Chapter: Civil : Structural dynamics of earthquake engineering
Response of structures to impulsive loads
Response
of structures to impulsive loads
Abstract: Impulsive
force is a force of large magnitude that acts over a short time
interval. In practice, vehicles and cranes are subjected to impulsive loads. In
this chapter, the response of the single-degree-of-freedom system with or
without damping subjected to impulsive loads is considered. The concept of
response spectrum, which is a very useful tool in the design, is also
illustrated.
Key words: impulsive loads, dynamic
magnification factor, shear frame, Duhamel integral, ramp, response
spectrum, Laplace transform.
Introduction
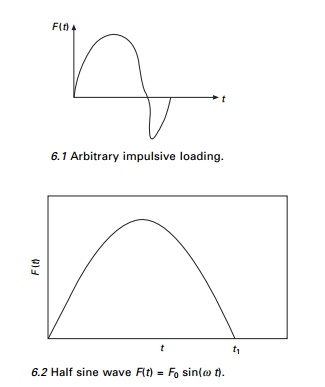
An impulsive load consists of a
single principal impulse as illustrated in Fig. 6.1. Such a load is generally
of short duration. Vehicles and cranes, etc., are subjected to impulsive loads.
The maximum response is reached due to impulsive loads within a short period of
time before damping forces absorb much energy. Hence for this reason only, an
undamped response to impulsive loads will be considered, and for completeness
an under-damped system subjected to impulsive load will also be discussed.
Impulsive loading ŌĆ' sine
wave
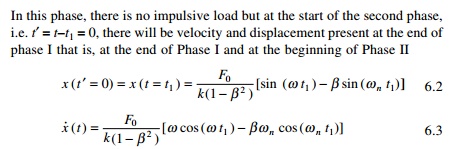
Consider a sine wave impulse as
shown in Fig. 6.2 with the duration of sine pulse as t1.
1.Phase I
During this phase, the structure is subjected to harmonic
loading starting from rest. The undamped response including transient and
steady state may be obtained as

![]() where ╬▓ is the frequency ratio, Žēn is the
natural frequency of the system and t1 is the time
duration of the pulse.
where ╬▓ is the frequency ratio, Žēn is the
natural frequency of the system and t1 is the time
duration of the pulse.
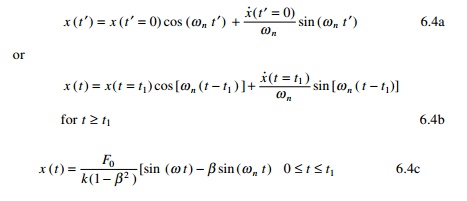
2.Phase II
In this phase, there is no impulsive load but at the start of
the second phase, i.e. tŌĆ▓ = tŌĆ't1
= 0, there will be velocity and displacement present at the end of phase I that
is, at the end of Phase I and at the beginning of Phase II
We have seen in 4th previous pages the
response of undamped system due to initial velocity and initial displacement is
given by
To find the maximum response velocity must be equated to zero.
Usually this occurs in Phase I.
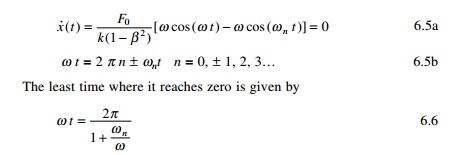
Hence maximum displacement can be obtained by substituting Žē t in Eq. 6.6 in Eq. 6.4c.
The result is valid only if Žē t
< 1 or ╬▓ < 1,
i.e. Žēn < Žē. For ╬▓ > 1 the maximum response
occurs in Phase II. The amplitude of vibration is given by
3. Case
1 When t1/Tn ŌēĀ
┬Į
Forced vibration phase
Free vibration phase
4.Case 2 When t1/Tn
= 1/2
Forced vibration phase
Free vibration phase
The above equation implies that the displacement in the forced
vibration phase reaches a maximum at the end of the phase.

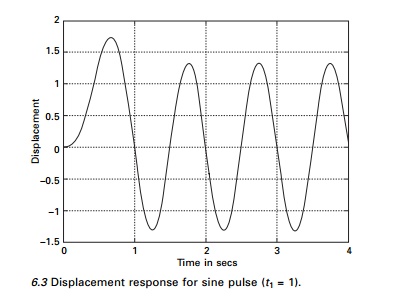
The displacement response for
sine pulse with duration of pulse t1 = 1s is shown in Fig.
6.3.
Maximum response
The maximum values of response
over each of the two phases, forced vibration and free vibration, are
determined separately. The larger of the two values is the overall maximum
response.
A program in MATLAB to obtain the maximum response for various
values of t1/Tn is given below.
