Chapter: Artificial Intelligence
Uncertainty - Artificial Intelligence
UNCERTAINTY
1. UNCERTAINTY
To act
rationally under uncertainty we must be able to evaluate how likely certain
things are. With FOL a fact F is only useful if it is known to be true or
false. But we need to be able to evaluate how likely it is that F is true. By
weighing likelihoods of events (probabilities) we can develop mechanisms for
acting rationally under uncertainty.
Dental Diagnosis example.
In FOL we
might formulate
P.
symptom(P,toothache)ŌåÆ disease(p,cavity) disease(p,gumDisease)
disease(p,foodStuck)
When do
we stop?
Cannot
list all possible causes.
We also
want to rank the possibilities. We donŌĆÖt want to start drilling for a cavity
before checking for more likely causes first.
Axioms Of Probability
Given a
set U (universe), a probability function is a function defined over the subsets
of U that maps each subset to the real numbers and that satisfies the Axioms of
Probability
1.Pr(U) = 1
2.Pr(A) [0,1]
3.Pr(A ŌłłB) = Pr(A) + Pr(B) ŌĆōPr(A Ōł®B)
Ōł¬
Note if A
Ōł®B = {} then Pr(A Ōł¬B) = Pr(A) + Pr(B)
2. REVIEW OF PROBABILTY
┬Ę
Natural
way to represent
uncertainty
┬Ę People have
intuitive notions about
probabilities
┬Ę
Many of these
are wrong or
inconsistent
┬Ę Most people donŌĆÖt get what probabilities mean
┬Ę
Understanding
Probabilities
┬Ę Initially, probabilities
are ŌĆ£relative frequenciesŌĆØ
┬Ę This works
well for dice
and coin flips
┬Ę
For
more complicated events,
this is problematic
┬Ę What is
the probability that
Obama will be
reelected?
┬Ę
This event
only happens once
┬Ę
We canŌĆÖt count frequencies
┬Ę
still
seems like a
meaningful question
┬Ę
In
general, all events
are unique
Probabilities and Beliefs
ŌĆó Suppose
I have flipped a coin and hidden the outcome
ŌĆó What is
P(Heads)?
ŌĆó Note
that this is a statement about a belief, not a statement about the world
ŌĆó The
world is in exactly one state (at the macro level) and it is in that state with
probability 1.
ŌĆó
Assigning truth values to probability statements is very tricky business
ŌĆó Must
reference speakers state of knowledge
Frequentism and Subjectivism
ŌĆó
Frequentists hold that probabilities must come from relative frequencies
ŌĆó This is
a purist viewpoint
ŌĆó This is
corrupted by the fact that relative frequencies are often unobtainable
ŌĆó Often requires
complicated and convoluted
ŌĆó
assumptions to come up with probabilities
ŌĆó
Subjectivists: probabilities are degrees of belief
o Taints
purity of probabilities
o Ofen
more practical
Types
are:
1
Unconditional or prior probabilities
2 Conditional
or posterior probabilities
3. PROBABILISTIC REASONING
┬Ę
Representing Knowledge in an Uncertain Domain
┬Ę
Belief network used to encode the meaningful
dependence between variables. o Nodes represent random variables
o
Arcs
represent direct influence
o Nodes have conditional
probability table that gives that var's probability given the different states of its
parents
o
Is a
Directed Acyclic Graph (or DAG)
The Semantics of Belief Networks
┬Ę
To construct net, think of as representing the
joint probability distribution.
┬Ę
To infer from net, think of as representing
conditional independence statements.
┬Ę
Calculate a member of the joint probability by
multiplying individual conditional probabilities:
o
P(X1=x1,
. . . Xn=xn) =
o
=
P(X1=x1|parents(X1)) * . . . * P(Xn=xn|parents(Xn))
┬Ę
Note: Only have to be given the immediate parents
of Xi, not all other nodes:
o
P(Xi|X(i-1),...X1)
= P(Xi|parents(Xi))
┬Ę
To incrementally construct a network:
1.
Decide on the variables
2.
Decide on an ordering of them
3.
Do until no variables are left:
a.
Pick a variable and make a node for it
b.
Set its parents to the minimal set of pre-existing
nodes
c.
Define its conditional probability
┬Ę
Often, the resulting conditional probability tables
are much smaller than the exponential size of the full joint
┬Ę
If don't order nodes by "root causes"
first, get larger conditional probability tables
┬Ę
Different tables may encode the same probabilities.
┬Ę
Some canonical distributions that appear in
conditional probability tables:
o deterministic logical
relationship (e.g. AND, OR) o deterministic numeric relationship (e.g. MIN)
o parameteric relationship (e.g.
weighted sum in neural net) o noisy logical relationship (e.g. noisy-OR,
noisy-MAX)
Direction-dependent separation or D-separation:
┬Ę
If all undirected paths between 2 nodes are
d-separated given evidence node(s) E, then the 2 nodes are independent given E.
