Chapter: 11th Physics : UNIT 10 : Oscillations
Horizontal oscillations of a spring-mass system - Linear Simple Harmonic Oscillator (LHO)
Horizontal oscillations of a spring-mass system
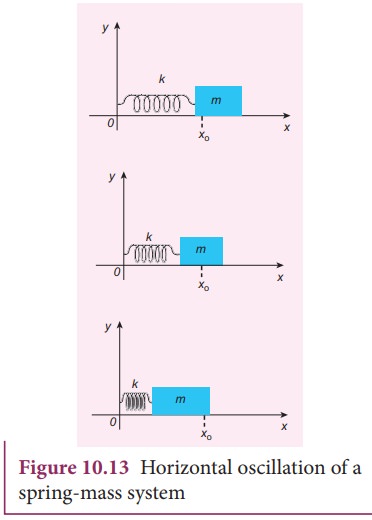
Consider a system containing a block of mass m attached to a massless spring with stiffness constant or force constant or spring constant k placed on a smooth horizontal surface (frictionless surface) as shown in Figure 10.13. Let x0 be the equilibrium position or mean position of mass m when it is left undisturbed. Suppose the mass is displaced through a small displacement x towards right from its equilibrium position and then released, it will oscillate back and forth about its mean position x0. Let F be the restoring force (due to stretching of the spring) which is proportional to the amount of displacement of block. For one dimensional motion, mathematically, we have

where negative sign implies that the restoring force will always act opposite to the direction of the displacement. This equation is called Hooke’s law. Notice that, the restoring force is linear with the displacement (i.e., the exponent of force and displacement are unity). This is not always true; in case if we apply a very large stretching force, then the amplitude of oscillations becomes very large (which means, force is proportional to displacement containing higher powers of x) and therefore, the oscillation of the system is not linear and hence, it is called non-linear oscillation. We restrict ourselves only to linear oscillations throughout our discussions, which means Hooke’s law is valid (force and displacement have a linear relationship).
From Newton’s second law, we can write the equation for the particle executing simple harmonic motion
Comparing the equation (10.21) with simple harmonic motion equation (10.10), we get
which means the angular frequency or natural frequency of the oscillator is
Notice that in simple harmonic motion, the time period of oscillation is independent of amplitude. This is valid only if the amplitude of oscillation is small.
The solution of the differential equation of a SHM may be written as
where A, ω and ϕ are constants. General solution for differential equation 10.21 is x(t) = A sin(ωt +φ)+ B cos(ωt +φ) where A and B are contants.
Related Topics