Chapter: Distributed and Cloud Computing: From Parallel Processing to the Internet of Things : Virtual Machines and Virtualization of Clusters and Data Centers
Virtualization of CPU, Memory, and I/O Devices
VIRTUALIZATION OF CPU, MEMORY, AND I/O DEVICES
To support virtualization,
processors such as the x86 employ a special running mode and instructions,
known as hardware-assisted
virtualization. In this way, the VMM and guest OS run in different modes and all
sensitive instructions of the guest OS and its applications are trapped in the
VMM. To save processor states, mode switching is completed by hardware. For the
x86 architecture, Intel and AMD have proprietary technologies for
hardware-assisted virtualization.
1. Hardware Support for Virtualization
Modern operating systems and
processors permit multiple processes to run simultaneously. If there is no
protection mechanism in a processor, all instructions from different processes
will access the hardware directly and cause a system crash. Therefore, all
processors have at least two modes, user mode and supervisor mode, to ensure
controlled access of critical hardware. Instructions running in supervisor mode
are called privileged instructions. Other instructions are unprivileged
instructions. In a virtualized environment, it is more difficult to make OSes
and applications run correctly because there are more layers in the machine
stack. Example 3.4 discusses Intel’s hardware support approach.
At the
time of this writing, many hardware virtualization products were available. The
VMware Workstation is a VM software suite for x86 and x86-64 computers. This
software suite allows users to set up multiple x86 and x86-64 virtual computers
and to use one or more of these VMs simultaneously with the host operating
system. The VMware Workstation assumes the host-based virtualization. Xen is a
hypervisor for use in IA-32, x86-64, Itanium, and PowerPC 970 hosts. Actually,
Xen modifies Linux as the lowest and most privileged layer, or a hypervisor.
One or
more guest OS can run on top of the hypervisor. KVM (Kernel-based Virtual Machine) is a Linux kernel
virtualization infrastructure. KVM can support hardware-assisted virtualization
and paravirtualization by using the Intel VT-x or AMD-v and VirtIO framework,
respectively. The VirtIO framework includes a paravirtual Ethernet card, a disk
I/O controller, a balloon device for adjusting guest memory usage, and a VGA
graphics interface using VMware drivers.
Example 3.4 Hardware Support for Virtualization
in the Intel x86 Processor
Since
software-based virtualization techniques are complicated and incur performance
overhead, Intel provides a hardware-assist technique to make virtualization
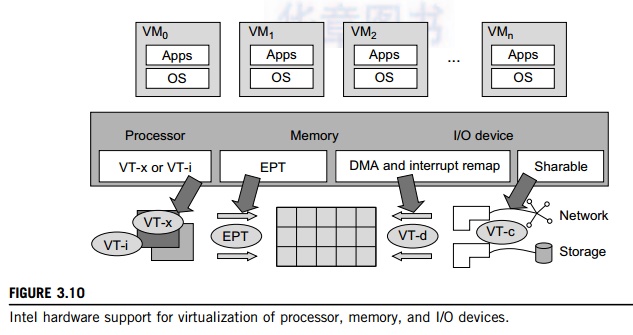
easy and improve performance. Figure 3.10 provides an overview of Intel’s full
virtualization techniques. For processor virtualization, Intel offers the VT-x
or VT-i technique. VT-x adds a privileged mode (VMX Root Mode) and some
instructions to processors. This enhancement traps all sensitive instructions
in the VMM automatically. For memory virtualization, Intel offers the EPT,
which translates the virtual address to the machine’s physical addresses to
improve performance. For I/O virtualization, Intel implements VT-d and VT-c to
support this.
2. CPU Virtualization
A VM is a duplicate of an existing computer
system in which a majority of the VM instructions are executed on the host
processor in native mode. Thus, unprivileged instructions of VMs run directly
on the host machine for higher efficiency. Other critical instructions should
be handled carefully for correctness and stability. The critical instructions
are divided into three categories: privileged
instructions, control-sensitive instructions, and
behavior-sensitive instructions.
