Chapter: Artificial Intelligence
Uniformed or Blind search
Uniformed or Blind search
a.
Breadth
First Search (BFS)
b.
Depth
First Search (DFS)
c.
Depth
Limited Search (DLS)
d.
Depth
First Iterative Deepening Search (DFIDS)
e.
Bi-Directional
Search (BDS)
Breadth First Search (BFS): BFS
expands the leaf node with the lowest path cost so far, and keeps going until a goal node is generated. If the path
cost simply equals the number of links, we can implement this as a simple queue
(ŌĆ£first in, first outŌĆØ).
This is
guaranteed to find an optimal path to a goal state. It is memory intensive if
the state space is large. If the typical branching factor is b, and the depth
of the shallowest goal state is d ŌĆō the space complexity is O(bd),
and the time complexity is O(bd).
BFS is an
easy search technique to understand. The algorithm is presented below.
breadth_first_search ()
{
store
initial state in queue Q
set state
in the front of the Q as current state ;
while
(goal state is reached OR Q is empty)
{
apply
rule to generate a new state from the current
state ;
if (new
state is goal state) quit ;
else if
(all states generated from current states are
exhausted)
{
delete
the current state from the Q ;
set front
element of Q as the current state ;
}
else
continue ;
}
}
The
algorithm is illustrated using the bridge components configuration problem. The
initial state is PDFG, which is not a goal state; and hence set it as the
current state. Generate another state DPFG (by swapping 1st and 2nd
position values) and add it to the list. That is not a goal state, hence;
generate next successor state, which is FDPG (by swapping 1st and 3rd position
values). This is also not a goal state; hence add it to the list and generate
the next successor state GDFP.
Only
three states can be generated from the initial state. Now the queue Q will have
three elements in it, viz., DPFG, FDPG and GDFP. Now take DPFG (first state in
the list) as the current state and continue the process, until all the states
generated from this are evaluated. Continue this process, until the goal state
DGPF is reached.
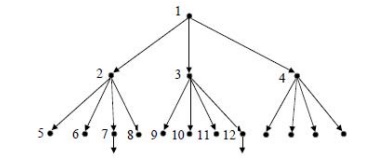
The 14th
evaluation gives the goal state. It may be noted that, all the states at one
level in the tree are evaluated before the states in the next level are taken
up; i.e., the evaluations are carried out breadth-wise. Hence, the search
strategy is called breadth-first search.
Depth First Search (DFS): DFS
expands the leaf node with the highest path cost so far, and keeps going until a goal node is generated. If the path
cost simply equals the number of links, we can implement this as a simple stack
(ŌĆ£last in, first outŌĆØ).
This is
not guaranteed to find any path to a goal state. It is memory efficient even if
the state space is large. If the typical branching factor is b, and the maximum
depth of the tree is m ŌĆō the space complexity is O(bm), and the time complexity
is O(bm).
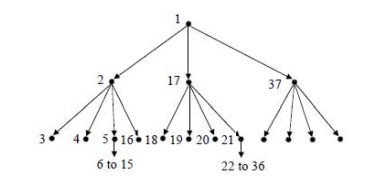
In DFS,
instead of generating all the states below the current level, only the first
state below the current level is generated and evaluated recursively. The
search continues till a further successor cannot be generated.
Then it
goes back to the parent and explores the next successor. The algorithm is given
below.
depth_first_search
()
{
set
initial state to current state ;
if
(initial state is current state) quit ;
else
{
if (a
successor for current state exists)
{
generate
a successor of the current state and
set it as
current state ;
}
else
return ;
depth_first_search
(current_state) ;
if (goal
state is achieved) return ;
else
continue ;
}
}
Since DFS
stores only the states in the current path, it uses much less memory during the
search compared to BFS.
The
probability of arriving at goal state with a fewer number of evaluations is higher
with DFS compared to BFS. This is because, in BFS, all the states in a level
have to be evaluated before states in the lower level are considered. DFS is
very efficient when more acceptable solutions exist, so that the search can be
terminated once the first acceptable solution is obtained.
BFS is
advantageous in cases where the tree is very deep.
An ideal
search mechanism is to combine the advantages of BFS and DFS.