┬Ę
Evidence node(s) E d-separate X and Y if for every
path between them E contains a node Z that:
o has an arrow in on the path
leading from X and an arrow out on the path leading to Y (or vice versa)
o
has
arrows out leading to both X and Y
o
does NOT
have arrows in from both X and Y (nor Z's children too)
Inference in Belief Networks
┬Ę
Want to compute posterior probabilities of query
variables given evidence variables.
┬Ę
Types of inference for belief networks:
o Diagnostic inference: symptoms to
causes o Causal
inference: causes to symptoms
o Intercausal
inference:
o Mixed
inference: mixes those above
Inference in Multiply Connected Belief Networks
┬Ę
Multiply connected graphs have 2 nodes connected by
more than one path
┬Ę
Techniques for handling:
o
Clustering: Group some of the intermediate nodes
into one meganode. Pro: Perhaps best way to get exact evaluation.
Con:
Conditional probability tables may exponentially increase in size.
o
Cutset conditioning: Obtain simplier polytrees by
instantiating variables as constants.
Con: May
obtain exponential number of simplier polytrees.
Pro: It
may be safe to ignore trees with lo probability (bounded cutset conditioning).
Stochastic
simulation: run thru the net with randomly choosen values for each node
(weighed by prior probabilities).
4. BAYESIAN NETWORK
BayesŌĆÖ
nets:
A
technique for describing complex joint distributions (models) using simple,
local distributions
(conditional
probabilities)
More
properly called graphical models
Local
interactions chain together to give global indirect interactions
A
Bayesian network is a graphical structure that allows us to represent and
reason about an uncertain domain. The nodes in a Bayesian network represent a
set of random variables,
X=X1;::Xi;:::Xn,
from the domain. A set of directed arcs(or links) connects pairs of nodes,
Xi!Xj, representing the direct dependencies between variables.
Assuming
discrete variables, the strength of the relationship between variables is
quantified by conditional probability distributions associated with each node.
The only constraint on the arcs allowed in a BN is that there must not be any
directed cycles: you cannot return to a node simply by following directed arcs.
Such
networks are called directed acyclic graphs, or simply dags. There are a number
of steps that a knowledge engineer must undertake when building a Bayesian
network. At this stage we will present these steps as a sequence; however it is
important to note that in the real-world the process is not so simple.
Nodes and values
First,
the knowledge engineer must identify the variables of interest. This involves
answering the question: what are the nodes to represent and what values can
they take, or what state can they be in? For now we will consider only nodes
that take discrete values. The values should be both mutually exclusive and
exhaustive , which means that the variable must take on exactly one of these
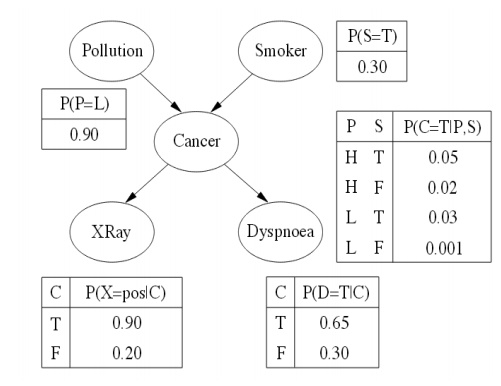
values at a time. Common types of discrete nodes include:
Boolean
nodes, which represent propositions, taking the binary values true (T) and
false (F). In a medical diagnosis domain, the node Cancer would represent the
proposition that a patient has cancer.
Ordered
values. For example, a node Pollution might represent a patientŌĆÖs pol-lution
exposure and take the values low, medium, high
Integral
values. For example, a node called Age might represent a patientŌĆÖs age and have
possible values from 1 to 120.
Even at this early stage, modeling choices are being made. For example, an alternative to representing a patientŌĆÖs exact age might be to clump patients into different age groups, such as baby, child, adolescent, young, middleaged, old. The trick is to choose values that represent the domain efficiently.
1 Representation of joint probability distribution
2 Conditional independence relation in
Bayesian network
5. INFERENCE IN BAYESIAN NETWORK
1
Tell
2
Ask
3
Kinds of inferences
4
Use of Bayesian network
┬Ę
In general, the problem of Bayes Net inference is
NP-hard (exponential in the size of the graph).
┬Ę
For singly-connected networks or polytrees in which
there are no undirected loops, there are linear time algorithms based on belief
propagation.
┬Ę
Each node sends local evidence messages to their
children and parents.
┬Ę
Each node updates belief in each of its possible
values based on incoming messages from it neighbors and propagates evidence on
to its neighbors.
┬Ę
There are approximations to inference for general
networks based on loopy belief propagation that iteratively refines
probabilities that converge to accurate limit.
TEMPORAL MODELS
1
Monitoring or filtering
2
Prediction
Bayes' Theorem
Many of
the methods used for dealing with uncertainty in expert systems are based on
Bayes' Theorem.
Notation:
P(A) Probability of event A
P(A B)
Probability of events A and B occurring together P(A | B) Conditional
probability of event A
given
that event B has occurred .nr/
If A and
B are independent, then P(A | B) = P(A). .co
Expert
systems usually deal with events that are not independent, e.g. a disease and
its symptoms are not independent.
