.
·
When one allotted block of memory is deallocated,
the time is spent in first locating next allocated memory block before
deallocating that to the process.
·
the time for allocation and de-allocation of the
memory and blocks are variable (not deterministic) when the block sizes are
variable and when the memory is fragmented.
·
In RTOS, this leads to unpredicatble task
performance
Memory management Example
RTOS COS-II
·
Memory partitioning
·
A task must create a memory partition or several
memory partitions by using function OSMemCreate ( )
·
Then the task is permitted to use the partition or
partitions.
·
A partition has several memory blocks.
·
Task consists of several fixed size memory blocks.
·
The fixed size memory blocks allocation and
de-allocation time takes fixed time (deterministic).
·
OSMemGet ( )
─ to
provide a task a memory block or blocks from the partition
·
OSMemPut ( )
─ to
release a memory block or blocks to the partition
Interrupt Service routine
•
ISR is a function called on an interrupt from an
interrupting source.
•
Further unlike a function, the ISR can have
hardware and software assigned priorities.
•
Further unlike a function, the ISR can have mask,
which inhibits execution on the event, when mask is set and enables execution
when mask reset.
Task
•
Task defined as an executing computational unit
that processes on a CPU and state of which is under the control of kernel of an
operating system.
Distinction Between Function, ISR and Task
Uses
•
Function─ for running specific set of codes for
performing a specific set of actions as per the arguments passed to it
•
ISR─ for running on an event specific set of codes
for performing a specific set of actions for servicing the interrupt call.
•
Task ─ for running codes on context switching to it
by OS and the codes can be in endless loop for the event (s)
Calling Source
•
Function─ call from another function or process or
thread or task.
•
ISR─ interrupt-call for running an ISR can be from
hardware or software at any Instance.
•
Task ─ A call to run the task is from the system
(RTOS). RTOS can let another higher priority task execute after blocking the
present one. It is the RTOS (kernel) only that controls the task scheduling.
Context Saving
•
Function─ run by change in program counter
instantaneous value. There is a stack. On the top of which the program counter
value (for the code left without running) and other values (called functions‘
context) save.
•
All function have a common stack in order to
support the nesting
•
ISR─ Each ISR is an event-driven function code. The
code run by change in program counters instantaneous value. ISR has a stack for
the program counter instantaneous value and other values that must save.
•
All ISRs can have common stack in case the OS
supports nesting
•
Task ─ Each task has a distinct task stack at
distinct memory block for the context (program counter instantaneous value and
other CPU register values in task control block) that must save .
•
Each task has a distinct process structure (TCB)
for it at distinct memory block
Response and Synchronization
•
Function─ nesting of one another, a hardware
mechanism for sequential nested mode synchronization between the functions
directly without control of scheduler or OS
•
ISR─ a hardware mechanism for responding to an
interrupt for the interrupt source calls, according to the given OS kernel
feature a synchronizing mechanism for the ISRs, and that can be nesting support
by the OS.
•
ISR─ a hardware mechanism for responding to an
interrupt for the interrupt source calls, according to the given OS kernel
feature a synchronizing mechanism for the ISRs,and that can be nesting support
by the OS
Structure
•
Function─ can be the subunit of a process or thread
or task or ISR or subunit of another function.
•
ISR─ Can be considered as a function, which runs on
an event at the interrupting source.
•
A pending interrupt is scheduled to run using an
interrupt handling mechanism in the OS, the mechanism can be priority based
scheduling.
•
The system, during running of an ISR, can let
another higher priority ISR run.
•
Task ─ is independent and can be considered as a
function, which is called to run by the OS scheduler using a context switching
and task scheduling mechanism of the OS.
•
The system, during running of a task, can let
another higher priority task run. The kernel manages the tasks scheduling
Global Variables Use
•
Function─ can change the global variables. The
interrupts must be disabled and after finishing use of global variable the
interrupts are enabled.
•
ISR─ When using a global variable in it, the
interrupts must be disabled and after finishing use of global variable the
interrupts are enabled (analogous to case of a function).
•
Task ─ When using a global variable, either the
interrupts are disabled and after finishing use of global variable the
interrupts are enabled or use of the semaphores or lock functions in critical
sections, which can use global variables and memory buffers.
