Chapter: Mechanical : Robotics : Robot Drive Systems and End Effectors
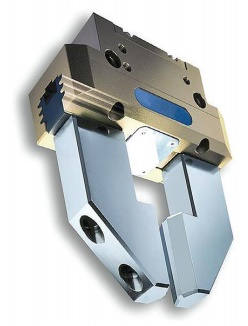
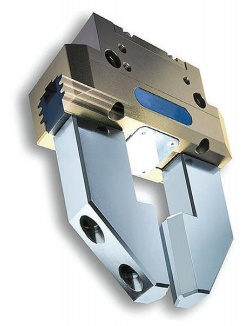
Hydraulic Grippers
Hydraulic
Grippers
Grippers
are devices used with pick-and-place robotic systems to pick up or place an
object on an assembly line, conveyor system, or other automated system.
Fingered tooling—or jaws—is attached to the grippers to grip or hold the
object.
They come in a variety of styles and powered
designs. Three common types are parallel, three-finger, and angled designs. The
most common are parallel designs, with two fingers that close on a workpiece to
grip it or open it out by creating pressure on the inside. Three-finger designs
hold the workpiece in the center, and have three fingers offset by 120°.
Finally, angled designs feature jaws that work at a variety of different angle
openings (for example, 30°, 40°, etc.).
In addition, three choices of power are available;
the most common being pneumatic grippers; electromechanical grippers are second
most common; and the least common being hydraulic grippers. Hydraulic grippers
are most often used in conjunction with a piece of equipment that only has a hydraulic
power source for actuators.
Most hydraulic grippers are designed for a hydraulic
system where the cylinder diameter is made with less surface area, meaning that
a hydraulic gripper would have the same force at 60 bar as a pneumatic gripper
of the same size at 6 bar.
In general, hydraulic and pneumatic grippers have
the same basic actuation principle. They include direct acting piston designs
as well as piston wedge designs.
The
direct acting piston design is used when a hydraulic force acts directly on a
piston that is directly connected to the jaw or finger that is touching or
gripping the part.
The
piston wedge design features a hydraulic force acting on a piston while the
piston itself is acting on a wedge. The wedge translates this force to the jaws
or fingers, providing the grip force to grip the part. The wedge can give a
mechanical advantage as it can increase grip force while keeping the piston
diameter and pressure to the piston the same. This allows more grip force in a
smaller package compared to the directing piston.
Unlike electromechanical grippers, which have motors
on each actuator, one single motor powers the hydraulic fluid that supplies
energy to multiple devices throughout a plant.When selecting a hydraulic
gripper, it is important to consider the following:
·
Part weight and size to be lifted
·
Part material
·
Clearance issues around the part that
could interfere with the gripping part
·
The environment the gripper will be used
in (corrosive, food or beverage, etc.)
·
The motion path of the robot or linear
device that is moving the gripper
·
The power supply that will be available
and the pressure ratings available
Related Topics