Privileged instructions execute in a privileged mode and will be trapped if executed outside
this mode. Control-sensitive instructions attempt to change the configuration
of resources used. Behavior-sensitive instructions have different behaviors
depending on the configuration of resources, including the load and store
operations over the virtual memory.
A CPU architecture is virtualizable if it
supports the ability to run the VM’s privileged and unprivileged instructions in
the CPU’s user mode while the VMM runs in supervisor mode. When the
privileged instructions including control- and behavior-sensitive instructions
of a VM are exe-cuted, they are trapped in the VMM. In this case, the VMM acts
as a unified mediator for hardware access from different VMs to guarantee the
correctness and stability of the whole system. However, not all CPU
architectures are virtualizable. RISC CPU architectures can be naturally
virtualized because all control- and behavior-sensitive instructions are
privileged instructions. On the contrary, x86 CPU architectures are not primarily
designed to support virtualization. This is because about 10 sensitive
instructions, such as SGDT and SMSW, are not privileged instructions. When these
instruc-tions execute in virtualization, they cannot be trapped in the VMM.
On a native UNIX-like system, a system call
triggers the 80h interrupt and passes control to the OS kernel. The interrupt
handler in the kernel is then invoked to process the system call. On a
para-virtualization system such as Xen, a system call in the guest OS first
triggers the 80h interrupt nor-mally. Almost at the same time, the 82h interrupt in the hypervisor is triggered. Incidentally, control is
passed on to the hypervisor as well. When the hypervisor completes its task for
the guest OS system call, it passes control back to the guest OS kernel.
Certainly, the guest OS kernel may also invoke the hypercall while it’s running. Although paravirtualization of a CPU lets unmodified
applications run in the VM, it causes a small performance penalty.
2.1
Hardware-Assisted CPU Virtualization
This technique attempts to
simplify virtualization because full or paravirtualization is complicated.
Intel and AMD add an additional mode called privilege mode level (some people
call it Ring-1) to x86 processors. Therefore, operating systems can still run
at Ring 0 and the hypervisor can run at Ring -1. All the privileged and
sensitive instructions are trapped in the hypervisor automatically. This
technique removes the difficulty of implementing binary translation of full
virtualization. It also lets the operating system run in VMs without
modification.
Example 3.5 Intel Hardware-Assisted CPU
Virtualization
Although x86 processors are not virtualizable
primarily, great effort is taken to virtualize them. They are used widely in
comparing RISC processors that the bulk of x86-based legacy systems cannot
discard easily. Virtuali-zation of x86 processors is detailed in the following
sections. Intel’s VT-x technology is an example of hardware-assisted
virtualization, as shown in Figure 3.11. Intel calls the privilege level of x86
processors the VMX Root Mode. In order to control the start and stop of a VM
and allocate a memory page to maintain the
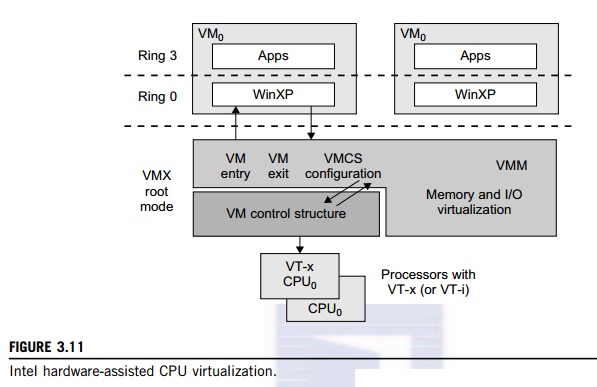
CPU
state for VMs, a set of additional instructions is added. At the time of this
writing, Xen, VMware, and the Microsoft Virtual PC all implement their
hypervisors by using the VT-x technology.
Generally, hardware-assisted
virtualization should have high efficiency. However, since the transition from
the hypervisor to the guest OS incurs high overhead switches between processor
modes, it sometimes cannot outperform binary translation. Hence, virtualization
systems such as VMware now use a hybrid approach, in which a few tasks are
offloaded to the hardware but the rest is still done in software. In addition,
para-virtualization and hardware-assisted virtualization can be combined to
improve the performance further.
