Chapter: Artificial Intelligence
Modal Logics and Possible Worlds
Modal Logics and Possible Worlds
The forms of logic that we have dealt with so far
deal with facts and properties of objects that are either true or false.
In these classical logics, we do not consider the
possibility that things change or that things might not always be as they are
now.
Modal logics are an extension of classical logic
that allow us to reason about possibilities and certainties.
In other words, using a modal logic, we can express
ideas such as ŌĆ£although the sky is usually blue, it isnŌĆÖt alwaysŌĆØ (for example,
at night). In this way, we can reason about possible worlds.
A possible world is a universe or scenario that
could logically come about.
The following statements may not be true in our
world, but they are possible, in the sense that they are not illogical, and
could be true in a possible world:
Trees are all blue.
Dogs can fly.
People have no legs.
It is possible that some of these statements will
become true in the future, or even that they were true in the past.
It is also possible to imagine an alternative
universe in which these statements are true now.
The following statements, on the other hand, cannot
be true in any possible world:
A Ōł¦ ’┐óA
(x > y) Ōł¦ (y > z) Ōł¦ (z > x)
The first of these illustrates the law of the
excluded middle, which simply states that a fact must be either true or false:
it cannot be both true and false.
It also cannot be the case that a fact is neither
true nor false. This is a law of classical logic, it is possible to have a
logical system without the law of the excluded middle, and in which a fact can
be both true and false.
The second statement cannot be true by the laws of
mathematics. We are not interested in possible worlds in which the laws of
logic and mathematics do not hold.
A statement that may be true or false, depending on
the situation, is called contingent. A statement that must always have the same
truth value, regardless of which possible
world we consider, is noncontingent.
Hence, the following statements are contingent:
A Ōł¦ B
A Ōł© B
I like ice cream.
The sky is blue.
The following statements are noncontingent: A Ōł© ’┐óA
A Ōł¦ ’┐óA
If you like all ice cream, then you like this ice
cream.
Clearly, a noncontingent statement can be either
true or false, but the fact that it is noncontingent means it will always have
that same truth value.
If a statement A is contingent, then we say that A
is possibly true, which is written ŌŚŖ
A
If A is noncontingent, then it is necessarily true,
which is written Ō¢Ī A
Reasoning
in Modal Logic
It is not possible to draw up a truth table for the
operators ŌŚŖ and Ō¢Ī
The following rules are examples of the axioms that
can be used to reason in this kind of modal logic:
Ō¢ĪAŌåÆŌŚŖA
Ō¢Ī’┐óAŌåÆ’┐óŌŚŖA
ŌŚŖAŌåÆ’┐óŌ¢Ī A
Although truth tables cannot be drawn up to prove
these rules, you should be able to reason about them using your understanding
of the meaning of the ŌŚŖ and Ō¢Ī operators.
Possible
world representations
It describes method proposed by Nilsson which
generalizes firtst order logic in the modeling of uncertain beliefs
The method assigns truth values ranging from 0 to 1
to possible worlds
Each set of possible worlds corresponds to a
different interpretation of sentences contained in a knowledge base denoted as
KB
Consider the simple case where a KB contains only
the single sentence S, S may be either true or false. We envision S as being
true in one set of possible worlds W1 and false in another set W2
. The actual world , the one we are in, must be in one of the
two sets, but we are uncertain which one.
Uncertainty is expressed by assigning a probability P to W1 and 1 ŌĆō
P to W2. We can say then that the probability of S being true is P
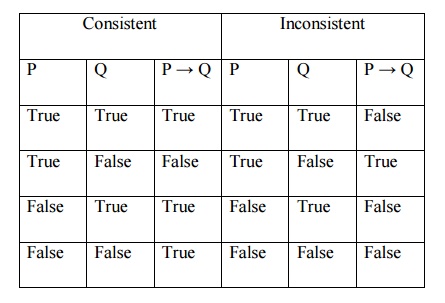
When KB contains L sentences, S1,ŌĆ” SL
, more sets of possible worlds are required to represent all consistent truth
value assignments. There are 2L possible truth assignments for L
sentences.
Truth Value assignments for the set {P. PŌåÆQ, Q}
They are based on the use of the probability
constraints
0 Ōēż pi Ōēż 1, and Ōłæi pi
= 1
The consistent probability assignments are bounded
by the hyperplanes of a certain convex hull
Related Topics