Program 6.1: MATLAB program
to obtain maximum response for half sine cycle pulse
%Program to obtain maximum
response for half cycle pulse force %For various values of t1/Tn- Tn assumed as
1 rad/sec
for j=1:97 c(j)=(j-1)*0.0625
d=1/c(j); t1=c(j);
% time increment dt=0.002;
if c(j)==0.50 for i=1:2000 t(i)=dt*(i-1); if
t(i)<t1
y(i)=abs(0.5*(sin(2*pi*t(i))-2*pi*t(i)*cos(2*pi*t(i)))); else
y(i)=abs(0.5*pi*cos(2*pi*(t(i)-0.5))); end
end else
t1=c(j);
for i=1:2000 t(i)=dt*(i-1); if t(i)<t1
y(i)=((sin(pi*t(i)/t1)-d/2*sin(2*pi*t(i)))/(1-.25*d^2)); else
y(i)=(d*cos(pi*c(j))*sin(2*pi*(t(i)-c(j)/2))/((.25*d^2)-1)); end
end end
%DMF calculated for various
values of t1/Tn w(j)=max(y);
end w(1)=0; figure(1)
plot(c,w,ŌĆśkŌĆÖ)
xlabel(ŌĆś t1/TnŌĆÖ) ylabel(ŌĆś DMFŌĆÖ)
title(ŌĆś DMF for undamped system for various values of t1/TnŌĆÖ)
Figure 6.4 shows the shock spectrum (the relationship between
maximum response (DMF) and t1/Tn. DMF and
response ratio have the same meaning.
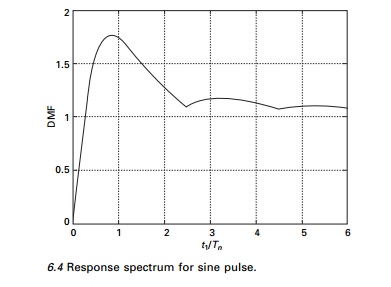
The response spectrum concept is
useful in design. A response spectrum is a plot of maximum peak response of the
single-degree-of-freedom (SDOF) system oscillator. Different types of shock
excitation result in different response spectra which will be discussed in
later in this page.
Response to other arbitrary
dynamic excitation
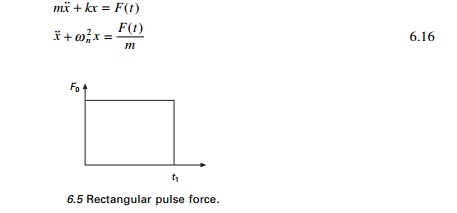
1.Rectangular pulse force
Next let us consider the case of a load F0
applied instantly to a structure. The force is suddenly removed after a finite
time t1 as shown in Fig. 6.5. Such ais known as force is
commonly denoted as rectangular pulse force and t1 duration. When t1
tends to infinity then the load is a suddenly applied load. The
rectangular pulse force is a representative example of an impulsive or shock
loading of short duration. Consequently, the response is not significantly
affected by the presence of damping in the system. Hence the effect of damping
is neglected in the following discussion. The forcing function of the