3. Memory Virtualization
Virtual memory virtualization
is similar to the virtual memory support provided by modern operat-ing systems.
In a traditional execution environment, the operating system maintains mappings
of virtual memory to machine memory using page tables, which is a one-stage mapping
from virtual memory to machine memory. All
modern x86 CPUs include a memory
management unit (MMU) and a translation
lookaside buffer (TLB) to optimize virtual memory performance. However, in a virtual
execution environment, virtual memory virtualization involves sharing the
physical system memory in RAM and dynamically allocating it to the physical memory of the VMs.
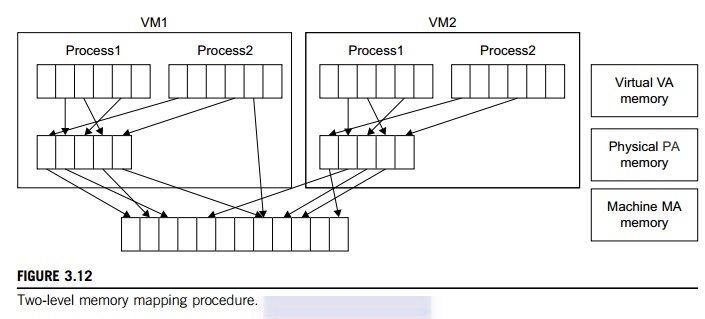
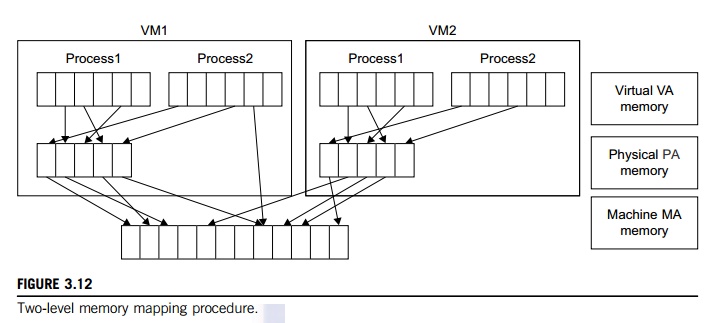
That means a two-stage
mapping process should be maintained by the guest OS and the VMM, respectively:
virtual memory to physical memory and physical memory to machine memory.
Furthermore, MMU virtualization should be supported, which is transparent to
the guest OS. The guest OS continues to control the mapping of virtual
addresses to the physical memory addresses of VMs. But the guest OS cannot
directly access the actual machine memory. The VMM is responsible for mapping
the guest physical memory to the actual machine memory. Figure 3.12 shows the
two-level memory mapping procedure.
Since
each page table of the guest OSes has a separate page table in the VMM
corresponding to it, the VMM page table is called the shadow page table. Nested
page tables add another layer of indirection to virtual memory. The MMU already
handles virtual-to-physical translations as defined by the OS. Then the
physical memory addresses are translated to machine addresses using another set
of page tables defined by the hypervisor. Since modern operating systems
maintain a set of page tables for every process, the shadow page tables will
get flooded. Consequently, the perfor-mance overhead and cost of memory will be
very high.
VMware uses shadow page
tables to perform virtual-memory-to-machine-memory address translation.
Processors use TLB hardware to map the virtual memory directly to the machine
memory to avoid the two levels of translation on every access. When the guest
OS changes the virtual memory to a physical memory mapping, the VMM updates the
shadow page tables to enable a direct lookup. The AMD Barcelona processor has
featured hardware-assisted memory virtualization since 2007. It provides
hardware assistance to the two-stage address translation in a virtual execution
environment by using a technology called nested paging.
Example 3.6 Extended Page Table by Intel for
Memory Virtualization
Since the efficiency of the software shadow
page table technique was too low, Intel developed a hardware-based EPT
technique to improve it, as illustrated in Figure 3.13. In addition, Intel
offers a Virtual Processor ID (VPID) to improve use of the TLB. Therefore, the
performance of memory virtualization is greatly improved. In Figure 3.13, the
page tables of the guest OS and EPT are all four-level.