Posting and Sending Parameters
•
Function─ can get the parameters and messages
through the arguments passed to it or global variables the references to which
are made by it. Function returns the results of the Operations.
•
ISR─ using IPC functions can send (post) the
signals, tokens or messages. ISR can‘t use the mutex protection of the critical
sections by wait for the signals, tokens or messages.
•
Task ─ can send (post) the signals and messages.
•
can wait for the signals and messages using the IPC
functions, can use the mutex or lock protection of the code section by wait for
the token or lock at the section beginning and messages and post the token or
unlock at the section end.
Semaphore as an event signalling variable or
notifying variable
•
Suppose that there are two trains.
•
Assume that they use an identical track.
•
When the first train A is to start on the track, a
signal or token for A is set (true, taken) and
•
same signal or token for other train, B is reset
(false, not released).
OS Functions for Semaphore as an event signalling
variable or notifying variable:
•
OS Functions provide for the use of a semaphore for
signalling or notifying of certain action or notifying the acceptance of the
notice or signal.
•
Let a binary Boolean variable, s, represents the semaphore. The taken and post operations on s─ (i)signals
or notifies operations for communicating the occurrence of an event and (ii)
for communicating taking note of the event.
•
Notifying variable s is like a token ─ (i)
acceptance of the token is taking note of that event (ii) Release of a token is
the occurrence of an event
Binary Semaphore
•
Let the token (flag for event occurrence) s initial value = 0
•
Assume that the s
increments from 0 to 1 for signalling or notifying occurrence of an event from
a section of codes in a task or thread.
•
When the event is taken note by section in another
task waiting for that event, the s
decrements from 1 to 0 and the waiting task codes start another action.
•
When s = 1─ assumed that it has been released (or
sent or posted) and no task code section has taken it yet.
•
When s = 0 ─ assumed that it has been taken (or
accepted) and other task code
•
section has not taken it yet
Binary
Semaphore use in ISR and Task
•
An ISR can release a token.
•
A task can release the token as well accept the
token or wait for taking the token
Device Management Functions
Number of device driver ISRs in a system,
Each device or device function having s a separate
driver, which is as per its hardware
Software
that manages the device drivers of each device
Provides
and executes the modules for managing the devices and their drivers ISRs.
effectively
operates and adopts appropriate strategy for obtaining optimal performance for
the devices.
Coordinates
between application-process, driver and device-controller.
Device manager
Process
sends a request to the driver by an interrupt; and the driver provides the
actions by executing an ISR.
Device
manager polls the requests at the devices and the actions occur as per their
priorities.
Manages
IO Interrupts (requests) queues.
creates
an appropriate kernel interface and API and that activates the control register
specific actions of the device. [Activates device controller through the API and
kernel interface.]
manages
the physical as well as virtual devices like the pipes and sockets through a
common strategy.
Device management has three standard approaches
Three
types of device drivers:
(i) Programmed
I/Os by polling from each device its the service need from each device.
(ii) Interrupt(s)
from the device drivers‘ device- ISR and
(iii)Device
uses DMA operation used by the devices to access the memory.
Most
common is the use of device driver ISRs
Device Manager Functions
Device
Detection and Addition Device Deletion
Device
Allocation and Registration
Detaching
and Deregistration
Restricting
Device to a specific process Device Sharing
Device
control
Device
Access Management Device Buffer Management
Device
Queue, Circular-queue or blocks of queues Management Device drivers updating
and upload of new device-functions
Backup
and restoration
Device Types
char
devices and block devices
Set of Command Functions for the Device Management
Commands for Device
create
open write read ioctl
close and
delete
IO control Command for Device
(i) Accessing specific partition
information
(ii) Defining commands and control
functions of device registers
(iii) IO channel control
Three arguments in ioctl ( )
First
Argument: Defines the chosen device and its function by passing as argument the
device descriptor (a number), for example, fd or sfd Example is fd = 1 for
read, fd = 2 for write.
Second
Argument: Defines the control option or uses option for the IO device, for
example, baud rate or other parameter optional function
Third
Argument: Values needed by the defined function are at the third argument
Example
Status =
ioctl (fd, FIOBAUDRATE, 19200) is an instruction in RTOS VxWorks. fd is the device descriptor (an integer
returned when the device is opened)
FIOBAUDRATE
is the function that takes value = 19200 from the argument. This at configures
the device for operation at 19200-baud rate.
