Chapter: Civil : Structural dynamics of earthquake engineering
Earthquake response spectra
Earthquake
response spectra
Abstract: In this chapter, earthquake
excitation problems are treated as base excitation problems. In many
engineering applications, one requires maximum absolute quantities experienced
by the structure during the earthquake of interest. In that respect, the
response spectrum method is ideally suited to designing structures against earthquake
motion. It is shown how the tripartite plot is useful for reading all the
spectral quantities for a given period. The construction of a NewmarkÔÇôHall
design spectrum is illustrated and the distinction is made between design and
response spectra. In all the codes, site-specific response spectra are
recommended. Finally inelastic design spectra are also discussed.
Key words: accelerograph, response spectrum,
spectral quantity, pseudo spectral quantity, ductility, time history.
Introduction
The earthquake response problem is essentially a base
excitation problem similar to the one discussed in the earlier chapter for
single-degree-of-freedom (SDOF) systems. The equation of motion is written as
Thus for any arbitrary acceleration of the supports the
relative displacement of the mass can be computed using the Duhamel integral
as

From Eq. 17.2 it is seen that the
relative response of the structure is characterized by its natural frequency,
damping factor and the nature of base excitation.
Generally we use undamped natural frequency instead of damped
frequency and the negative sign is ignored (the sense of response has no
significance in earthquake analysis)
v(t) = R(t)
is called the earthquake response integral. The relative displacement
is important since it is required to calculate base shear.
It is noticed that base shear represented in Eq. 17.5 is
equivalent to restoring force Fs(t). The exact
relative velocity is given by
The absolute total acceleration of the mass is obtained by
adding relative acceleration with ground acceleration as
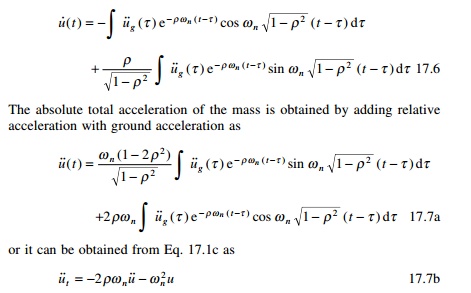
The total acceleration has many important applications. It can
most easily be measured experimentally during a strong earthquake. When an accelerograph
is located in a structure, it records in close approximation the total
acceleration at that point. From this we can calculate inertia force

Equations 17.2, 17.6 and 17.7 represent the earthquake time
history response for an SDOF system. Once we know base shear V (effective
earthquake force), we can design a system.
Earthquake response spectra
It has been seen from earlier chapters that the evaluation of dynamic
response (displacement, velocity and acceleration) at every instant of time
during an earthquake requires significant computational effort even for
relatively simple structural systems. However, for many engineering
applications we require maximum absolute quantities experienced by the structure
during the earthquake. These are commonly referred to as spectral displacement Sd,
spectral velocity Sv and spectral acceleration Sa,
given by

are the maximum absolute values of relative displacement, relative velocity and
total acceleration determined from Eq. 17.2, 17.6 and 17.7. However, these
quantities are generally determined from numerical integration techniques.