When a virtual address needs
to be translated, the CPU will first look for the L4 page table pointed to by
Guest CR3. Since the address in Guest CR3 is a physical address in the guest
OS, the CPU needs to convert the Guest CR3 GPA to the host physical address
(HPA) using EPT. In this procedure, the CPU will check the EPT TLB to see if
the translation is there. If there is no required translation in the EPT TLB,
the CPU will look for it in the EPT. If the CPU cannot find the translation in
the EPT, an EPT violation exception will be raised.
When the GPA of the L4 page table is obtained,
the CPU will calculate the GPA of the L3 page table by using the GVA and the
content of the L4 page table. If the entry corresponding to the GVA in the L4
page table is a page fault, the CPU will
generate a page fault interrupt and will let the guest OS kernel handle the
interrupt. When the PGA of the L3 page table is obtained, the CPU will look for
the EPT to get the HPA of the L3 page table, as described earlier. To get the
HPA corresponding to a GVA, the CPU needs to look for the EPT five times, and
each time, the memory needs to be accessed four times. There-fore, there are 20
memory accesses in the worst case, which is still very slow. To overcome this
short-coming, Intel increased the size of the EPT TLB to decrease the number of
memory accesses.
4. I/O Virtualization
I/O virtualization involves
managing the routing of I/O requests between virtual devices and the shared
physical hardware. At the time of this writing, there are three ways to
implement I/O virtualization: full device emulation, para-virtualization, and
direct I/O. Full device emulation is the first approach for I/O virtualization.
Generally, this approach emulates well-known, real-world devices.
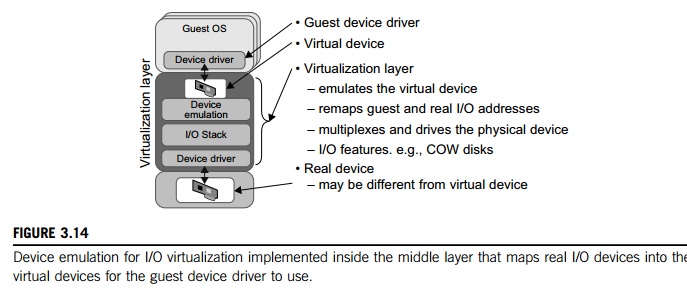
All the functions of a device
or bus infrastructure, such as device enumeration, identification, interrupts,
and DMA, are replicated in software. This software is located in the VMM and
acts as a virtual device. The I/O access requests of the guest OS are trapped
in the VMM which interacts with the I/O devices. The full device emulation
approach is shown in Figure 3.14.
A single hardware device can be shared by
multiple VMs that run concurrently. However, software emulation runs much
slower than the hardware it emulates [10,15]. The para-virtualization method of
I/O virtualization is typically used in Xen. It is also known as the split driver
model consisting of a frontend driver and a backend driver. The frontend driver
is running in Domain U and the backend dri-ver is running in Domain 0. They
interact with each other via a block of shared memory. The frontend driver
manages the I/O requests of the guest OSes and the backend driver is
responsible for managing the real I/O devices and multiplexing the I/O data of
different VMs. Although para-I/O-virtualization achieves better device
performance than full device emulation, it comes with a higher CPU overhead.
Direct
I/O virtualization lets the VM access devices directly. It can achieve
close-to-native performance without high CPU costs. However, current direct I/O
virtualization implementations focus on networking for mainframes. There are a
lot of challenges for commodity hardware devices. For example, when a physical
device is reclaimed (required by workload migration) for later reassign-ment,
it may have been set to an arbitrary state (e.g., DMA to some arbitrary memory
locations) that can function incorrectly or even crash the whole system. Since
software-based I/O virtualization requires a very high overhead of device
emulation, hardware-assisted I/O virtualization is critical. Intel VT-d
supports the remapping of I/O DMA transfers and device-generated interrupts.
The architecture of VT-d provides the flexibility to support multiple usage
models that may run unmodified, special-purpose, or “virtualization-aware” guest OSes.