Depth Limited Search (DLS): DLS is a
variation of DFS. If we put a limit l on how deep a depth first search can go, we can guarantee that the search
will terminate (either in success or failure).
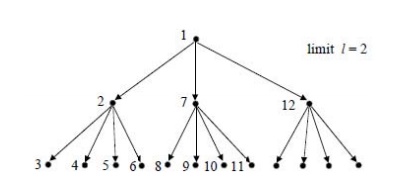
If there
is at least one goal state at a depth less than l, this algorithm is guaranteed
to find a goal state, but it is not guaranteed to find an optimal path. The
space complexity is O(bl), and the time complexity is O(bl).
Depth First Iterative Deepening Search (DFIDS): DFIDS is
a variation of DLS. If the lowest
depth of a goal state is not known, we can always find the best limit l for DLS
by trying all possible depths l = 0, 1, 2, 3, ŌĆ” in turn, and stopping once we
have achieved a goal state.
This
appears wasteful because all the DLS for l less than the goal level are
useless, and many states are expanded many times. However, in practice, most of
the time is spent at the deepest part of the search tree, so the algorithm
actually combines the benefits of DFS and BFS.
Because
all the nodes are expanded at each level, the algorithm is complete and optimal
like BFS, but has the modest memory requirements of DFS. Exercise: if we had
plenty of memory, could/should we avoid expanding the top level states many
times?
The space
complexity is O(bd) as in DLS with l = d, which is better than BFS. The time
complexity is O(bd) as in BFS, which is better than DFS.
Bi-Directional Search (BDS): The idea
behind bi-directional search is to search
simultaneously both forward from the initial state and backwards from the
goal state, and stop when the two BFS searches meet in the middle.
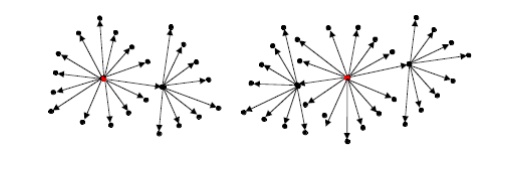
This is
not always going to be possible, but is likely to be feasible if the state
transitions are reversible. The algorithm is complete and optimal, and since
the two search depths are ~d/2, it has space complexity O(bd/2), and
time complexity O(bd/2). However, if there is more than one possible
goal state, this must be factored into the complexity.
Repeated States: In the above discussion we have
ignored an important complication that
often arises in search processes ŌĆō the possibility that we will waste time by
expanding states that have already been expanded before somewhere else on the
search tree.
For some
problems this possibility can never arise, because each state can only be
reached in one way.
For many
problems, however, repeated states are unavoidable. This will include all
problems where the transitions are reversible, e.g.

The
search trees for these problems are infinite, but if we can prune out the
repeated states, we can cut the search tree down to a finite size, We effectively
only generate a portion of the search tree that matches the state space graph.
Avoiding Repeated States: There are
three principal approaches for dealing with
repeated states:
├ś Never return to the state you have just come from
The node
expansion function must be prevented from generating any node successor that is
the same state as the nodeŌĆÖs parent.
├ś Never create search paths with cycles in them
The node
expansion function must be prevented from generating
any node
successor that is the same state as any of the nodeŌĆÖs ancestors.
├ś Never generate states that have already been generated before
This
requires that every state ever generated is remembered, potentially resulting
in space complexity of O(bd).
Comparing the Uninformed Search Algorithms: We can
now summarize the properties of our
five uninformed search strategies:
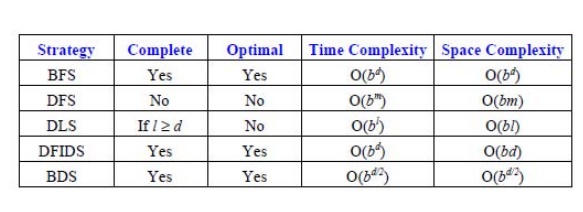
Simple
BFS and BDS are complete and optimal but expensive with respect to space and
time.
DFS
requires much less memory if the maximum tree depth is limited, but has no
guarantee of finding any solution, let alone an optimal one. DLS offers an
improvement over DFS if we have some idea how deep the goal is.
The best overall is DFID which is complete, optimal and has low memory requirements, but still exponential time.
Related Topics