Chapter: Mechanical : Robotics : Robot Drive Systems and End Effectors
Various types of Gripper mechanisms
Various
types of Gripper mechanisms
Pivoting or Swinging Gripper Mechanisms:
This
is the most popular mechanical gripper for industrial robots. It can be
designed for limited shapes of an object, especially cylindrical work piece.
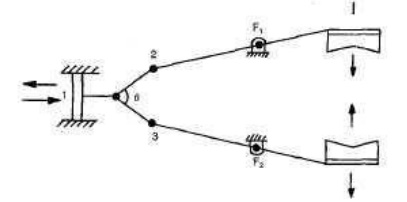
If actuators that produce linear movement are used,
like pneumatic piston-cylinders, the device contains a pair of slider-crank
mechanisms.
When the piston 1 is
pushed by pneumatic pressure to the right, the elements in the cranks 2 and 3,
rotate counter clockwise with the fulcrum F and clockwise with the fulcrum F
respectively, when B < 1800. These rotations make the grasping action at the
extended end of the crank elements 2 and 3.
The
releasing action can be obtained by moving the piston to the left. An angle B
ranging from 160° to is commonly used.
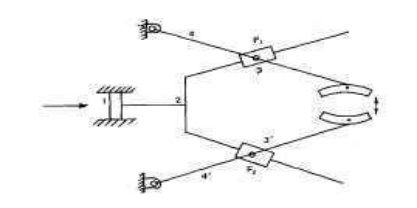
This is the swing block mechanism. The sliding rod
1, actuated by the pneumatic piston transmits motion by way of the two
symmetrically arranged swing-block linkages 1--2--3--4 and 1—2—3‘—4‘ to grasp
or release the object by means of the subsequent swinging motions of links 4
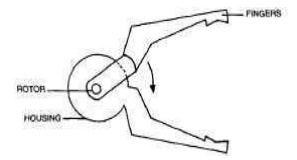
A gripper using a rotary actuator in which the
actuator is placed at the cross point of the two fingers. Each finger is
connected to the rotor and the housing of the actuator, respectively. The
actuator movement directly produces grasping and releasing actions.
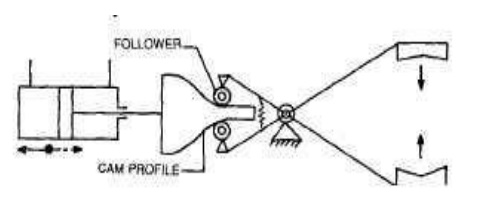
The cam actuated gripper includes a variety of
possible designs, one of which is shown.
A cam and follower arrangement, often using a
spring-loaded follower, can provide the opening and closing action of the
gripper. The advantage of this arrangement is that the spring action would
accommodate different sized objects.
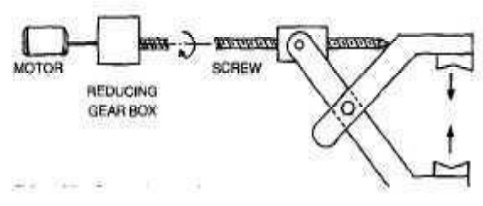
The screw is turned by a motor, usually accompanied
by a speed reduction mechanism. Due to the rotation of the screw, the threaded
block moves, causing the opening and dosing of the fingers depending on the
direction of rotation of the screw.
Related Topics