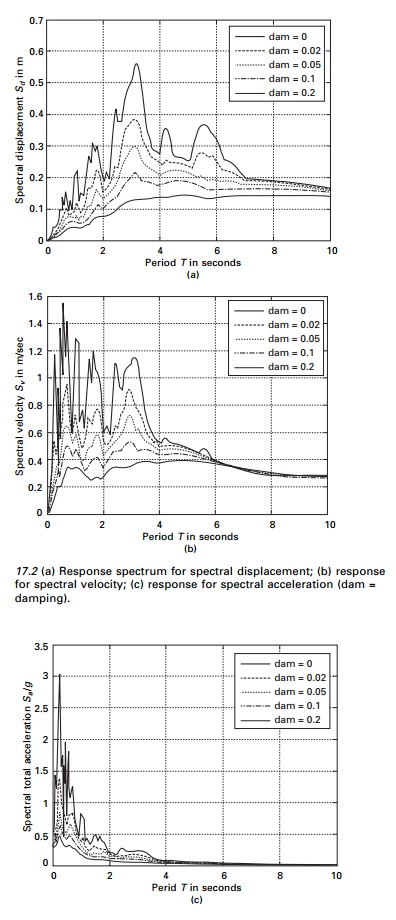
Plots of Sd, Sv, Sa versus undamped natural period of vibration for various
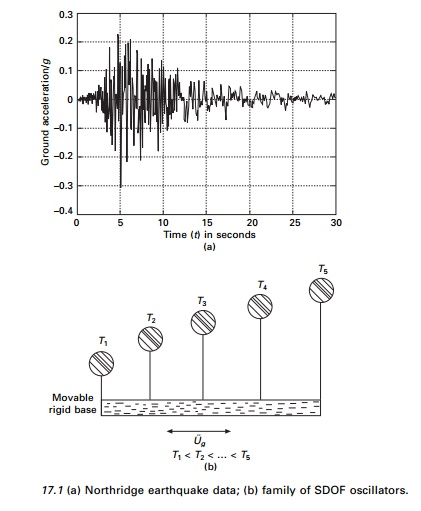
damping ratios are called earthquake response spectra. We can construct an
earthquake response spectrum, say, for Northridge earthquake (see Fig 17.1a) by
considering a series of oscillators (inverted pendulums) as shown in Fig. 17.1b
with varying periods of vibration attached with movable base. The base is
subjected to same ground motion as that of Northridge earthquake. The maximum
response for each pendulum (Sd, Sv, Sa) is plotted against the natural period
for a particular value of damping. Such curves are the response spectra and are
very useful for design. Figure 17.2 shows response spectra for relative
displacement, relative velocity and total acceleration for the Northridge
earthquake. These quantities are
generally determined by numerical evaluation using any of the numerical
techniques developed in Previous Pages. Plots of Sd, Sv and Sa versus
undamped natural period of vibration or natural frequency for various
damping factors make up the earthquake response spectrum. The MATLAB program
for drawing the spectra in Fig. 17.2 using WilsonÔÇÖs recurrence formulae is
shown below.
Program 17.1: MATLAB program
for drawing spectra for any specified earthquake
%********************************************************** %
WILSONÔÇÖS RECURRENCE FORMULA TO DRAW SPECTRA FOR ANY EARTHQUAKE MOTION %**********************************************************
clc;close
all;
%give initial displacement and initial velocity u(1)=0;
v(1)=0;
%tt=50 sec n=2500 for nridge %tt=30 n=1500 for elcentro ns
tt=50.0;
n=2500;
n1=n+1;
dt=tt/n;
mass=1;
%**********************************************************
% EARTHQUAKE
DATA FILE FOR NORTH-RIDGE EQ IS READ FROM EXCEL DATA FILE
% DATA FILE
CONSISTS OF TIME AND THE CORRESPONDING A/G VALUES
%DATA FILE
CHOPRA CONSISTS OF ELCENTRO NS DATA
EQDATA CONTAINS NORTHRIDGE DATA
%**********************************************************
de=xlsread(ÔÇśeqdataÔÇÖ);
%de=xlsread(ÔÇśchopraÔÇÖ) for i=1:n1;
ug(i)=de(i,2); ug(i)=-ug(i)*9.81; p(i)=ug(i)*mass;
end;
%define damping ratios for which response