rectangular pulse is defined as

The equation of motion for undamped forced vibration can be
written as
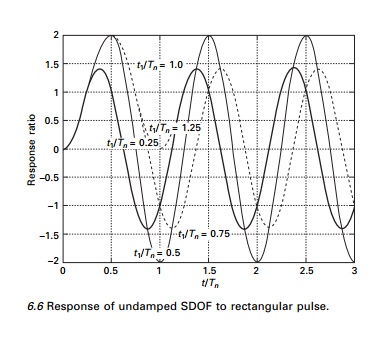
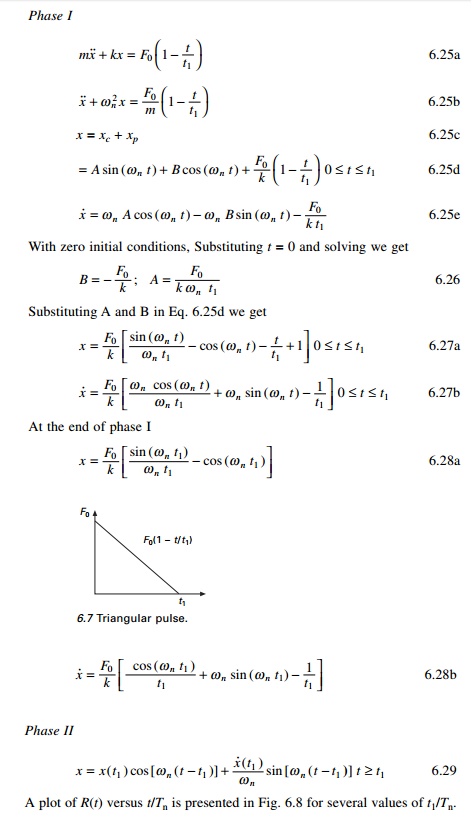
Phase I
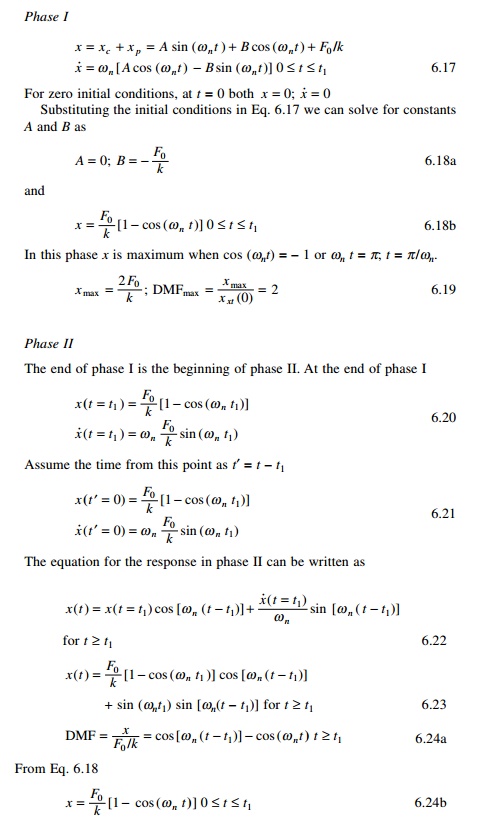
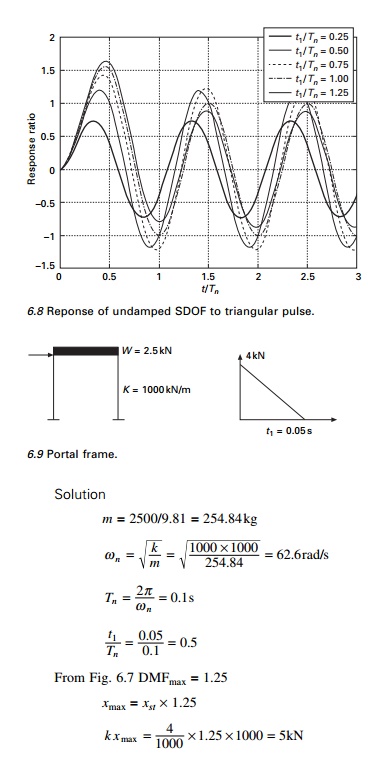
A plot of R(t) vs t/Tn
is presented in Fig. 6.6 for several values of t1/Tn.
It is obvious from these plots that during the forced vibration phase, the
system oscillates about the static displacement position at its natural period Tn.
In the transient phase t tending to t1, the system
oscillates about its original equilibrium position. Examining Fig. 6.5 reveals
that maximum displacement for the forced vibration phase = Rmax
= 2. This can occur when cos(Žē t) = ŌĆ' 1 or Žē t = ŽĆ or 2ŽĆ/Tn
t = ŽĆ or t/Tn
= 0.5 or t must be equal to 0.5 Tn to yield Rmax
= 2. Thus the maximum displacement response occurs in the forced vibration
phase when t1 > Tn/2.
2.Triangular pulse force
A triangular pulse force as shown
in Fig. 6.7 is usually employed to simulate a blast. The load F0
is instantly applied to the structure and decreased linearly over the time
duration t1.
Phase I
Example 6.1
The shear frame (moment of inertia of the beam is very high)
shown in Fig. 6.9 is constructed of a rigid girder and flexible column. The
frame supports uniformly distributed load having a total weight of 2.5kN. The
frame is
subjected to an impulsive load of
triangular pulse as shown in Fig. 6.9 at girder level. Determine the shear in
the column.
Duhamel integral
In previous page, it was shown
that for any periodic function represented by a trigonometric series, the analysis
can be extended by using the principle of superposition to include the solution
for a general periodic forcing function.
6.5.1 Physical
approach
Figure 6.10 shows an arbitrary forcing function in which
exciting force is applied at t = 0. The forcing function can be
considered as made up of thin strips like F(Žä) dŽä summed up.
