Chapter: Artificial Intelligence
AO* Search(Graph): Concept, Algorithm, Implementation, Advantages, Disadvantages
AO* Search: (And-Or) Graph
The Depth first search and Breadth first search given earlier for OR
trees or graphs can be easily adopted by AND-OR graph. The main difference lies
in the way termination conditions are determined, since all goals following an
AND nodes must be realized; where as a single goal node following an OR node
will do. So for this purpose we are using AO* algorithm.
Like A* algorithm here we will use two arrays and one heuristic
function.
OPEN:
It contains the nodes that has been traversed but yet not been marked
solvable or unsolvable.
CLOSE:
It contains the nodes that have already been processed.
6 7:The distance from current node to goal node.
Algorithm:
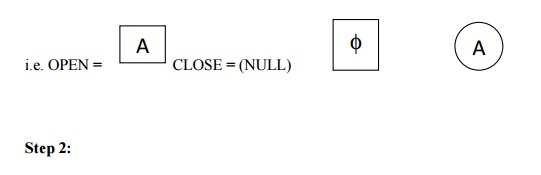
Step 1: Place the starting node into OPEN.
Step 2: Compute the most promising solution tree say T0.
Step 3: Select a node n that is both on OPEN and a member of T0. Remove it from
OPEN and place it in
CLOSE
Step 4: If n is the terminal goal node then leveled n as solved and leveled all
the ancestors of n as solved. If the
starting node is marked as solved then success and exit.
Step 5: If n is not a solvable node, then mark n as unsolvable. If starting node
is marked as unsolvable, then return
failure and exit.
Step 6: Expand n. Find all its successors and find their h (n) value, push them
into OPEN.
Step 7: Return to Step 2.
Step 8: Exit.
Implementation:
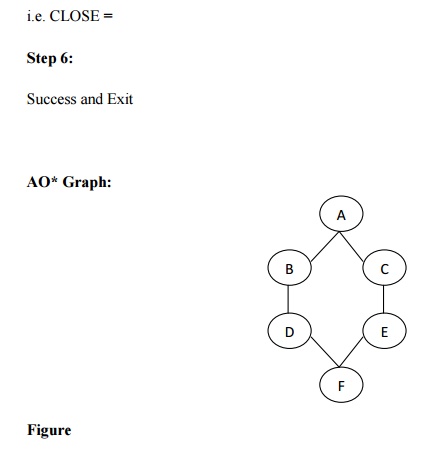
Let us take the following example to implement the AO* algorithm.
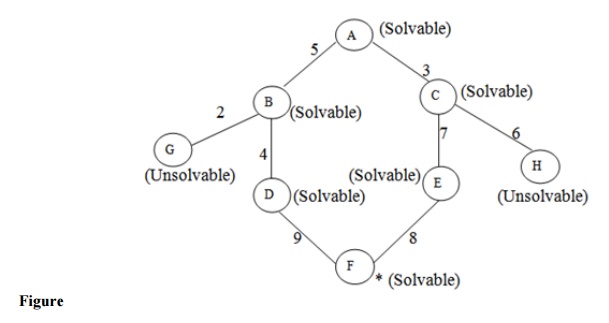
Step 1:
In the above graph, the solvable nodes are A, B, C, D, E, F and the
unsolvable nodes are G, H. Take A as the starting node. So place A into OPEN.
Advantages:
It is an optimal algorithm.
If traverse according to the ordering of nodes. It
can be used for both OR and AND graph.
Disadvantages:
Sometimes for unsolvable nodes, it can’t find the
optimal path. Its complexity is than other algorithms.
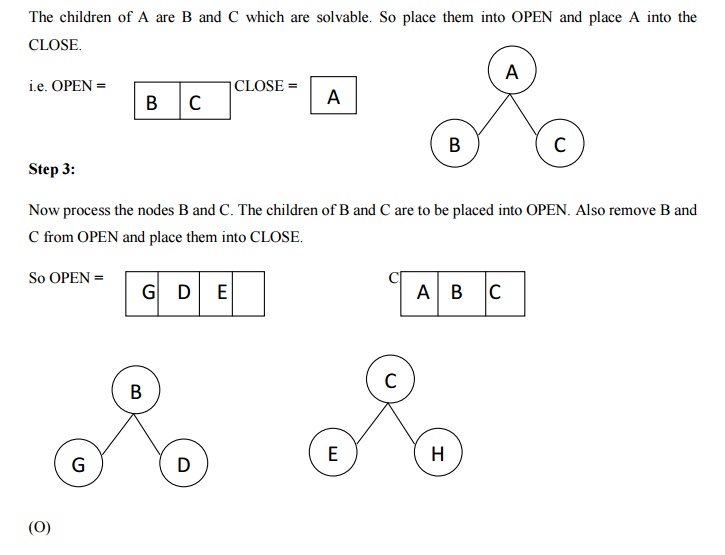
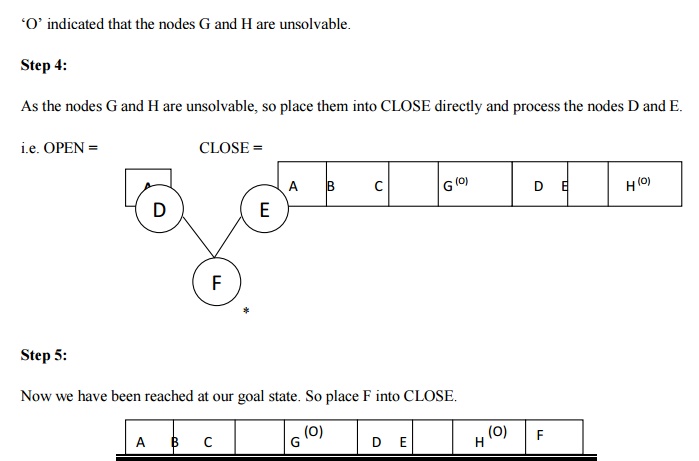
Related Topics