Chapter: Mechanical : Maintenance Engineering : Maintenance Policies and Preventive Maintenance
Scheduling Techniques: Critical Path Method
Scheduling
Techniques
Scheduling
is one of the areas that received considerable attention from researchers as well
as practitioners in all types of applications including operations scheduling
and project scheduling. Techniques are developed to develop optimum or near
optimal schedules with respect to different possible performance measures. This
chapter highlights some of these techniques and their application in
maintenance scheduling.
Critical
Path Method
To identify
the critical path
using the CPM
method we need
to follow the following steps:
1.
Develop the project network diagram as shown in
the previous section;
2. Perform
the CPM calculation to identify the critical jobs (there are jobs on the
critical paths and non-critical jobs (which are jobs with float);
3.
Perform
project crashing to
(determine minimum times
for each job)
reduce
project duration and investigate the cost tradeoffs; and
4. Level the resources in order
to have uniform manpower requirements to minimize hiring, firing, or overtime
requirements.
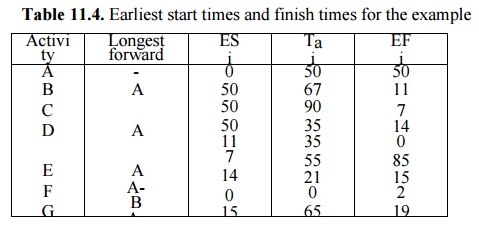
The critical path calculation includes two phases. The first
phase is the forward pass (starting with the first node and proceeding to the
last node). In this phase, the earliest start time, ES, and earliest finish
time, EF, are determined for each activity. The earliest start time ESi for a
given activity, i, is the earliest possible time in the schedule that activity
i can be started. Its value is determined by summing up the activity times of
the activities lying on the longest path leading to it. The earliest finish
time EFi for a given activity i, is its earliest start time plus its activity
time Tai. The calculations for the
bearing overhaul example are shown in Table 11.4.
Table 11.4. Earliest start times and finish
times for the example
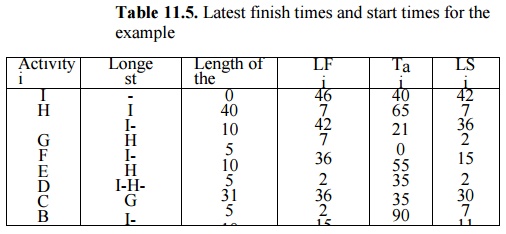
The second phase is the backward pass (starting with the last
node and proceeding back to the first node). We start this phase by assuming
that the total project time Tcp, is the earliest finish time, EF, of the last
activity found in the forward pass. In this phase, the latest finish time, LF,
and latest start time, LS, are determined for each activity. The latest finish
time LFi for a given activity, i, is the latest possible time that activity i
must be completed in order to finish the whole project on schedule. Its value
is determined by subtracting from Tcp the activity time along the longest path
leading backward from the last node. For the last activity of the schedule, LF
is set to be the total time duration of the project, Tcp. The latest finish
time, LFi , for a given activity, i, is its latest finish time minus its activity
time Tai. The calculations for the bearing overhaul example are shown in Table
11.5.
Table 11.5. Latest finish times and start
times for the example
The last step in the analysis of
the network is to determine the slack time for each activity Si. It can be
determined by the difference between the latest and the earliest start time of
the activity. The calculations are shown in Table 11.6 below.
Table 11.6. Slack times for the example
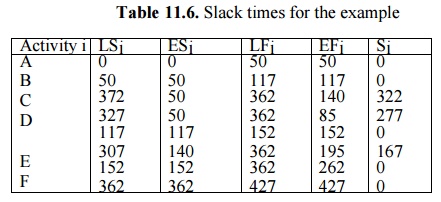
Note that the activities along
the critical path (A-B-E-G-H-I) have zero slack times. Activities not lying on
the critical path have positive slacks, meaning that they could be delayed by
an amount of time equal to their slack without delaying the project completion
time.
The construction of the time chart should be made taking into
consideration the available resources, and must take full advantage of the CPM
calculation. In some circumstances it might not be possible to schedule many activities
simultaneously because of personnel and equipment limitations. The total float
for non-critical activities can be used to level the resources and minimize the
maximum resource requirement. These activities can be shifted backward and
forward between maximum allowable limits and scheduled at an appropriate time
that levels the resources and keeps a steady workforce and equipment.
In addition to resource leveling, CPM involves project
crashing. In project crashing, the duration of one or more critical activities
are shortened in an optimal fashion and a curve is prepared to show the trade
off between time and cost. This will enable management to evaluate project
duration with the resulting cost. Network programming can be used to perform
crashing in an optimal fashion. For more on project scheduling, see Taha
(1992).
Related Topics