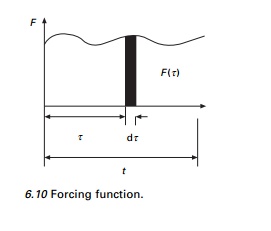
Consider a small strip alone as shown in Fig. 6.11. According
to NewtonŌĆÖs second law
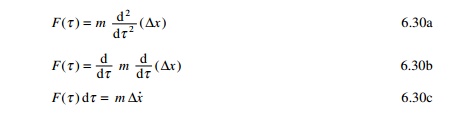
F(Žä) dŽä is called
the linear impulse and m Ōłåx╦Ö is the
momentum. The impulse produces a velocity of Ōłåx╦Ö without
any displacement. Hence Ōłåx when t
> Žä can be written as
The above integral is known as the Duhamel integral or the
convolution integral. For a viscously under-damped system
2.Formal approach
Steps: The differential equation of motion for an undamped system
with an exerting force F(Žä) is
Multiplying both sides by sin Žēn(t
ŌĆ' Žä) and integrating, this becomes
Substituting the limits of integration we get,
If initial displacement and velocity are zero then the
response becomes
![]()
Response to arbitrary
dynamic excitation
To illustrate the application of
the Duhamel integral in evaluating the response of an SDOF system to
arbitrary excitation, several classical load functions are considered.
1. Ideal step force
Consider a suddenly applied force of the F0
that remains constant at all times as shown in Fig. 6.12. For an undamped
system
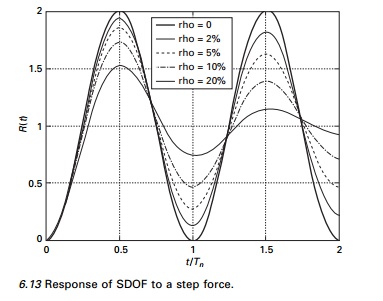
A plot of DMF(t) versus t/Tn
is presented in Fig. 6.13 for several levels of damping. DMF(t) = 1 on
the response ratio plot corresponds to static displacement position and DMF(t)
>1 represents displacement beyond the static displacement position or overshoot.
For an undamped system subjected to step force, the resulting response is
oscillating motion about the static displacement position with maximum values
of DMFmax = 2. In a damped system, the response ratio gradually
approaches static values of 1 after a number of cycles of damped oscillation.
The maximum overshoot in a damped system as well as the rate of decay of the
oscillation about static equilibrium position depends on the damping factor as
illustrated in Fig. 6.13.
2. Program
6.2: MATLAB program to find the response for step force
%program for finding max dynamic response factor for given
loading
%define damping ratios for which
response is required rho=[0 0.02 0.05 0.1 0.2]
for jj=1:5 zeta=rho(jj);
%assume natural period 1 wn=2*pi;
%assume
mass =1
m=1;
% find natural frequency of
damped system wd=wn*sqrt(1-zeta^2);
ts=0.002; %sampling period N=1000
% sampling points
%force is defined for ideal step
force for n=1:N
t(n)=ts*(n-1); f(n)=1;
end figure(1) plot(t,f)
xlabel(ŌĆś time in secsŌĆÖ) ylabel(ŌĆś force ŌĆś)
title(ŌĆś force definitionŌĆÖ)
n=[1:N]
g=ts*exp(-(n-1)*zeta*wn*ts).*sin((n-1)*wd*ts)/(m*wd);
c0=conv(f,g);
for i=1:N tt(i)=(i-1)*ts;
c1(i)=abs(c0(i)*wn^2); end
figure(2)
plot(tt,c1,ŌĆśkŌĆÖ) hold on
end gtext(ŌĆśrho=0ŌĆÖ)
gtext(ŌĆśrho=2%ŌĆÖ) gtext(ŌĆśrho=5%ŌĆÖ) gtext(ŌĆśrho=10%ŌĆÖ) gtext(ŌĆśrho=20%ŌĆÖ) xlabel(ŌĆś
t/TnŌĆÖ); ylabel(ŌĆś R(t)ŌĆÖ)
title(ŌĆś Response of SDOF to ideal step forceŌĆÖ)
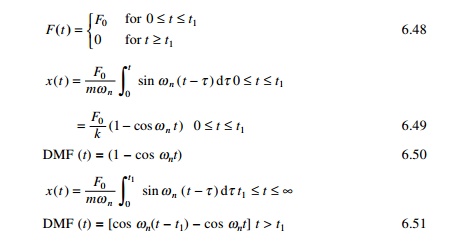
3 Rectangular pulse force
Let us consider the case of load F0 applied
instantly to a structure for a finite time duration of t1
known as rectangular pulse.
Undamped system
For an under-damped system similar to Eq. 6.47, the response
can be derived.
Several plots of DMF(t) as
a function of t/Tn for several values of t1/Tn
are presented in Fig. 6.14. It is seen that DMFmax = 2 which can
occur at cos Žēn t =
ŌĆ'1.
