Chapter: Mechanical : Robotics : Robot Drive Systems and End Effectors
Grippers
Grippers
In robotics, an end effector is the device at the
end of a robotic arm, designed to interact
with the environment. The exact nature of this device depends on the
application of the robot.In the strict definition, which originates from serial
robotic manipulators, the end effector
means the last link (or end) of the robot. At this endpoint the tools are attached. In a wider
sense, an end effector can be seen as the part of a robot that interacts with
the work environment. This does not refer to the wheels of a mobile robot or the feet of ahumanoid robot which are also not
end effectors—they are part of the robot's mobility.
End
effectors may consist of a gripper or a tool. When referring to robotic
prehension there are four general categories of robot grippers, these are:
1.
Impactive –jaws or claws which
physically grasp by direct impact upon the object.
2.
Ingressive –pins, needles or hackles
which physically penetrate the surface of the object (used in textile, carbon
and glass fibre handling).
3.
Astrictive –suction [vague]
forces applied to the objects surface (whether by vacuum, magneto- or electroadhesion).
4.
Contigutive –requiring direct contact
for adhesion to take place (such as glue, surface tension or freezing).
They are based on different physical effects used to
guarantee a stable grasping between a gripper and the object to be grasped.
Industrial grippers can be mechanical, the most diffused in industry, but also
based on suction or on the magnetic force. Vacuum cups and electromagnets
dominate the automotive field and in particular metal sheet handling. Bernoulli
grippers exploit the airflow between the gripper and the part that causes a
lifting force which brings the gripper and part close each other (i.e. the Bernoulli's principle). Bernoulli
grippers are a type of contactless grippers, namely the object remains confined
in the force filed generated by the gripper without coming into direct contact
with it. Bernoulli gripper is adopted in Photovoltaic cell handling in silicon wafer handling but also in
textile or leather industry. Other principles are less used at the macro scale
(part size >5mm), but in the last ten years they demonstrated interesting
applications in micro-handling.
A gripper is a motion device that mimics the
movements of people, in the case of the gripper, it is the fingers. A gripper
is a d evice that holds an object so it can be manipulated. It has the ability
to hold and release an object while some action is being performed. The fingers
are not part of the gripper, they are specialized custom tooling used to grip
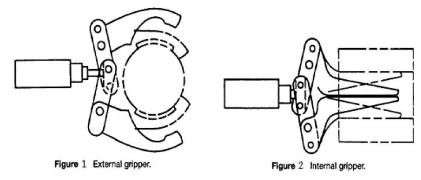
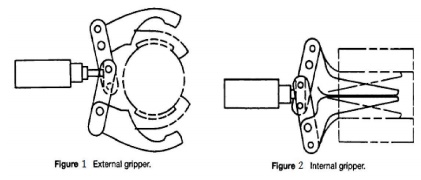
the object and are referred to as "jaws." Two main types of action
are performed by grippers:
External:
This
is the most popular method of holding objects, it is the most simplistic and it
requires the shortest stroke length. When the gripper jaws close, the
closing force of the gripper holds that object.
Related Topics