Another way to help I/O virtualization is via
self-virtualized I/O (SV-IO) [47]. The key idea of SV-IO is to harness the rich
resources of a multicore processor. All tasks associated with virtualizing an
I/O device are encapsulated in SV-IO. It provides virtual devices and an
associated access API to VMs and a management API to the VMM. SV-IO defines one
virtual interface (VIF) for every kind of virtua-lized I/O device, such as
virtual network interfaces, virtual block devices (disk), virtual camera
devices, and others. The guest OS interacts with the VIFs via VIF device
drivers. Each VIF consists of two mes-sage queues. One is for outgoing messages
to the devices and the other is for incoming messages from the devices. In
addition, each VIF has a unique ID for identifying it in SV-IO.
Example 3.7 VMware Workstation for I/O
Virtualization
The
VMware Workstation runs as an application. It leverages the I/O device support
in guest OSes, host OSes, and VMM to implement I/O virtualization. The
application portion (VMApp) uses a driver loaded into the host operating system
(VMDriver) to establish the privileged VMM, which runs directly on the
hardware. A given physical processor is executed in either the host world or
the VMM world, with the VMDriver facilitating the transfer of control between
the two worlds. The VMware Workstation employs full device emulation to
implement I/O virtualization. Figure 3.15 shows the functional blocks used in
sending and receiving packets via the emulated virtual NIC.

The
virtual NIC models an AMD Lance Am79C970A controller. The device driver for a
Lance controller in the guest OS initiates packet transmissions by reading and
writing a sequence of virtual I/O ports; each read or write switches back to
the VMApp to emulate the Lance port accesses. When the last OUT instruc-tion of
the sequence is encountered, the Lance emulator calls a normal write() to the
VMNet driver. The VMNet driver then passes the packet onto the network via a
host NIC and then the VMApp switches back to the VMM. The switch raises a
virtual interrupt to notify the guest device driver that the packet was sent.
Packet receives occur in reverse.
5. Virtualization in Multi-Core
Processors
Virtualizing a multi-core
processor is relatively more complicated than virtualizing a uni-core
processor. Though multicore processors are claimed to have higher performance
by integrating multiple processor cores in a single chip, muti-core
virtualiuzation has raised some new challenges to computer architects, compiler
constructors, system designers, and application programmers. There are mainly
two difficulties: Application programs must be parallelized to use all cores
fully, and software must explicitly assign tasks to the cores, which is a very
complex problem.
Concerning
the first challenge, new programming models, languages, and libraries are
needed to make parallel programming easier. The second challenge has spawned
research involving scheduling algorithms and resource management policies. Yet
these efforts cannot balance well among performance, complexity, and other
issues. What is worse, as technology scales, a new challenge called dynamic heterogeneity is emerging to mix the fat
CPU core and thin GPU cores on the same chip, which further complicates the multi-core or
many-core resource management. The dynamic heterogeneity of hardware
infrastructure mainly comes from less reliable transistors and increased
complexity in using the transistors [33,66].
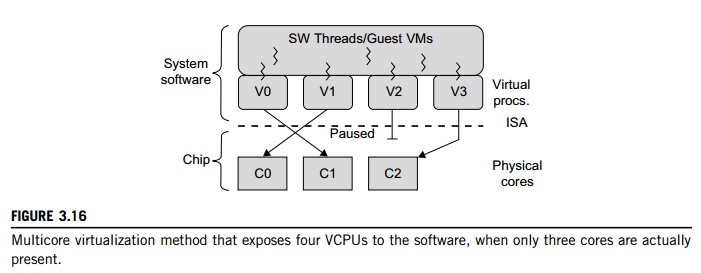
5.1
Physical versus Virtual Processor Cores
Wells, et al. [74] proposed a
multicore virtualization method to allow hardware designers to get an
abstraction of the low-level details of the processor cores. This technique
alleviates the burden and inefficiency of managing hardware resources by
software. It is located under the ISA and remains unmodified by the operating
system or VMM (hypervisor). Figure 3.16 illustrates the technique of a
software-visible VCPU moving from one core to another and temporarily
suspending execution of a VCPU when there are no appropriate cores on which it
can run.