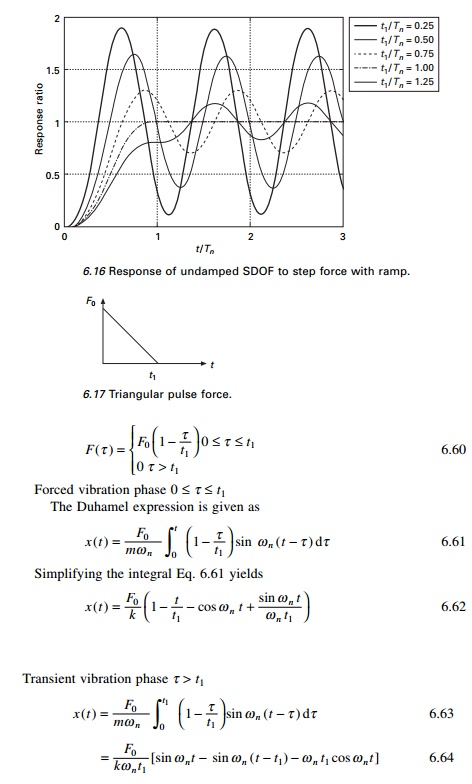
4 Step
force with ramp
Consider a force which is applied
over a finite time t1. Such a forcing function is called a
ramp function and is shown in Fig. 6.15. The dynamic response is significantly
affected by t1/Tn.
The Duhamel integral for the loading in the time interval 0 Ōēż t Ōēż
t1
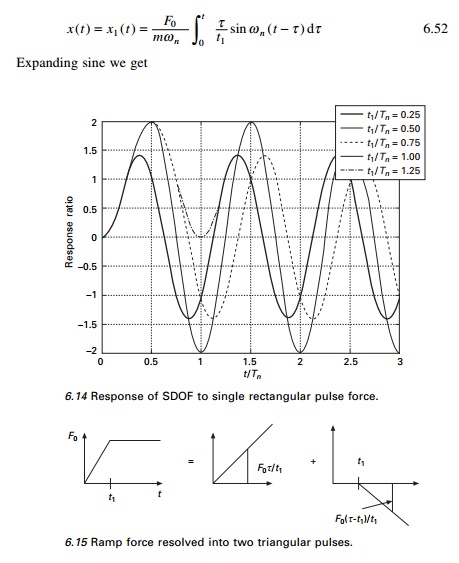
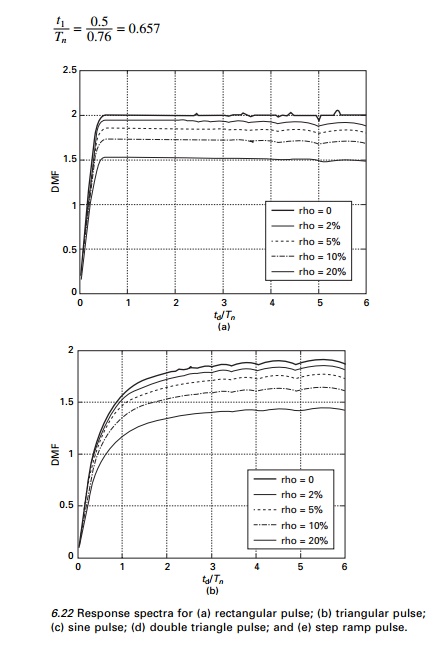
Figure 6.16 shows the plot of
response ratio values versus t/Tn for several ratios
of t1/Tn. These plots indicate that as t1
approaches zero (t1/Tn << 1) the
response approaches that of an ideal step function. Dynamic effects can be
ignored for ramp forces if t1/Tn > 3.0.
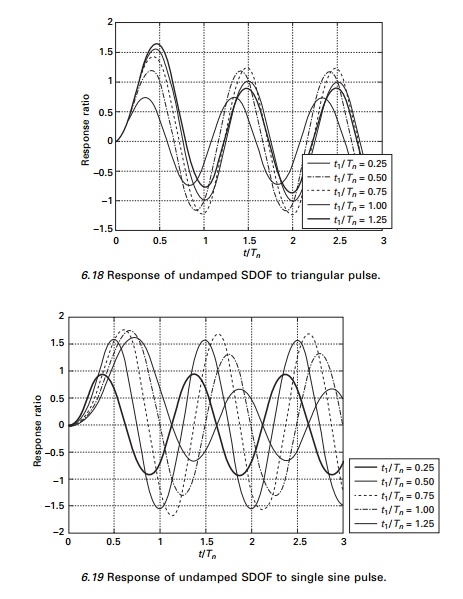
6.6.5 Triangular pulse force
A load function often employed to simulate blast is the
triangular pulse shown in Fig. 6.17. The load F0 is instantly
applied to the structure and decreases linearly over the time duration t1.
