Chapter: Distributed and Cloud Computing: From Parallel Processing to the Internet of Things : Virtual Machines and Virtualization of Clusters and Data Centers
Virtualization Structures/Tools and Mechanisms
VIRTUALIZATION STRUCTURES/TOOLS AND MECHANISMS
In general, there are three
typical classes of VM architecture. Figure 3.1 showed the architectures of a
machine before and after virtualization. Before virtualization, the operating
system manages the hardware. After virtualization, a virtualization layer is
inserted between the hardware and the operat-ing system. In such a case, the
virtualization layer is responsible for converting portions of the real
hardware into virtual hardware. Therefore, different operating systems such as
Linux and Windows can run on the same physical machine, simultaneously.
Depending on the position of the virtualiza-tion layer, there are several
classes of VM architectures, namely the hypervisor architecture, para-
virtualization, and host-based virtualization. The hypervisor is also known as the VMM (Virtual Machine Monitor). They both perform the same
virtualization operations.
1. Hypervisor and Xen Architecture
The hypervisor supports
hardware-level virtualization (see Figure 3.1(b)) on bare metal devices like
CPU, memory, disk and network interfaces. The hypervisor software sits directly
between the physi-cal hardware and its OS. This virtualization layer is
referred to as either the VMM or the hypervisor. The hypervisor provides hypercalls for the guest OSes and applications. Depending
on the functional-ity, a hypervisor can assume a micro-kernel architecture like the Microsoft Hyper-V.
Or it can assume a monolithic
hypervisor architecture like the VMware ESX for server virtualization.
A
micro-kernel hypervisor includes only the basic and unchanging functions (such
as physical memory management and processor scheduling). The device drivers and
other changeable components are outside the hypervisor. A monolithic hypervisor
implements all the aforementioned functions, including those of the device
drivers. Therefore, the size of the hypervisor code of a micro-kernel
hyper-visor is smaller than that of a monolithic hypervisor. Essentially, a
hypervisor must be able to convert physical devices into virtual resources
dedicated for the deployed VM to use.
1.1
The Xen Architecture
Xen is an open source
hypervisor program developed by Cambridge University. Xen is a micro-kernel
hypervisor, which separates the policy from the mechanism. The Xen hypervisor
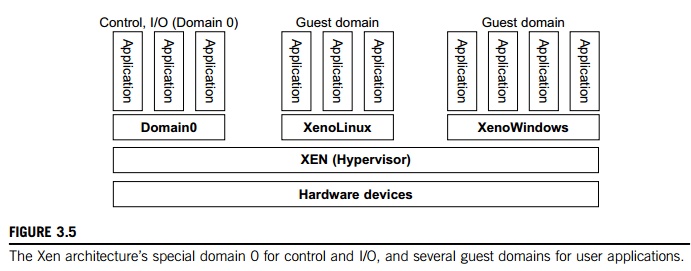
implements all the mechanisms, leaving the policy to be handled by Domain 0, as
shown in Figure 3.5. Xen does not include any device drivers natively [7]. It
just provides a mechanism by which a guest OS can have direct access to the
physical devices. As a result, the size of the Xen hypervisor is kept rather
small. Xen provides a virtual environment located between the hardware and the
OS. A number of vendors are in the process of developing commercial Xen
hypervisors, among them are Citrix XenServer [62] and Oracle VM [42].
The core components of a Xen
system are the hypervisor, kernel, and applications. The organi-zation of the
three components is important. Like other virtualization systems, many guest
OSes can run on top of the hypervisor. However, not all guest OSes are created
equal, and one in
particular controls the
others. The guest OS, which has control ability, is called Domain 0, and the
others are called Domain U. Domain 0 is a privileged guest OS of Xen. It is
first loaded when Xen boots without any file system drivers being available.
Domain 0 is designed to access hardware directly and manage devices. Therefore,
one of the responsibilities of Domain 0 is to allocate and map hardware
resources for the guest domains (the Domain U domains).
For
example, Xen is based on Linux and its security level is C2. Its management VM
is named Domain 0, which has the privilege to manage other VMs implemented on
the same host. If Domain 0 is compromised, the hacker can control the entire
system. So, in the VM system, security policies are needed to improve the security
of Domain 0. Domain 0, behaving as a VMM, allows users to create, copy, save,
read, modify, share, migrate, and roll back VMs as easily as manipulating a
file, which flexibly provides tremendous benefits for users. Unfortunately, it
also brings a series of security problems during the software life cycle and data lifetime.
Traditionally, a machine’s lifetime can be envisioned as a straight line where the current
state of the machine is a point that progresses monotonically as the software
executes. During this time, con-figuration changes are made, software is
installed, and patches are applied. In such an environment, the VM state is
akin to a tree: At any point, execution can go into N different branches where multiple instances of a VM can exist at any
point in this tree at any given time. VMs are allowed to roll back to previous
states in their execution (e.g., to fix configuration errors) or rerun from the
same point many times (e.g., as a means of distributing dynamic content or
circulating a “live” system image).
