Chapter: Artificial Intelligence(AI) : Introduction to AI And Production Systems
What is Artificial intelligence(AI)?
What is Artificial
intelligence(AI)?
Artificial intelligence (AI) is the intelligence exhibited by machines or software.
It is also the name of the academic field of study which studies how to create computers and computersoftware that are capable of intelligent behavior.
The central problems (or goals) of AI research include reasoning, knowledge,
planning, learning, natural language processing (communication), perception and
the ability to move and manipulate objects.
Example
Cleverbot
Cleverbot
is a chatterbot that’s modeled after human behavior and able to hold a
conversation. It does so by remembering words from conversations. The responses
are not programmed. Instead, it finds keywords or phrases that matches the input
and searches through its saved conversations to find how it should respond to
the input.
MySong
MySong is
an application which can help people who has no experience in write a song or
even can not play any instrument, to create original music by themselves. It
will automatically choose chords to accompany the vocal melody that you have
just inputed by microphone. In the other hand, MySong can help songwriters to
record their new ideas and melodies no matter where and when they are. But
MySong is not a professional application which can produce or edit your song,
then it means you have to use other tools or software to really develop a song.
Artificial Intelligence in Video Games
The AI
components used in video games is often a slimmed down version of a true AI
implementation, as the scope of a video game is often limited (ie Console
memory capacity). The most innovative use of AI is garnered on Personal
Computers, whose memory capabilities are adjustable beyond the capacity of
modern gaming consoles.
Some
examples of AI components typically used in video games are Path Finding,
Adaptiveness (learning), perception, and planning (decision making).
The
present state of video games can offer a variety of "worlds" for AI
concepts to be tested in, such as a static or dynamic environment,
deterministic or non-deterministic transitioning, and fully or partially known
game worlds. The real-time performance constraint of AI in video game
processing must also be considered, which is another contributing factor to why
video games may choose to implement a "simple" AI, ie: finite state
machine as AI, which may not even be considered Artifical Intelligence at
heart.
Artificial Intelligence in Mobile System
As
smartphone come into our daily life, we need to the make our device even more
clever. Recently, researchers are trying to apply traditional AI techniques
into mobile environment. Those techniques, including speech recognition,
machine learning, classification and natural language processing give us a more
powerful application, such as SIRI on iOS, kinect from Microsoft. AI on mobile
device introduces some new challenges, such as limited computation resource and
energy consumption etc.
History of AI
Cybernetics
and early neural networks Turing's test
Game AI
Symbolic
reasoning and the Logic Theorist AI
Problem Formulation
States
possible world states accessibility the agent can determine via its sensors in
which state it is consequences of actions the agent knows the results of its
actions levels problems and actions can be specified at various levels
constraints conditions that influence the problem-solving process Performance
measures to be applied costs utilization of resources
Problem Types
single-state
problem
multiple-state
problem
contingency
problem exploration problem
Single-State Problem
Exact
prediction is possible state is known exactly after any sequence of actions
accessibility of the world all essential information can be obtained through
sensors consequences of actions are known to the agent goal
for each
known initial state, there is a unique goal state that is guaranteed to be
reachable via an action sequence simplest case, but severely restricted
Multiple-State Problem
Semi-exact
prediction is possible state is not known exactly, but limited to a set of
possible states after each action accessibility of the world not all essential
information can be obtained through sensors reasoning can be used to determine
the set of possible states consequences of actions are not always or completely
known to the agent; actions or the environment might exhibit randomness goal
due to ignorance, there may be no fixed action sequence that leads to the goal
less restricted, but more complex.
Contingency Problem
Exact
prediction is impossible state unknown in advance, may depend on the outcome of
actions and changes in the environment accessibility of the world some
essential information may be obtained through sensors only at execution time
consequences of actions may not be known at planning time goal instead of
single action sequences, there are trees of actions contingency branching point
in the tree of actions agent design different from the previous two cases: the
agent must act on incomplete plans
Exploration Problem
Effects
of actions are unknown state the set of possible states may be unknown
accessibility of the world some essential information may be obtained through
sensors only at execution time consequences of actions may not be known at
planning time goal can’t be completely formulated in advance because states and
consequences may not be known at planning time discovery what states exist
experimentation what are the outcomes of actions learning remember and evaluate
experiments
MATCHING
Clever
search involves choosing from among the rules that can be applied at a
particular point, the ones that are most likely to lead to a solution. We need
to extract from the entire collection of rules, those that can be applied at a
given point. To do so requires some kind of matching between the current state
and the preconditions of the rules.
