Chapter: Artificial Intelligence
Partial Order Planning
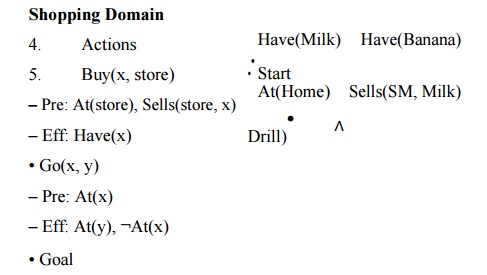
PARTIAL ORDER PLANNING
Partial-Order Planning Algorithms
Partially Ordered Plan
c)
Plan
d)
Steps
e)
Ordering constraints
f)
Variable binding constraints
g)
Causal links
h)
POP Algorithm
i)
Make initial plan
j)
Loop until plan is a complete
ŌĆō Select
a subgoal
ŌĆō Choose
an operator
ŌĆō Resolve
threats
Choose Operator
k)
Choose operator(c, Sneeds)
Choose a
step S from the plan or a new step S by instantiating an operator that has c as
an effect
If
thereŌĆÖs no such step, Fail
ŌĆó
Add causal link S _c Sneeds
ŌĆó
Add ordering constraint S < Sneeds
ŌĆó
Add variable binding constraints if necessary
ŌĆó
Add S to steps if necessary Nondeterministic choice
ŌĆó
Choose ŌĆō pick one of the options arbitrarily
ŌĆó
Fail ŌĆō go back to most recent non-deterministicŌłł choice and try a different one
that has not been tried before Resolve Threats
ŌĆó
A step S threatens a causal link Si c Sj iff ¬ c
effects(S) and itŌĆÖs possible that Si < S < Sj
ŌĆó
For each threat
Choose
ŌĆōPromote
S : S < Si < Sj
ŌĆōDemote S
: Si < Sj < S
If
resulting plan is inconsistent, then Fail
Threats
with Variables If c hasŌłł
variables in it, things are kind of tricky.
ŌĆó S is a
threat if there is any instantiation of
the variables that makes ¬ c effects(S)
ŌĆóWe could
possibly resolve the threat by adding a negative variable binding constraint,
saying that two variables or a variable and a constant cannot be bound to one
another
ŌĆó Another strategy is to ignore such threats until the very end, hoping that the variables will become bound and make things easier to deal with
Sells(SM,
Banana) Sells(HW,
Shopping
problem
sta rt At (Hom e)
Buy
(Drill) Buy
At (x2)
GO (HDW)
At(x1)
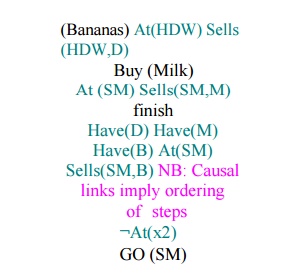
¬At(x1) start At (Home)
Buy
(Drill) Buy (Bananas)
At(HDW) Sells (HDW,D)
Buy
(Milk)
At (SM) Sells(SM,M)
finish
Have(D) Have(M) Have(B)
At(SM) Sells(SM,B)
NB: Causal links imply ordering
¬At(x1)
of steps ¬At(x2) GO (SM) At (x2) GO (HDW) At(x1)
start At (Home)
Buy
(Drill) Buy (Bananas)
At(HDW) Sells (HDW,D)
Buy
(Milk)
At (SM) Sells(SM,M) finish
Have(D) Have(M)
Have(B) At(SM) Sells(SM,B) x1=Home x2=Home NB: Causal links imply ordering of steps
¬At(x2) GO (SM) At (x2) GO (HDW)
At(x1)
¬At(x1)
start At (Home)
Buy
(Drill) Buy (Bananas)
At(HDW)
Sells (HDW,D)
Buy
(Milk)
At (SM)
Sells(SM,M)
finish
Have(D)
Have(M) Have(B) At(SM) Sells(SM,B) x1=Home x2=Home
NB:
Causal links imply ordering
of steps
¬At(x2)
GO (SM)
At (x2)
GO (HDW)
At(x1)
¬At(x1)
start
Buy
(Drill) Buy (Bananas) At(HDW) Sells (HDW,D)
Buy
(Milk)
At (SM)
Sells(SM,M) finish
Have(D)
Have(M) Have(B) At(SM) Sells(SM,B) x1=Home x2=Home
NB:
Causal links imply ordering of steps
start At
(Home)
Buy
(Drill) Buy (Bananas) At(HDW) Sells (HDW,D)
¬At(x2)
GO (SM) At (x2) Buy (Milk)
At (SM)
Sells(SM,M)
finish
Have(D)
Have(M) Have(B)
At(SM)
Sells(SM,B)
GO (HDW)
At(x1)
¬At(x1)
x1=Home x2=Home
3 start
At (Home)
Buy
(Drill) Buy (Bananas) At(HDW) Sells (HDW,D)
¬At(x2)
GO (SM)
GO (HDW)
At (x2)
Buy
(Milk)
At (SM)
Sells(SM,M)
finish
Have(D)
Have(M) Have(B)
At(SM)
Sells(SM,B)
At(x1)
¬At(x1) x1=Home x2=Home x2=HDW
start At
(Home)
Buy
(Drill) Buy (Bananas)
At(HDW)
Sells (HDW,D)
¬At(x2)
GO (SM)
At (x2)
Buy
(Milk)
At (SM)
Sells(SM,M)
finish
Have(D)
Have(M) Have(B)
At(SM)
Sells(SM,B)
GO (HDW)
At(x1)
¬At(x1)
x1=Home
x2=Home x2=HDW
start At
(Home)
Buy
(Drill) Buy (Bananas)
At(HDW)
Sells (HDW,D)
¬At(x2)
GO (SM)
At (x2)
Buy
(Milk)
At (SM)
Sells(SM,M)
finish
Have(D) Have(M) Have(B).
At(SM)
Sells(SM,B)
At(x1)
¬At(x1)
x1=Home x2=Home x2=HDW
PLANNING GRAPHS
┬Ę
Levels
┬Ę
Mutex between actions
┬Ę
Mutex holds between luents
┬Ę Graph plan algorithm
PLANNING AND ACTING IN THE REAL
WORLD
ŌĆó Conditional planning Or Contingency
Planning
ŌĆó Execution monitoring and replanning
Continuous planning
Multiagent
planning
ŌĆó Times, schedules, and resources
Critical
path method
ŌĆó
Hierarchical task network planning
Related Topics