is required rho=[0 0.02 0.05 .1 0.2];
for jj=1:5 r=rho(jj);
mass=1; for ii=1:200
tn=0.05*ii;
wn=2.0*pi/tn;
ss(ii)=tn;
k=mass*wn^2;
c=2.0*r*sqrt(k*mass);
wd=wn*sqrt(1-r^2);
a=exp(-r*wn*dt)*(r*sin(wd*dt)/sqrt(1-r^2)+cos(wd*dt));
b=exp(-r*wn*dt)*(sin(wd*dt))/wd;
c2=((1-2*r^2)/(wd*dt)-r/sqrt(1-r^2))*sin(wd*dt)-(1+2*r/(wn*dt))*cos(wd*dt);
c=(1/k)*(2*r/(wn*dt)+exp(-r*wn*dt)*(c2));
d 2 = e x p ( - r * w n * d t ) *
( ( 2 . 0 * r ^ 2 - 1 ) / ( w d * d t ) * s i n ( w d * d t ) + 2 . 0 * r /
(wn*dt)*cos(wd*dt));
d=(1/k)*(1-2.0*r/(wn*dt)+d2);
ad=-exp(-r*wn*dt)*wn*sin(wd*dt)/(sqrt(1-r^2));
bd=exp(-r*wn*dt)*(cos(wd*dt)-r*sin(wd*dt)/sqrt(1-r^2));
c 1 = e x p ( - r * w n * d t ) *
( ( w n / s q r t ( 1 - r ^ 2 ) + r / ( d t * s q r t ( 1 - r^2)))*sin(wd*dt)+cos(wd*dt)/dt);
cd=(1/k)*(-1/dt+c1);
d1=exp(-r*wn*dt)*(r*sin(wd*dt)/sqrt(1-r^2)+cos(wd*dt)); dd=(1/(k*dt))*(1-d1);
for m=2:n1 u(m)=a*u(m-1)+b*v(m-1)+c*p(m-1)+d*p(m);
v(m)=ad*u(m-1)+bd*v(m-1)+cd*p(m-1)+dd*p(m); ta(m)=(-c*v(m)-k*u(m))/mass;
end dmf(ii,jj)=max(abs(u));
vmf(ii,jj)=max(abs(v)); amf(ii,jj)=max(abs(ta)); end
end
for m=1:n1 s(m)=(m-1)*dt;
end figure(1);
plot(s,ug/9.81,ÔÇśKÔÇÖ);
xlabel(ÔÇś time (t) in secondsÔÇÖ);
ylabel(ÔÇś ground acceleration/gÔÇÖ); title(ÔÇś North Ridge EQ dataÔÇÖ); figure(2);
for ii=1:5 plot(ss,dmf(:,ii),ÔÇśKÔÇÖ); hold on
end
xlabel(ÔÇś
period T in secondsÔÇÖ);
ylabel(ÔÇś
Spectral displacement Sd in mÔÇÖ);
title(ÔÇś
Response spectrum for Sd North Ridge EQ)ÔÇÖ);
legend(ÔÇś dam=0ÔÇÖ,ÔÇśdam=0.02ÔÇÖ,ÔÇśdam=0.05ÔÇÖ, ÔÇśdam=0.1ÔÇÖ,ÔÇśdam=0.2ÔÇÖ) figure(3);
for ii=1:5 plot(ss,vmf(:,ii),ÔÇśKÔÇÖ); hold on
end
xlabel(ÔÇś period T in secondsÔÇÖ);
ylabel(ÔÇś
Spectral velocity Sv in m/secÔÇÖ);
title(ÔÇś
Response spectrum for Sv (North Ridge EQ)ÔÇÖ);
legend(ÔÇś dam=0ÔÇÖ,ÔÇśdam=0.02ÔÇÖ,ÔÇśdam=0.05ÔÇÖ, ÔÇśdam=0.1ÔÇÖ,ÔÇśdam=0.2ÔÇÖ)
figure(4);
for ii=1:5 plot(ss,amf(:,ii)/9.81,ÔÇśKÔÇÖ); hold on
end
xlabel(ÔÇś
period T in secondsÔÇÖ);
ylabel(ÔÇś
Spectral total acceleration Sa/gÔÇÖ);
title(ÔÇś Response spectrum for Sa (total) (North Ridge EQ)ÔÇÖ);
legend(ÔÇś dam=0ÔÇÖ,ÔÇśdam=0.02ÔÇÖ,ÔÇśdam=0.05ÔÇÖ, ÔÇśdam=0.1ÔÇÖ,ÔÇśdam=0.2ÔÇÖ)
fid=fopen(ÔÇśsv.outÔÇÖ,ÔÇśwÔÇÖ)
for
jj=1:200
fprintf(fid,ÔÇś
%6.3f %6.2f %6.2f %6.2f %6.2f %6.2f\nÔÇÖ...