How
should this be done?
One way
to select applicable rules is to do a simple search through all the rules
comparing one’s preconditions to the current state and extracting all the ones
that match . this requires indexing of all the rules. But there are two
problems with these simple solutions:
It
requires the use of a large number of rules. Scanning through all of them would
be hopelessly inefficeint.
It is not
always immediately obvious whether a rule’s preconditions are satisfied by a
particular state.
Sometimes
, instead of searching through the rules, we can use the current state as an
index into the rules and select the matching ones immediately. In spite of
limitations, indexing in some form is very important in the efficient operation
of rules based systems.
A more
complex matching is required when the preconditions of rule specify required
properties that are not stated explicitly in the description of the current
state. In this case, a separate set of rules must be used to describe how some
properties can be inferred from others. An even more complex matching process
is required if rules should be applied and if their pre condition approximately
match the current situation. This is often the case in situations involving
physical descriptions of the world.
LEARNING
Learning
is the improvement of performance with experience over time.
Learning
element is the portion of a learning AI system that decides how to modify the
performance element and implements those modifications.
We all
learn new knowledge through different methods, depending on the type of
material to be learned, the amount of relevant knowledge we already possess,
and the environment in which the learning takes place. There are five methods
of learning . They are,
Memorization
(rote learning)
Direct
instruction (by being told)
Analogy
Induction
Deduction
Learning
by memorizations is the simplest from of le4arning. It requires the least
amount of inference and is accomplished by simply copying the knowledge in the
same form that it will be used directly into the knowledge base.
Example:-
Memorizing multiplication tables, formulate , etc.
Direct
instruction is a complex form of learning. This type of learning requires more
inference than role learning since the knowledge must be transformed into an
operational form before learning when a teacher presents a number of facts
directly to us in a well organized manner.
Analogical
learning is the process of learning a new concept or solution through the use
of similar known concepts or solutions. We use this type of learning when
solving problems on an exam where previously learned examples serve as a guide
or when make frequent use of analogical learning. This form of learning
requires still more inferring than either of the previous forms. Since
difficult transformations must be made between the known and unknown
situations.
Learning
by induction is also one that is used frequently by humans . it is a powerful
form of learning like analogical learning which also require s more inferring
than the first two methods. This learning re quires the use of inductive
inference, a form of invalid but useful inference. We use inductive learning of
instances of examples of the concept. For example we learn the
concepts
of color or sweet taste after experiencing the sensations associated with
several examples of colored objects or sweet foods.
Deductive
learning is accomplished through a sequence of deductive inference steps using
known facts. From the known facts, new facts or relationships are logically
derived. Deductive learning usually requires more inference than the other
methods.
Review
Questions:-
what is perception
?
How do we
overcome the Perceptual Problems?
Explain
in detail the constraint satisfaction waltz algorithm?
What is
learning ?
What is
Learning element ?
List and
explain the methods of learning?
Types of
learning:- Classification or taxonomy of learning types serves as a guide in
studying or comparing a differences among them. One can develop learning
taxonomies based on the type of knowledge representation used (predicate
calculus , rules, frames), the type of knowledge learned (concepts, game
playing, problem solving), or by the area of application(medical diagnosis ,
scheduling , prediction and so on).
The
classification is intuitively more appealing and is one which has become
popular among machine learning researchers . it is independent of the knowledge
domain and the representation scheme is used. It is based on the type of
inference strategy employed or the methods used in the learning process. The
five different learning methods under this taxonomy are:
Memorization
(rote learning)
Direct
instruction(by being told)
Analogy
Induction
Deduction
Learning
by memorization is the simplest form of learning. It requires the least5 amount
of inference and is accomplished by simply copying the knowledge in the same
form that it will be used directly into the knowledge base. We use this type of
learning when we memorize multiplication tables ,
for
example.
A
slightly more complex form of learning is by direct instruction. This type of
learning requires more understanding and inference than role learning since the
knowledge must be transformed into an operational form before being integrated
into the knowledge base. We use this type of learning when a teacher presents a
number of facts directly to us in a well organized manner.