Theorem
P (A B) =
P(A | B)* P(B) = P(B | A) * P(A) therefore P(A | B) = P(B | A) * P(A) / P(B)
Uses of Bayes' Theorem
In doing
an expert task, such as medical diagnosis, the goal is to determine
identifications (diseases) given observations (symptoms). Bayes' Theorem
provides such a relationship.
P(A | B)
= P(B | A) * P(A) / P(B)
Suppose:
A=Patient has measles, B =has a rash
Then:P(measles/rash)=P(rash/measles)
* P(measles) / P(rash)
The
desired diagnostic relationship on the left can be calculated based on the
known statistical quantities on the right.
Joint Probability Distribution
Given a
set of random variables X1 ... Xn, an atomic event is an assignment of a
particular value to each Xi. The joint probability distribution is a table that
assigns a probability to each atomic event. Any question of conditional
probability can be answered from the joint.
Toothache
¬ Toothache
Cavity 0.04 0.06
¬ Cavity
0.01 0.89
Problems:
The size
of the table is combinatoric: the product of the number of possibilities for
each random variable. The time to answer a question from the table will also be
combinatoric. Lack of evidence: we may not have statistics for some table
entries, even though those entries are not impossible.
Chain Rule
We can
compute probabilities using a chain rule as follows: P(A &and B &and C)
= P(A | B &and C) * P(B | C) * P(C)
If some
conditions C1 &and ... &and Cn are independent of other conditions U,
we will have:
P(A | C1
&and ... &and Cn &and U) = P(A | C1 &and ... &and Cn)
This
allows a conditional probability to be computed more easily from smaller tables
using the chain rule.
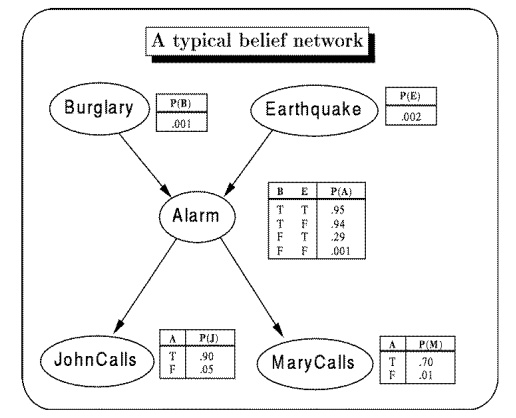
Bayesian Networks
Bayesian
networks, also called belief networks or Bayesian belief networks, express
relationships among variables by directed acyclic graphs with probability
tables stored at the nodes.[Example from Russell & Norvig.]
1
A burglary can set the alarm off
2
An earthquake can set the alarm off
3
The alarm can cause Mary to call
4
The alarm can cause John to call
Computing with Bayesian Networks
If a
Bayesian network is well structured as a poly-tree (at most one path between
any two nodes), then probabilities can be computed relatively efficiently. One
kind of algorithm, due to Judea Pearl, uses a message-passing style in which
nodes of the network compute probabilities and send them to nodes they are
connected to. Several software packages exist for computing with belief
networks.
A Hidden
Markov Model (HMM) tagger chooses the tag for each word that maximizes:
[Jurafsky, op. cit.] P(word | tag) * P(tag | previous n tags)
For a bigram
tagger, this is approximated as:
ti =
argmaxj P( wi | tj ) P( tj | ti - 1 )
In
practice, trigram taggers are most often used, and a search is made for the
best set of tags for the whole sentence; accuracy is about 96%.
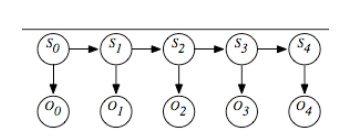
6. HIDDEN MARKOV MODELS
A hidden
Markov model (HMM) is an augmentation of the Markov chain to include
observations. Just like the state transition of the Markov chain, an HMM also
includes observations of the state. These observations can be partial in that
different states can map to the same observation and noisy in that the same
state can stochastically map to different observations at different times.
The
assumptions behind an HMM are that the state at time t+1 only depends on the
state at time t, as in the Markov chain. The observation at time t only depends
on the state at time t. The observations are modeled using the variable for
each time t whose domain is the set of possible observations. The belief
network representation of an HMM is depicted in Figure. Although the belief
network is shown for four stages, it can proceed indefinitely.
A
stationary HMM includes the following probability distributions:
P(S0)
specifies initial conditions.
P(St+1|St)
specifies the dynamics.
P(Ot|St)
specifies the sensor model.
There are
a number of tasks that are common for HMMs.
The
problem of filtering or belief-state monitoring is to determine the current
state based on the current and previous observations, namely to determine
P(Si|O0,...,Oi).
Note that
all state and observation variables after Si are irrelevant because they are
not observed and can be ignored when this conditional distribution is computed.
The
problem of smoothing is to determine a state based on past and future
observations. Suppose an agent has observed up to time k and wants to determine
the state at time i for i<k; the smoothing problem is to determine
P(Si|O0,...,Ok).
All of
the variables Si and Vi for i>k can be ignored.
Related Topics