2. Binary Translation with Full
Virtualization
Depending on implementation
technologies, hardware virtualization can be classified into two cate-gories: full virtualization and host-based virtualization. Full virtualization does
not need to modify the host OS. It relies on binary translation to trap and to virtualize
the execution of certain sensitive, nonvirtualizable instructions. The guest
OSes and their applications consist of noncritical and critical instructions.
In a host-based system, both a host OS and a guest OS are used. A
virtuali-zation software layer is built between the host OS and guest OS. These
two classes of VM architec-ture are introduced next.
2.1
Full Virtualization
With full virtualization,
noncritical instructions run on the hardware directly while critical
instructions are discovered and replaced with traps into the VMM to be emulated
by software. Both the hypervisor and VMM approaches are considered full
virtualization. Why are only critical instructions trapped into the VMM? This
is because binary translation can incur a large performance overhead.
Noncritical instructions do not control hardware or threaten the security of
the system, but critical instructions do. Therefore, running noncritical
instructions on hardware not only can promote efficiency, but also can ensure
system security.
2.2
Binary Translation of Guest OS Requests Using a VMM
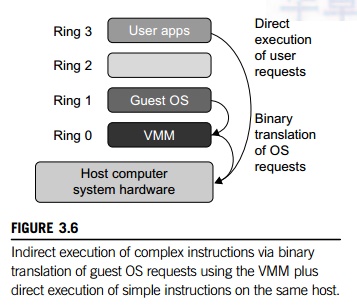
This approach was implemented
by VMware and many other software companies. As shown in Figure 3.6, VMware
puts the VMM at Ring 0 and the guest OS at Ring 1. The VMM scans the
instruction stream and identifies the privileged, control- and
behavior-sensitive instructions. When these instructions are identified, they
are trapped into the VMM, which emulates the behavior of these instructions.
The method used in this emulation is called binary translation. Therefore, full
vir-tualization combines binary translation and direct execution. The guest OS
is completely decoupled from the underlying hardware. Consequently, the guest
OS is unaware that it is being virtualized.
The
performance of full virtualization may not be ideal, because it involves binary
translation which is rather time-consuming. In particular, the full
virtualization of I/O-intensive applications is a really a big challenge.
Binary translation employs a code cache to store translated hot instructions to
improve performance, but it increases the cost of memory usage. At the time of
this writing, the performance of full virtualization on the x86 architecture is
typically 80 percent to 97 percent that of the host machine.
2.3
Host-Based Virtualization
An alternative VM
architecture is to install a virtualization layer on top of the host OS. This
host OS is still responsible for managing the hardware. The guest OSes are
installed and run on top of the virtualization layer. Dedicated applications
may run on the VMs. Certainly, some other applications
can also run with the host OS
directly. This host-based architecture has some distinct advantages, as
enumerated next. First, the user can install this VM architecture without
modifying the host OS. The virtualizing
software can rely on the host OS to provide device drivers and other low-level
services. This will simplify the VM design and ease its deployment.
Second, the host-based
approach appeals to many host machine configurations. Compared to the
hypervisor/VMM architecture, the performance of the host-based architecture may
also be low. When an application requests hardware access, it involves four
layers of mapping which downgrades performance significantly. When the ISA of a
guest OS is different from the ISA of the underlying hardware, binary
translation must be adopted. Although the host-based architecture has
flexibility, the performance is too low to be useful in practice.
3. Para-Virtualization with Compiler
Support
Para-virtualization needs to modify the guest
operating systems. A para-virtualized VM provides special APIs requiring substantial OS
modifications in user applications. Performance degradation is a critical issue
of a virtualized system. No one wants to use a VM if it is much slower than
using a physical machine. The virtualization layer can be inserted at different
positions in a machine soft-ware stack. However, para-virtualization attempts
to reduce the virtualization overhead, and thus improve performance by
modifying only the guest OS kernel.
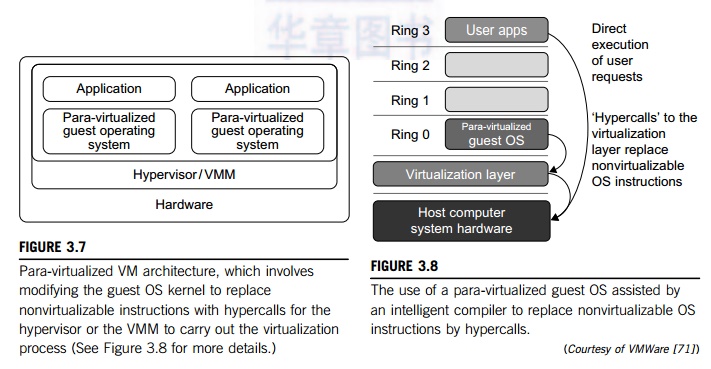
Figure
3.7 illustrates the concept of a paravirtualized VM architecture. The guest
operating systems are para-virtualized. They are assisted by an intelligent
compiler to replace the nonvirtualizable OS instructions by hypercalls as
illustrated in Figure 3.8. The traditional x86 processor offers four
instruction execution rings: Rings 0, 1, 2, and 3. The lower the ring number,
the higher the privilege of instruction being executed. The OS is responsible
for managing the hardware and the privileged instructions to execute at Ring
0, while user-level applications run at Ring 3. The best example of
para-virtualization is the KVM to be described below.