Device Driver ISR functions
ISR functions
intlock ( ) to
disable device-interrupts systems, intUnlock
( ) to enable device-interrupts,
intConnect ( ) to connect a C function to an
interrupt vector
Interrupt vector address for a device ISR points to
its specified C function. intContext ( ) finds whether interrupt is called when
an ISR was in execution
Unix OS functions
UNIX Device driver functions
Facilitates
that for devices and files have an analogous implementation as far as possible.
open ( ), close ( ), read ( ),
write ( ) functions analogous to a file open,
close, read and write functions.
APIs and kernel interfaces in BSD (Berkley sockets
for devices)
open, close, read write
in-kernel commands
(i)
select ( ) to
check whther read/write will succeed and then select (ii) ioctl ( )
(iii) stop
( ) to cancel the output activity from the device.
(iv) strategy ( ) to permit a block read or write or character read or write
Round Robin Time Slicing of tasks of equal
priorities
Common scheduling models
·
Cooperative Scheduling of ready tasks in a circular
queue. It closely relates to function queue scheduling.
·
Cooperative Scheduling with Precedence Constraints
·
Cyclic scheduling of periodic tasks and Round Robin
Time Slicing Scheduling of equal priority tasks
·
Preemptive Scheduling
·
Scheduling using 'Earliest Deadline First' (EDF)
precedence.
Common scheduling models
·
Rate Monotonic Scheduling using ‗higher rate of
events occurrence First‘ precedence
·
Fixed Times Scheduling
·
Scheduling of Periodic, sporadic and aperiodic
Tasks
·
Advanced scheduling algorithms using the
probabilistic Timed Petri nets (Stochastic) or Multi Thread Graph for the
multiprocessors and complex distributed systems.
Round Robin Time Slice Scheduling of Equal Priority
Tasks
Equal Priority Tasks
·
Round robin means that each ready task runs turn by
in turn only in a cyclic queue for a limited time slice.
·
Widely used model in traditional OS.
·
Round robin is a hybrid model of clock-driven
·
model (for example cyclic model) as well as event
driven (for example, preemptive)
·
A real time system responds to the event within a
bound time limit and within an explicit time.
Tasks programs contexts at the five instances in
the Time Scheduling Scheduler for C1 to C5
Programming
model for the Cooperative Time sliced scheduling of the tasks
Program
counter assignments on the scheduler call to tasks at two consecutive time
slices. Each cycle takes time = N tslice
Case :
Tcycle = N Tslice
·
Same for every task = Tcycle
·
Tcycle ={Tslice )}
N + tISR.
·
tISR is the sum of all execution times for the ISRs
·
For an i-th task, switching time from one task to
another be is st and task execution
time be is et
·
Number of tasks = N
Worst-case latency
·
Same for every task in the ready list
·
Tworst = {N
(Tslice)} + tISR.
·
tISR is the sum of all execution times for the ISRs
·
i = 1, 2, …, N
1 , N
VoIP Tasks Example
Assume a
VoIP [Voice Over IP.] router.
·
It routes the packets to N destinations from N
sources.
·
It has N calls to route.
·
Each of N tasks is allotted from a time slice and
is cyclically executed for routing packet from a source to its destination
Round Robin
·
Case 1: Then each task is executed once and
finishes in one cycle itself.
·
When a task finishes the execution before the
maximum time it can takes, there is a waiting period in-between period between
two cycles.
·
The worst-case latency for any task is then Ntslice.
A task may periodically need execution. A task The period for the its need of
required repeat execution of a task is an integral multiple of tslice.
Case 2: Alternative model strategy
·
Case 2: Certain tasks are executed more than once
and do not finish in one cycle
·
Decomposition
of a task
that takes the abnormally long time to be executed.
·
The decomposition is into two or four or more tasks.
·
Then one set of tasks (or the odd numbered tasks)
can run in one time slice, t'slice and the another set of tasks (or the even
numbered tasks) in another time slice, t''slice.
Decomposition of the long time taking task into a
number of sequential states
·
Decomposition
of the long time taking task into a number of sequential
states or a number of node-places and
transitions as in finite state machine. (FSM).
·
Then its one of its states or transitions runs in
the first cycle, the next state in the second cycle and so on.
·
This task then reduces the response times of the
remaining tasks that are executed after a state change.