,ss(jj),vmf(jj,1),vmf(jj,2),vmf(jj,3),vmf(jj,4),vmf(jj,5));
end
fclose(fid)
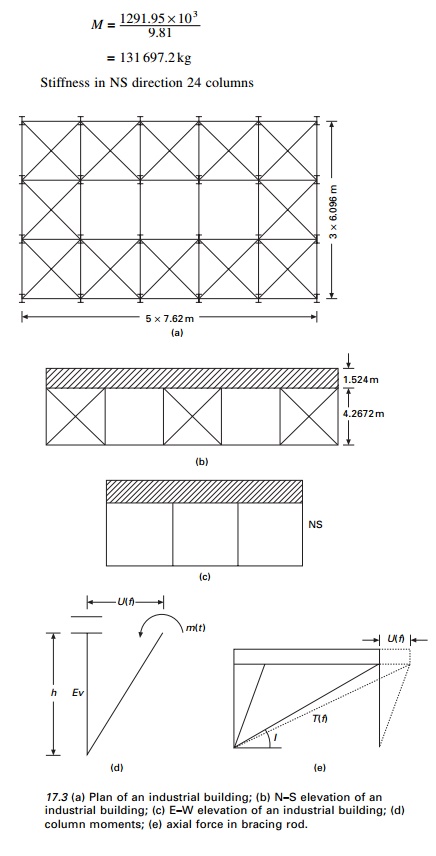
Example 17.1
An industrial building is shown
in Fig. 17.3. Idealize the structure as an SDOF system. Assume the structure
acts as a braced frame in the EW direction (having a total of six braced bays)
and unbraced shear frame (with column base) pinned in the NS
direction. Assume all columns bend about the major axis to the NS direction.
The vertical cross-bracings in
the EW direction are 25.4 mm diameter steel rods. The dead weight of the
structure is 1291.95 kN which is concentrated at the base of the roof trusses.
Moment of inertia of columns 8.6992 ├Ś 107
mm4. The height of the building may be assumed as 4.2672 m and the
damping is 5% of critical damping. Consider Northridge earthquake.
(a) Determine
the natural period for the NS and EW directions.
(b) Conduct a
time history analysis of the structure in both directions. Use the NS component
of the 17 January, 1994 Northridge earthquake shown in Fig. 17.1a as input.
Solution
(a) Natural
period. Mass of the structure
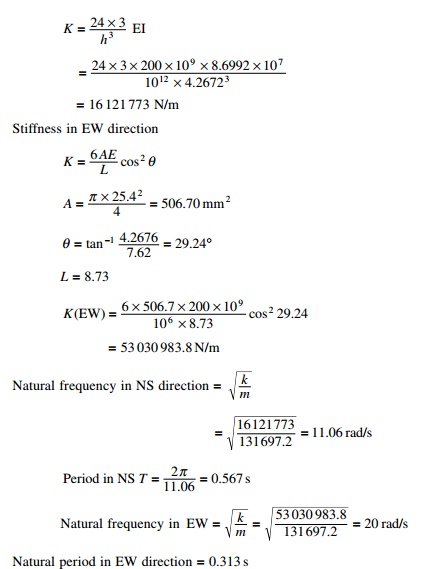
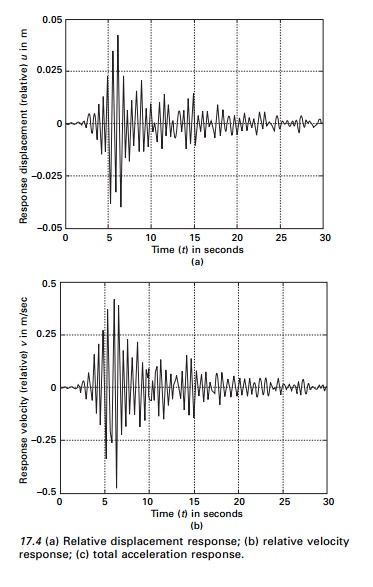
(b) Time history response.