The third
type listed, analogical learning, is the process of learning an ew concept or
solution through the use of similar known concepts or solutions. We use this
type of learning when solving problems on an examination where previously
learned examples serve as a guide or when we learn to drive a truck using our
knowledge of car driving. We make frewuence use of analogical learning. This
form of learning requires still more inferring than either of the previous
forms, since difficult transformations must be made between the known and
unknown situations. This is a kind of application of knowledge in a new
situation.
The
fourth type of learning is also one that is used frequency by humans. It is a
powerful form of learning which, like analogical learning, also requires more
inferring than the first two methods. This form of learning requires the use of
inductive inference, a form of invalid but useful inference. We use inductive
learning when wed formulate a general concept after seeing a number of instance
or examples of the concept. For example, we learn the concepts of color sweet
taste after experiencing the sensation associated with several examples of
colored objects or sweet foods.
The final
type of acquisition is deductive learning. It is accomplished through a
sequence of deductive inference steps using known facts. From the known facts,
new facts or relationships are logically derived. Deductive learning usually
requires more inference than the other methods. The inference method used is,
of course , a deductive type, which is a valid from of inference.
In
addition to the above classification, we will sometimes refer to learning
methods as wither methods or knowledge-rich methods. Weak methods are general
purpose methods in which little or no initial knowledge is available. These
methods are more mechanical than the classical AI knowledge
rich
methods. They often rely on a form of heuristics search in the learning
process.
Heuristic Search
All of
the search methods in the preceding section are uninformed in that they did not
take into account the goal. They do not use any information about where they
are trying to get to unless they happen to stumble on a goal. One form of
heuristic information about which nodes seem the most promising is a heuristic
function h(n), which takes a node n and returns a non-negative real number
that is an estimate of the path cost from node n to a goal node. The function h(n)
is an underestimate if h(n) is less than or equal to the actual
cost of a lowest-cost path from node n to a goal.
The
heuristic function is a way to inform the search about the direction to a goal.
It provides an informed way to guess which neighbor of a node will lead to a
goal.
There is nothing
magical about a heuristic function. It must use only information that can be
readily obtained about a node. Typically a trade-off exists between the amount
of work it takes to derive a heuristic value for a node and how accurately the
heuristic value of a node measures the actual path cost from the node to a
goal.
A
standard way to derive a heuristic function is to solve a simpler problem and
to use the actual cost in the simplified problem as the heuristic function of
the original problem.
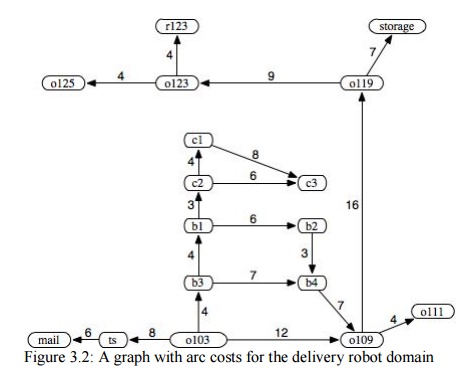
The straight-line
distance in the world between the node and the goal position can be used as the
heuristic function. The examples that follow assume the following heuristic
function: h(mail) = 26 h(ts) = 23 h(o103) = 21
h(o109) = 24 h(o111) = 27 h(o119) = 11
h(o123) = 4 h(o125) = 6 h(r123) = 0
h(b1) = 13 h(b2) = 15 h(b3) = 17
h(b4) = 18 h(c1) = 6 h(c2)
= 10
h(c3) = 12 h(storage) = 12
This h function is an underestimate because
the h value is less than or equal to
the exact cost of a lowest-cost path from the node to a goal. It is the exact
cost for node o123. It is very much
an underestimate for node b1, which
seems to be close, but there is only a long route to the goal. It is very
misleading for c1, which also seems
close to the goal, but no path exists from that node to the goal.
where the
state space includes the parcels to be delivered. Suppose the cost function is
the total distance traveled by the robot to deliver all of the parcels. One
possible heuristic function is the largest distance of a parcel from its
destination. If the robot could only carry one parcel, a possible heuristic
function is the sum of the distances that the parcels must be carried. If the
robot could carry multiple parcels at once, this may not be an underestimate of
the actual cost.