Once the Duhamel integral has been evaluated for a specific
forcing function, the result may be used to evaluate response of any SDOF
system to that particular type of loading. Figure 6.18 depicts the plot of
response ratio versus t/Tn for triangular loading for
several values of t1/Tn, the overshoot becomes
less with smaller oscillations above the static displacement position.
Similarly such curves are drawn for step single sine pulse and double triangle,
in Figs 6.19 and 6.20 respectively.
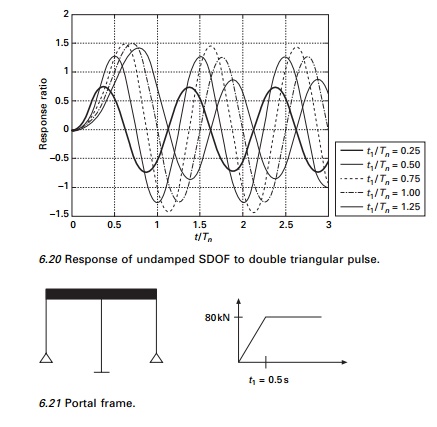
Example 6.2
The shear frame shown in Fig. 6.21 is constructed of rigid
girder and flexible columns. The frame supports uniformly distributed load of
total weight of 120kN and the frame is subjected to step force with a ramp as
shown in Fig. 6.21 at the girder level. Determine the horizontal displacement
at t = 0.75s. E = 200 GPa and damping can be assumed as zero.
Moment of inertia of end columns and centre column are 3.4465eŌĆ'5mm4
and 7.07eŌĆ'5mm4 respectively.

The Duhamel method is a closed form procedure for calculating
a system response to arbitrary dynamic excitation. But evaluation of the
integral is cumbersome as evidenced in previous sections. But with the MATLAB
and MATHEMATICA packages these convolution integrals may be evaluated quite
easily. It is not possible to apply a closed form procedure for earthquake
ground motion since ground motion recordings are in digitized form. In such
cases a numerical procedure is resorted to.
Response spectrum
A shock represents a sudden
application of force or other form of disruption which results in a transient
response of a system. The maximum value of the response is a good measure of
the severity of the shock and is of course dependent upon dynamic
characteristics of the system. In order to categorize all types of shock
excitation an SDOF system oscillator is chosen as the standard.
The response spectrum
concept is useful in design. A response spectrum is a plot of maximum
peak response of the SDOF system oscillator. Different types of shock
excitation result in different response spectra. It is possible to have similar
response spectra for two different shock excitation. In spite of this
limitation, the response spectrum is a useful concept that is extensively used.
Consider the excited force function as F(Žä) = F0f
(Žä) and the response for SDOF of an
undamped system as given by
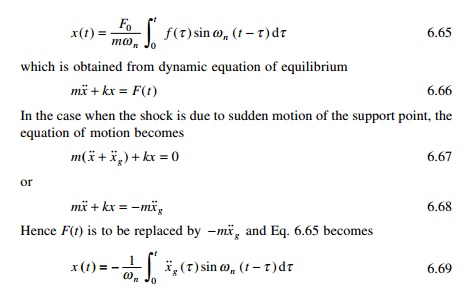
The inner product given in the
integral is f(Žä) sin Žēn(t
ŌĆ' Žä) and the integral is known as
the convolution integral. MATLAB can calculate a convolution integral very
easily.