The parameters in the time history response are relative displacement, u(t),
relative velocity is u˙(t ), absolute total acceleration
is u˙˙t (t ). Also of interest of base
shear V(t), the bending moment in columns M(t) and
axial force in the steel rods T(t).
The equation of moment in NS direction
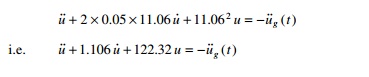
Equation
of moment in EW direction
u╦Ö╦Ö + 2 ├Ś 0.05 ├Ś 20 u╦Ö + 20 2 u = Ôłĺu╦Ö╦Ög (t )
i.e. u˙˙ + 2 u˙
+ 400 u = Ôłĺu╦Ö╦Ög (t
)
The value can be obtained for the
Northridge earthquake by integrating above two expressions.
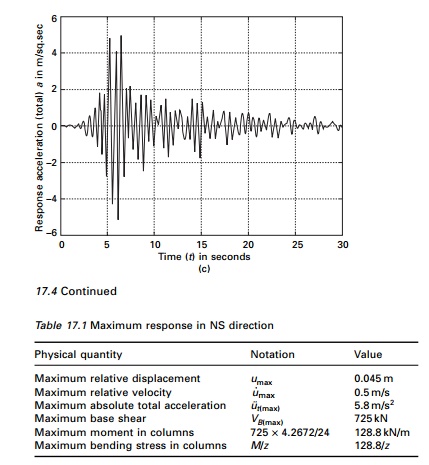
As an example. The response displacement, velocity and total
acceleration are shown in Fig. 17.4 and Table 17.1 gives maximum response in NS
direction.
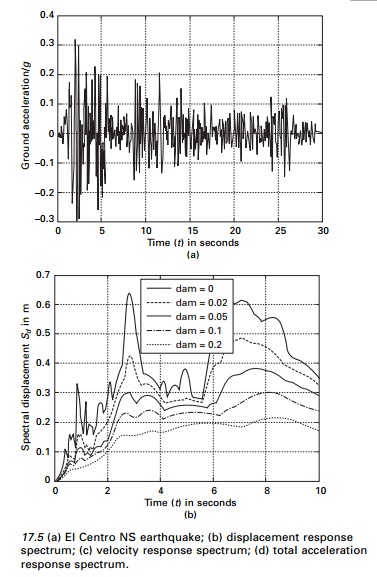
Example 17.2
Construct response spectra for
the NS component of E1 Centro earthquake (see Fig. 17.5a). Consider damping
factors 0, 0.02, 0.05, 0.1 and 0.2.
Solution
The spectral displacement Sd, spectral
velocity Sv and spectral acceleration Sa are
determined from Eq. 17.9a, b and c respectively. The responses are evaluated
numerically by direct integration of the equation

for ¤ü = 0.02, 0.05 and 0.1 from which
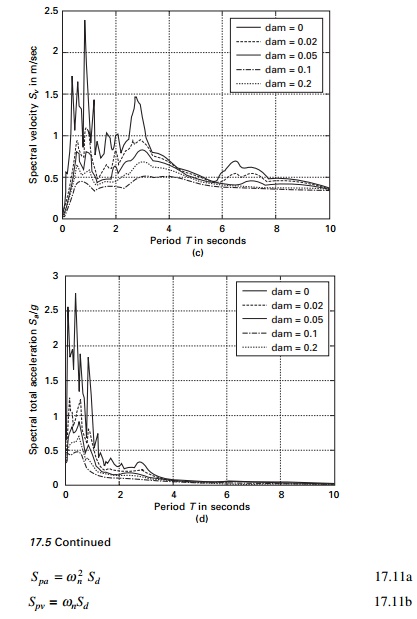
maximum responses are determined. The response spectral Sd, Sv
and Sa are presented in Fig. 17.5b, c and d due to the El
Centro earthquake (NS) shown in Fig. 17.5a.