The h function can be extended to be
applicable to (non-empty) paths. The heuristic value of a path is the heuristic
value of the node at the end of the path. That is:
h( no,...,nk )=h(nk)
A simple
use of a heuristic function is to order the neighbors that are added to the
stack representing the frontier in depth-first search. The neighbors can be
added to the frontier so that the best neighbor is selected first. This is
known as heuristic depth-first search.
This search chooses the locally best path, but it explores all paths from the selected path before it selects
another path. Although it is often used, it suffers from the problems of
depth-fist search.
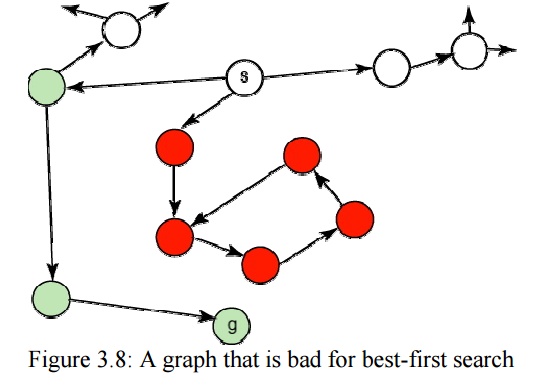
Another
way to use a heuristic function is to always select a path on the frontier with
the lowest heuristic value. This is called best-first
search. It usually does not work very well; it can follow paths that look promising because they are close to the goal,
but the costs of the paths may keep increasing.
PROBLEM CHARACTERISTICS
Heuristic search is a very general method
applicable to a large class of problem . It includes a variety of techniques.
In order to choose an appropriate method, it is necessary to analyze the
problem with respect to the following considerations.
Is the problem decomposable ?
A very large and composite problem can be easily
solved if it can be broken into smaller problems and recursion could be used.
Suppose we want to solve.
Ex:- ∫
x2 + 3x+sin2x cos 2x dx
This can be done by breaking it into three smaller
problems and solving each by applying specific rules. Adding the results the
complete solution is obtained.
2. Can solution steps be ignored or undone?
Problem fall under three classes ignorable ,
recoverable and irrecoverable. This classification is with reference to the
steps of the solution to a problem. Consider thermo proving. We may later find
that it is of no help. We can still proceed further, since nothing is lost by
this redundant step. This is an example of ignorable solutions steps.
Now consider the 8 puzzle problem tray and arranged
in specified order. While moving from the start state towards goal state, we
may make some stupid move and consider theorem proving. We may proceed by first
proving lemma. But we may backtrack and undo the unwanted move. This only
involves additional steps and the solution steps are recoverable.
Lastly consider the game of chess. If a wrong move
is made, it can neither be ignored nor be recovered. The thing to do is to make
the best use of current situation and proceed. This is an example of an
irrecoverable solution steps.
Ignorable problems Ex:- theorem proving
In which
solution steps can be ignored.
Recoverable problems Ex:- 8 puzzle
In which
solution steps can be undone
Irrecoverable problems Ex:- Chess
In which
solution steps can’t be undone
A knowledge of these will help in determining the
control structure.
3.. Is the Universal Predictable?
Problems can be classified into those with certain
outcome (eight puzzle and water jug problems) and those with uncertain outcome
( playing cards) . in certain – outcome problems, planning could be done to
generate a sequence of operators that guarantees to a lead to a solution.
Planning helps to avoid unwanted solution steps. For uncertain out come
problems, planning can at best generate a sequence of operators that has a good
probability of leading to a solution. The uncertain outcome problems do not guarantee
a solution and it is often very expensive since the number of solution and it
is often very expensive since the number of solution paths to be explored
increases exponentially with the number of points at which the outcome can not
be predicted. Thus one of the hardest types of problems to solve is the
irrecoverable, uncertain – outcome problems ( Ex:-Playing cards).
4. Is good solution absolute or relative ?
(Is the solution a state or a path ?)
There are two categories of problems. In one, like the
water jug and 8 puzzle problems, we are satisfied with the solution, unmindful
of the solution path taken, whereas in the other category not just any solution
is acceptable. We want the best, like that of traveling sales man problem,
where it is the shortest path. In any – path problems, by heuristic methods we
obtain a solution and we do not explore alternatives. For the best-path
problems all possible paths are explored using an exhaustive search until the
best path is obtained.