Program 6.3: MATLAB
program to find the response spectrum for any load pulse
%program for finding max dynamic response factor for given
loading
%define damping ratios for which
response is required rho=[0 0.02 0.05 0.1 0.2]
for jj=1:5 zeta=rho(jj);
%define the fac=td/Tn= duration
of loading / natural period for ii=1:193
fac(ii)=0.03125*(ii-1);
td=0.1; %period of forcing
function
%natual
frequency of the system
wn=fac(ii)*2*pi/td;
%assume mass =1 m=1;
%find natural frequency of damped
system wd=wn*sqrt(1-zeta^2);
ts=0.002; %sampling period N=1000
% sampling points load=1
%force is defined for rectangular pulse
for n=1:N t(n)=ts*(n-1); if n>td/ts+1
f(n)=0;
else
f(n)=1;
end end %load=2
%force is defined for triangular
load %for n=1:N
%t(n)=ts*(n-1);
%if
n>td/ts+1
%f(n)=0;
%else
%f(n)=1-t(n)/td;
%end
%end
%load=3
%force is
defined for sinusoidal loading
%defining
force
%for n=1:N
%t(n)=ts*(n-1);
%if
n>td/ts+1
%f(n)=0;
%else
%f(n)=sin(pi*t(n)/td);
%end
%end
%load=4;
%force is defined for double triangular load
%for n=1:N
%t(n)=ts*(n-1);
%if
n<=(td/2)/ts+1
%f(n)=2.0*(n-1)*ts/td;
%else
%f(n)=2.0*(1-(n-1)*ts/td);
%end
%if
n>td/ts+1;
%f(n)=0;
end
%end
%load=5
force is defined as ramp loading
%for n=1:N
%t(n)=ts*(n-1);
%if
n>td/ts+1
%f(n)=1;
%else
%f(n)=t(n)/td;
%end
%end
figure(1)
plot(t,f)
xlabel(ŌĆś time in secsŌĆÖ) ylabel(ŌĆś
force ŌĆÖ)
title(ŌĆś force definitionŌĆÖ)
n=[1:N]
g=ts*exp(-(n-1)*zeta*wn*ts).*sin((n-1)*wd*ts)/(m*wd);
c0=conv(f,g);
for i=1:N tt(i)=(i-1)*ts; c1(i)=c0(i)*wn^2;
end dmf(ii)=max(abs(c1)); end
if load<4 dmf(1)=0
else end
figure(2)
plot(fac,dmf,ŌĆśkŌĆÖ) hold on
end gtext(ŌĆśrho=0ŌĆÖ)
gtext(ŌĆśrho=2%ŌĆÖ) gtext(ŌĆśrho=5%ŌĆÖ) gtext(ŌĆśrho=10%ŌĆÖ) gtext(ŌĆśrho=20%ŌĆÖ) xlabel(ŌĆś
td/TnŌĆÖ); ylabel(ŌĆś DMFŌĆÖ)
title(ŌĆś Response spectrum for the given loadingŌĆÖ)
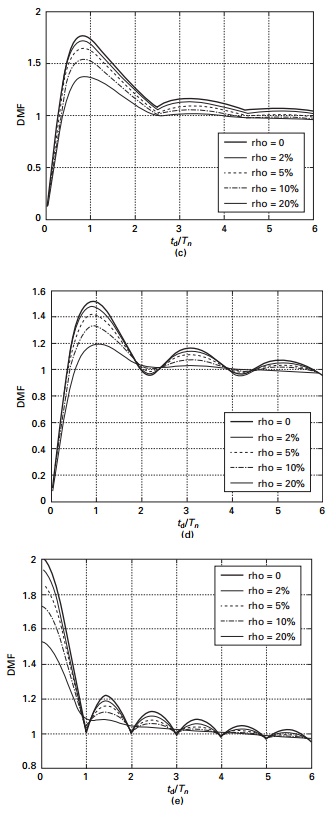
The responses spectrum for (a) rectangular pulse, (b)
triangular pulse, (c) sine pulse, (d) double triangle pulse and (e) step ramp
loadings are shown in Fig. 6.22.
Example 6.3
Determine the maximum horizontal displacement of structural
frame when subjected to ramp loading as given in Example 6.2.
DMFmax
= 1.5
xmax = 1.5 ├- 0.096 = 0.144m
The construction of response
spectrum can be greatly facilitated through numerical evaluation techniques.
The construction of a response spectrum by numerical integration is addressed
in later chapters. Once constructed, the response spectrum offers the design
engineer an opportunity to evaluate the response of a wide frequency range of
structures to a specific input.
Laplace transform
The Laplace transform method of solving the
differential equation provides a complete solution, yielding both transient and
forced vibrations. Here in we give a brief introduction of the theory and
illustrate with some examples.
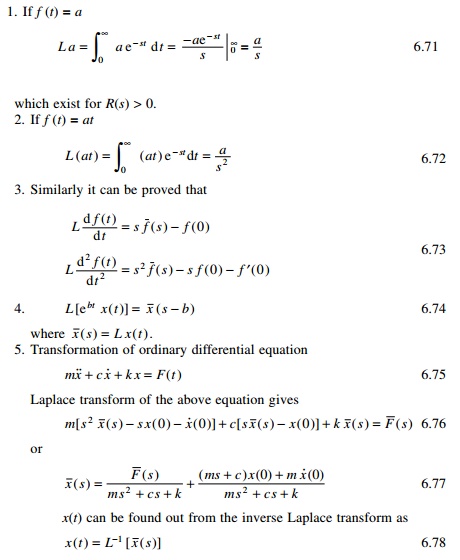
If f (t) is a function of t for t
> 0 its Laplace transform f (s) is defined as

where ŌĆśsŌĆÖ is a complex variable. For the real part of s
> 0 the integral exists provided f (t) is absolutely
integrable function in the time interval 0 to infinity.