5.2
Virtual Hierarchy
The emerging many-core chip multiprocessors (CMPs) provides a new
computing landscape. Instead of supporting time-sharing jobs on one or a few
cores, we can use the abundant cores in a space-sharing, where single-threaded
or multithreaded jobs are simultaneously assigned to separate groups of cores
for long time intervals. This idea was originally suggested by Marty and Hill
[39]. To optimize for space-shared workloads, they propose using virtual hierarchies to overlay a coherence and
caching hierarchy onto a physical processor. Unlike a fixed physical hierarchy,
a virtual hierarchy can adapt to fit how the work is space shared for improved
performance and performance isolation.
Today’s many-core CMPs use a physical hierarchy of
two or more cache levels that statically determine the cache allocation and
mapping. A virtual
hierarchy is a cache hierarchy that can adapt to fit the workload or mix of
workloads [39]. The hierarchy’s first level locates data
blocks close to the cores needing them for faster access, establishes a
shared-cache domain, and establishes a point of coherence for faster
communication. When a miss leaves a tile, it first attempts to locate the block
(or sharers) within the first level. The first level can also pro-vide
isolation between independent workloads. A miss at the L1 cache can invoke the
L2 access.
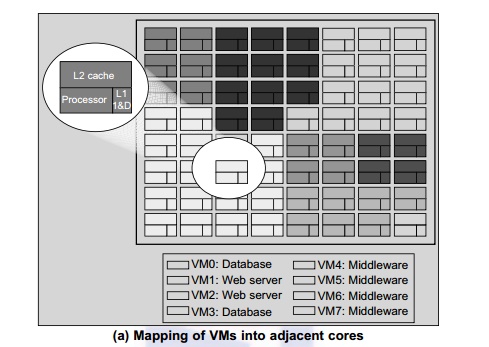
The idea
is illustrated in Figure 3.17(a). Space sharing is applied to assign three
workloads to three clusters of virtual cores: namely VM0 and VM3 for database
workload, VM1 and VM2 for web server workload, and VM4–VM7 for middleware workload. The basic
assumption is that each workload runs in its own VM. However, space sharing
applies equally within a single operating system. Statically distributing the
directory among tiles can do much better, provided operating sys-tems or
hypervisors carefully map virtual pages to physical frames. Marty and Hill
suggested a two-level virtual coherence and caching hierarchy that harmonizes
with the assignment of tiles to the virtual clusters of VMs.
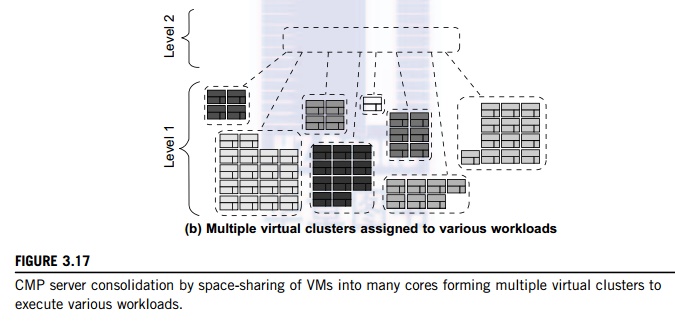
Figure 3.17(b) illustrates a
logical view of such a virtual cluster hierarchy in two levels. Each VM
operates in a isolated fashion at the first level. This will minimize both miss
access time and performance interference with other workloads or VMs. Moreover,
the shared resources of cache capacity, inter-connect links, and miss handling
are mostly isolated between VMs. The second level maintains a globally shared
memory. This facilitates dynamically repartitioning resources without costly
cache flushes. Furthermore, maintaining globally shared memory minimizes
changes to existing system software and allows virtualization features such as
content-based page sharing. A virtual hierarchy adapts to space-shared
workloads like multiprogramming and server consolidation. Figure 3.17 shows a
case study focused on consolidated server workloads in a tiled architecture.
This many-core mapping scheme can also optimize for space-shared
multiprogrammed workloads in a single-OS environment.
Related Topics