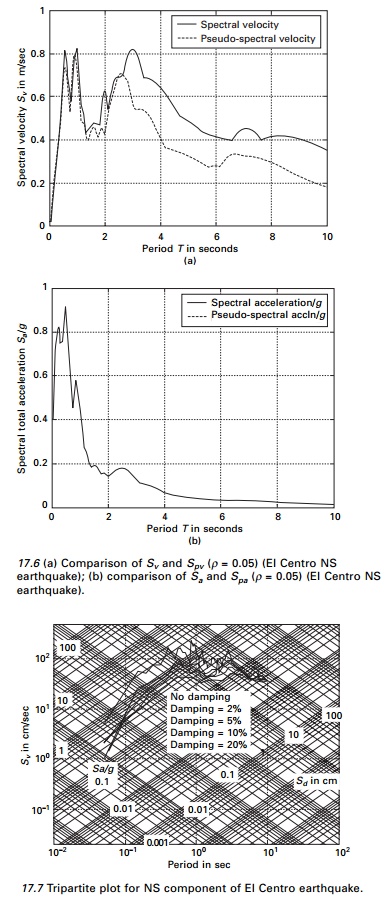
Let us define pseudo-spectral velocity and pseudo spectral
acceleration as Spv, Spa as Spa
= ¤ë n2 Sd
=
¤ën Sv; Spv
= ¤ën Sd. Usually
the parameters Spv and Spa have certain
characteristics that are of practical interest. The pseudo-spectral velocity Spv
is close to spectral velocity Sv for short period structure.
The comparison between Spv and Sv for the
NS component of the El Centro earthquake for ¤é = 0.05 is illustrated in Fig. 17.6. For zero damping, the
pseudo-spectral acceleration Spa is identical to spectral
acceleration. However, for damping other than zero, the two are slightly
different. Nevertheless for damping levels encountered in most engineering
applications, the two can be considered practically equal.
Hence the spectral relationship significantly expedites the
construction of earthquake response spectra. Evaluation of spectra displacement
sd after numerical integration to obtain time history
response, the corresponding pseudo spectral velocity Spv and
pseudo spectral acceleration Spa can readily be established
and we see later how sd, spv and Spa
can then all be plotted on a four-way logarithmic paper.
Then for a given frequency or for
a given period all the spectral quantities can be read simultaneously for the
same tripartite plot. A tripartite plot of sd,
spvr, Spa for
the NS component of the El Centro earthquake for various damping factors
is presented in Fig. 17.7.
Program
17.2: MATLAB program to draw tripartite plot
%**********************************************************
% to draw
elastic design spectra from the earthquake data
% read the
response spectrum values in this program
%**********************************************************
for
k=.00001:.00001:.0001
x=0.01:1:100
t=log(2*pi*k)-log(x)
y=exp(t)
loglog(x,y,ÔÇśkÔÇÖ),grid
on
hold on
t=log(k*9.81/(2*pi))+log(x)
y=exp(t)
loglog(x,y,ÔÇśkÔÇÖ)
hold on
end
for
k=.0001:.0001:.001
x=0.01:1:100
t=log(2*pi*k)-log(x)
y=exp(t)
loglog(x,y,ÔÇśkÔÇÖ),grid
on
hold on
t=log(k*9.81/(2*pi))+log(x)