For Laplace transform of simpler
expressions, the reader may consult any mathematics handbook or one can use the
MATHEMATICA package to obtain both Laplace transform and inverse Laplace
transform.
Example 6.4
Write a MATHEMATICA program to obtain the motion of the mass
subjected to initial conditions. There is no external forcing function. The
SDOF system is shown in Fig. 6.23; m = 4kg, K = 10N/m; c =
6Ns/m and at t = 0 x (0) = 0.1m and
x˙ (0) = 0.16m/s.
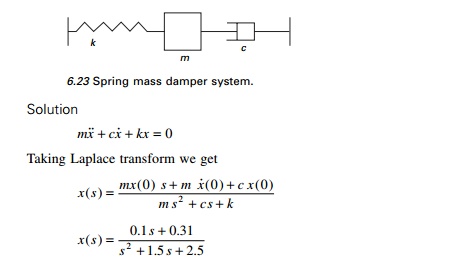
Taking inverse transform of the
above equation, we get x(t) which is given in the MATHEMATICA
program.
Example 6.5
For the same problem, when 20N force (step input) is applied
and the system is at rest initially.
Taking inverse transform we get x(t) which is
given in MATHEMATICA program.
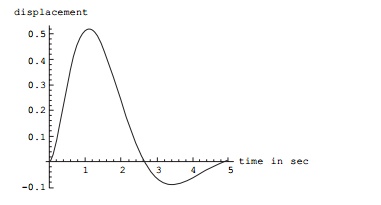
Example 6.6
When F(t) = 20eŌĆ'2t.
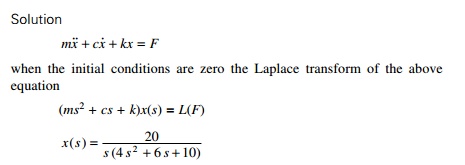
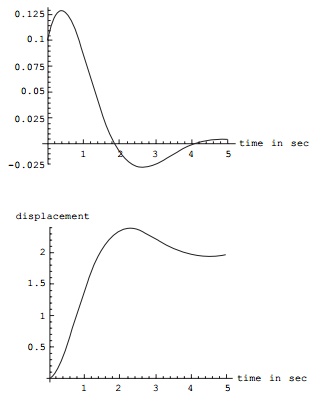
Solution
Program 6.4:
MATHEMATICA program for Laplace transform method
f=InverseLaplaceTransform[(.1 *s+0.31)/
(s^2+1.5*s+2.5),s,t]
E^((-0.75 -
1.3919410907075054*I)*t)* (0.05000000000000001 + 0.08441449195258423*I + (0.05
-0.08441449195258421*I)* E^(2.7838821814150108*I*t)) f
E^((-0.75 - 1.3919410907075054*I)*t) *(0.05000000000000001 +
0.08441449195258423*I + (0.05 -
0.08441449195258421*I)*E^(2.7838821814150108*I*t)) Plot[f,{t,0,5},AxesLabelŌå'{ŌĆ£time in secŌĆØ,
ŌĆ£displacementŌĆØ},PlotStyleŌå'{Thickness[0.008]}]
g=InverseLaplaceTransform[(20)/(s*(4*s^2+6*s+10)),s,t]
2/31*(31 -
(31*Cos[(Sqrt[31]*t)/4])/E^((3*t)/4) -
(3*Sqrt[31]*Sin[(Sqrt[31]*t)/4])/E^((3*t)/4))
Plot[g,{t,0,5},AxesLabel├å{ŌĆ£time in secŌĆØ,
ŌĆ£displacementŌĆØ},PlotStyle├å{Thickness[0.008]}]
h=InverseLaplaceTransform[(20)/
((s+3)*(4*s^2+6*s+10)),s,t]
(5/217*(31 - 31*E^((9*t)/4)*Cos[(Sqrt[31]*t)/4] +
9*Sqrt[31]*E^((9*t)/4)*Sin[(Sqrt[31]*t)/4]))/E^(3*t)
Plot[h,{t,0,5},AxesLabelŌå'{ŌĆ£time in secŌĆØ, ŌĆ£displacementŌĆØ},PlotStyleŌå'{Thickness[0.008]}]
Summary
In this chapter, the response spectrum is constructed only for
certain loads such as rectangular, triangular, double triangle, sine and ramp
pulses. For any other general pulses, the numerical technique as addressed in
Chapter 7 should be used. Once constructed, the response spectrum offers the
design engineer the opportunity to evaluate the maximum response of a wide
frequency range of structures to a specific input. Application of the response
spectrum will follow in later chapters for earthquake loading.
Related Topics