3.1
Para-Virtualization Architecture
When the x86 processor is
virtualized, a virtualization layer is inserted between the hardware and the
OS. According to the x86 ring definition, the virtualization layer should also
be installed at Ring 0. Different instructions at Ring 0 may cause some
problems. In Figure 3.8, we show that para-virtualization replaces
nonvirtualizable instructions with hypercalls that communicate directly with the hypervisor
or VMM. However, when the guest OS kernel is modified for virtualization, it
can no longer run on the hardware directly.
Although
para-virtualization reduces the overhead, it has incurred other problems.
First, its compatibility and portability may be in doubt, because it must
support the unmodified OS as well. Second, the cost of maintaining
para-virtualized OSes is high, because they may require deep OS kernel
modifications. Finally, the performance advantage of para-virtualization varies
greatly due to workload variations. Compared with full virtualization,
para-virtualization is relatively easy and more practical. The main problem in
full virtualization is its low performance in binary translation. To speed up
binary translation is difficult. Therefore, many virtualization products employ
the para-virtualization architecture. The popular Xen, KVM, and VMware ESX are
good examples.
3.2
KVM (Kernel-Based VM)
This is a Linux
para-virtualization system—a part of the Linux version
2.6.20 kernel. Memory management and scheduling activities are carried out by
the existing Linux kernel. The KVM does the rest, which makes it simpler than
the hypervisor that controls the entire machine. KVM is a hardware-assisted
para-virtualization tool, which improves performance and supports unmodified
guest OSes such as Windows, Linux, Solaris, and other UNIX variants.
3.3
Para-Virtualization with Compiler Support
Unlike the full
virtualization architecture which intercepts and emulates privileged and
sensitive instructions at runtime, para-virtualization handles these
instructions at compile time. The guest OS kernel is modified to replace the
privileged and sensitive instructions with hypercalls to the hypervi-sor or
VMM. Xen assumes such a para-virtualization architecture.
The
guest OS running in a guest domain may run at Ring 1 instead of at Ring 0. This
implies that the guest OS may not be able to execute some privileged and
sensitive instructions. The privileged instructions are implemented by
hypercalls to the hypervisor. After replacing the instructions with hypercalls,
the modified guest OS emulates the behavior of the original guest OS. On an
UNIX system, a system call involves an interrupt or service routine. The
hypercalls apply a dedicated service routine in Xen.
Example 3.3 VMware ESX Server for
Para-Virtualization
VMware
pioneered the software market for virtualization. The company has developed
virtualization tools for desktop systems and servers as well as virtual
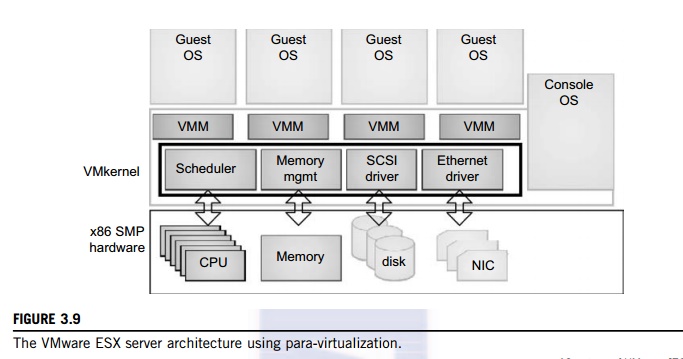
infrastructure for large data centers. ESX is a VMM or a hypervisor for
bare-metal x86 symmetric multiprocessing (SMP) servers. It accesses hardware
resources such as I/O directly and has complete resource management control. An
ESX-enabled server consists of four components: a virtualization layer, a
resource manager, hardware interface components, and a service console, as
shown in Figure 3.9. To improve performance, the ESX server employs a
para-virtualization architecture in which the VM kernel interacts directly with
the hardware without involving the host OS.
The VMM layer virtualizes the physical hardware
resources such as CPU, memory, network and disk controllers, and human
interface devices. Every VM has its own set of virtual hardware resources. The
resource manager allocates CPU, memory disk, and network bandwidth and maps
them to the virtual hardware resource set of each VM created. Hardware
interface components are the device drivers and the
VMware
ESX Server File System. The service console is responsible for booting the
system, initiating the execution of the VMM and resource manager, and
relinquishing control to those layers. It also facilitates the process for
system administrators.
Related Topics