5. The knowledge base consistent ?
In some problems the knowledge base is consistent
and in some it is not. For example consider the case when a Boolean expression
is evaluated. The knowledge base now contains theorems and laws of Boolean
Algebra which are always true. On the contrary consider a knowledge base that
contains facts about production and cost. These keep varying with time. Hence
many reasoning schemes that work well in consistent domains are not appropriate
in inconsistent domains.
Ex.Boolean expression evaluation.
6. What is the role of Knowledge?
Though one could have unlimited computing power,
the size of the knowledge base available for solving the problem does matter in
arriving at a good solution. Take for example the game of playing chess, just
the rues for determining legal moves and some simple control mechanism is
sufficient to arrive at a solution. But additional knowledge about good
strategy and tactics could help to constrain the search and speed up the
execution of the program. The solution would then be realistic.
Consider the case of predicting the political
trend. This would require an enormous amount of knowledge even to be able to
recognize a solution , leave alone the best.
Ex:- 1. Playing chess 2. News paper understanding
7. Does the task requires interaction with the
person.
The problems can again be categorized under two
heads.
Solitary in which the computer will be given a
problem description and will produce an answer, with no intermediate
communication and with he demand for an explanation of the reasoning process.
Simple theorem proving falls under this category . given the basic rules and
laws, the theorem could be proved, if one exists.
Ex:- theorem proving (give basic rules & laws
to computer)
Conversational, in which there will be intermediate
communication between a person and the computer, wither to provide additional
assistance to the computer or to provide additional informed information to the
user, or both problems such as medical diagnosis fall under this category, where
people will be unwilling to accept the verdict of the program, if they can not
follow its reasoning.
Ex:- Problems such as medical diagnosis.
8. Problem Classification
Actual problems are examined from the point of view
, the task here is examine an input and decide which of a set of known classes.
Ex:- Problems such as medical diagnosis ,
engineering design.
FORMALIZING GRAPH SEARCHING
A
directed graph consists of
a set N of nodes and
a set A of ordered pairs of nodes called arcs.
In this definition,
a node can be anything. All this definition does is constrain arcs to be
ordered pairs of nodes. There can be infinitely many nodes and arcs. We do not
assume that the graph is represented explicitly; we require only a procedure
that can generate nodes and arcs as needed.
The arc n1,n2 is an outgoing
arc from n1 and an incoming arc to n2.
A node n2 is a neighbor of n1
if there is an arc from n1
to n2; that is, if n1,n2 ∈A. Note that being a neighbor does
not imply symmetry; just because n2
is a neighbor of n1 does
not mean that n1 is
necessarily a neighbor of n2.
Arcs may be labeled, for example,
with the action that will take the agent from one state to another.
A path from node s to node g is a sequence
of nodes n0, n1,...,
nk such that s=n0,
g=nk, and ni-1,ni ∈A; that is, there is an arc from ni-1 to ni for each i.
Sometimes it is useful to view a path as the
sequence of arcs, no,n 1 , n1,n2 ,...,
n k-1,nk ,
or a sequence of labels of these arcs.
A cycle is a nonempty path such that the
end node is the same as the start node - that is, a cycle is a path n0, n 1,..., nk such that n0=nk and k≠0. A directed graph without any
cycles is called a directed acyclic
graph (DAG). This should
probably be an acyclic directed graph,
because it is a directed graph that
happens to be acyclic, not an acyclic graph that happens to be directed, but
DAG sounds better than ADG!
A tree is a DAG where there is one node
with no incoming arcs and every other node has exactly one incoming arc. The
node with no incoming arcs is called the root
of the tree and nodes with no outgoing arcs are called leaves.
To encode
problems as graphs, one set of nodes is referred to as the start nodes and another set is called the goal nodes. A solution
is a path from a start node to a goal node.
Sometimes
there is a cost - a positive number
- associated with arcs. We write the cost of arc ni,nj as
cost( ni,nj ). The costs of arcs induces a cost of
paths.
Given a
path p = n0, n1,...,
nk , the cost of path p
is the sum of the costs of the arcs in the path:
cost(p) = cost( n0,n1 ) +
...+ cost( nk-1,nk )
An optimal solution is one of the
least-cost solutions; that is, it is a path p
from a start node to a goal node such that there is no path p' from a start node to a goal node
where cost(p')<cost(p).
Related Topics