y=exp(t)
loglog(x,y,ÔÇśkÔÇÖ) hold on
end
for k=.001:.001:.01 x=0.01:1:100
t=log(2*pi*k)-log(x) y=exp(t) loglog(x,y,ÔÇśkÔÇÖ),grid on hold on
t=log(k*9.81/(2*pi))+log(x)
y=exp(t)
loglog(x,y,ÔÇśkÔÇÖ) hold on
end
xlabel(ÔÇś period in secsÔÇÖ)
ylabel(ÔÇś spectral velocity sv in
cm/secÔÇÖ) for k=.01:.01:.1
x=0.01:1:100 t=log(2*pi*k)-log(x)
y=exp(t) loglog(x,y,ÔÇśkÔÇÖ),grid on hold on
t=log(k*9.81/(2*pi))+log(x)
y=exp(t)
loglog(x,y,ÔÇśkÔÇÖ) hold on
end
for k=.1:.1:1 x=0.01:1:100
t=log(2*pi*k)-log(x) y=exp(t) loglog(x,y,ÔÇśkÔÇÖ),grid on hold on
t=log(k*9.81/(2*pi))+log(x)
y=exp(t)
loglog(x,y,ÔÇśkÔÇÖ) hold on
end
for k=1:1:10 x=0.01:1:100 t=log(2*pi*k)-log(x) y=exp(t)
loglog(x,y,ÔÇśkÔÇÖ),grid on hold on
t=log(k*9.81/(2*pi))+log(x)
y=exp(t)
loglog(x,y,ÔÇśkÔÇÖ) hold on
end
for k=10:10:100 x=0.01:1:100
t=log(2*pi*k)-log(x) y=exp(t) loglog(x,y,ÔÇśkÔÇÖ),grid on hold on
t=log(k*9.81/(2*pi))+log(x)
y=exp(t)
loglog(x,y,ÔÇśkÔÇÖ) hold on
end
for k=100:100:1000 x=0.01:1:100
t=log(2*pi*k)-log(x) y=exp(t) loglog(x,y,ÔÇśkÔÇÖ),grid on hold on
t=log(k*9.81/(2*pi))+log(x)
y=exp(t)
loglog(x,y,ÔÇśkÔÇÖ) hold on
end
for k=1000:1000:10000
x=0.01:1:100 t=log(2*pi*k)-log(x) y=exp(t) loglog(x,y,ÔÇśkÔÇÖ),grid on hold on
t=log(k*9.81/(2*pi))+log(x)
y=exp(t)
loglog(x,y,ÔÇśkÔÇÖ) end
axis([0.01 100 0.02 500]) %
d=xlsread(ÔÇśsvdataÔÇÖ); sv=ÔÇśsv.outÔÇÖ
d=load(sv)
plot(d(:,1),100*d(:,2),ÔÇśkÔÇÖ)
plot(d(:,1),100*d(:,3),ÔÇśkÔÇÖ)
plot(d(:,1),100*d(:,4),ÔÇśkÔÇÖ)
plot(d(:,1),100*d(:,5),ÔÇśkÔÇÖ)
plot(d(:,1),100*d(:,6),ÔÇśkÔÇÖ)
text(0.2,0.02,ÔÇś0.001ÔÇÖ);
text(0.6,0.1,ÔÇś0.01ÔÇÖ);
text(2,0.3,ÔÇś0.1ÔÇÖ);
text(7,1,ÔÇś1ÔÇÖ);
text(20,3,ÔÇś10ÔÇÖ);
text(80,10,ÔÇś100ÔÇÖ) text(20,1,ÔÇśsd
in cmÔÇÖ) xlabel(ÔÇś period in secÔÇÖ) ylabel(ÔÇś sv in cm/secÔÇÖ) text(0.01,200,ÔÇś100ÔÇÖ)
text(0.01,20,ÔÇś10ÔÇÖ) text(0.01,2,ÔÇś1ÔÇÖ) text(0.02,0.4,ÔÇś0.1ÔÇÖ) text(0.07,0.1,ÔÇś0.01ÔÇÖ)
text(.02,0.8,ÔÇÖsa/gÔÇÖ) gtext(ÔÇś no dampingÔÇÖ) gtext(ÔÇś damping=2%ÔÇÖ) gtext(ÔÇś
damping=5%ÔÇÖ) gtext(ÔÇś damping=10%ÔÇÖ) gtext(ÔÇś damping=20%ÔÇÖ)
Related Topics