Chapter: Civil : Structural dynamics of earthquake engineering
Inelastic response spectra
Inelastic response spectra
While the foregoing discussion has been for elastic response
spectra, most structures are not expected or even designed to remain elastic
under strong ground motions. Rather, structures are expected to enter the
inelastic region, and the extent to which they behave inelastically can be
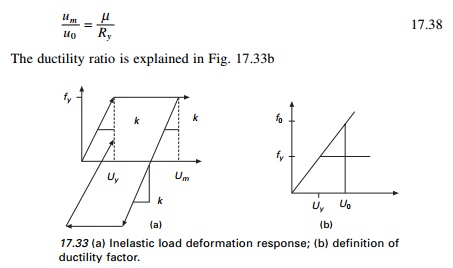
defined by the ductility factor

assuming the simplest force
deformation relationship is chosen. Figure 17.33a shows the elastic perfectly
plastic (elasto-plastic) force deformation relation, f s (u
, sign u˙). The elastic stiffness is K and the
post-yield stiffness is zero. The yield strength is fy
and the yield deflection is uy. During unloading the
algebraic sign of u˙ is negative and during reloading the
algebraic sign of u˙ is positive and hence the hysteretic system
occurs along a path parallel to the initial elastic branch without any
deterioration of stiffness and strength. Within the linear elastic range the
natural vibration period is Tn (Tn = 2ŽĆ/Žēn) and the
damping ratio is Žü.
1Ductility factor and yield strength reduction factor
The yield strength reduction factor Ry is
defined as

where f0 and u0 are the
minimum yield strength and yield deflection required for the structure to
remain elastic during ground motion.
ductility factor = um/uy --- ---- 17.37
The inelastic deformation ratio is defined as the ratio of
deflection of inelastic and the corresponding linear system related by ┬Ą and Ry.
2Equations of motion and controlled parameters
The governing equation of motion is
The same numerical procedures discussed in Chapter 7 can also
be applied here with the difference that the time instants must be detected
accurately enough when the system changes from elastic to yield branch.
For a given ground excitation u˙˙g (t ) , u(t) depends on three
system parameters Žēn(Tn = 2ŽĆ/Žēn), Žü, and uy and the ductility factor ┬Ą depends on ŽēnŽü and Ry
3Inelastic response shock spectrum
Peak deformation and ductility demand
The deformation response of an inelastic system is obtained
from its initial elastic vibration period Tn and damping
factor Žü and
force deflection relation and its corresponding linear system are also
obtained.

Inelastic response spectra can be
calculated in the time domain by direct integration, analogous to elastic
response spectra but with structural stiffness as a nonlinear function of
displacements K = K(u). If elastic plastic behaviour is
assumed, then elastic response spectra on the basis that at high periods Tn
> 33 s (fn < 0.03 Hz) displacements are the same and at
high frequencies and at low periods Tn < 1/33 s (fn
> 33 Hz) acceleration are equal and at intermediate periods (frequencies)
the absorbed energy is preserved.
An inelastic design spectrum is most commonly created directly
from the elastic design spectrum. Observe then the spectral velocity Sv,
spectral displacement Sd, converted to force-based design
values by dividing them by the ductility factor:

In the acceleration constant
region, the reduction factor Ry is attained by equating
elastic and inelastic strain energies. The resultant reduction factor is 2 ┬Ą RooT(ŌłÆ 1) . The inelastic design spectrum follows
elastic spectrum in the acceleration constant region where it is multiplied by ┬Ą / 2 ┬Ą RooT(ŌłÆ 1) . This quantification of relative
displacement maxima is usually referred to as ŌĆśequal displacementŌĆÖ when
incorporated with the description of the design process.
Several researchers have proposed equations of variation of Ry
with Tn, and ┬Ą. The
elastic spectrum equation for Ry goes back to the work of
Velestos and Newmark:

where the periods Ta,
Tb,ŌĆ”, Tf separating the spectral regions
are already defined. The basis of the well-known design spectra developed by
Newmark and Hall is plotted for several values of ┬Ą in logŌĆōlog format as shown in Fig. 17.34, where sloping
straight lines are included to provide transition among the three constant
segments. The construction of inelastic design spectrum is shown in Fig. 17.35.
The inelastic design spectrum for 5% damping 84%
u˙˙g = 1g
; u˙g = 122 cm/s, ug0 = 91.44 cm is
shown in logarithmic and normal scale in Figs 17.36 and 17.37 respectively.
Spectra such as those described
above provides the basis for safety evaluation of new and existing structures
which will be discussed in later chapters.
Related Topics