Chapter: Embedded Systems Design : Real-time operating systems
Resource protection
Resource protection
If a system is going to run multiple applications simultane-ously then
it must be able to ensure that one application doesn’t affect another. This is
done through several layers of resource protection. Resource protection within
MS-DOS and Windows 3.1 is a rather hit and miss affair. There is nothing to
stop an applica-tion from directly accessing an I/O port or other physical
device and if it did so, it could potentially interfere with another
applica-tion that was already using it. Although the Windows 3.1 environ-ment
can provide some resource protection, it is of collaboration level and not
mandatory. It is without doubt a case of self-regulation as opposed to obeying
the rules of the system.
Protecting memory
The most important resource to protect is memory. Each process is
allocated its own memory which is protected from interference by other
processes through programming the memory management unit. This part of the
processor’s hardware tracks the executing process and ensures that any access
to memory that it has not been allocated or given permission to use is stopped.
Protecting hardware
Hardware such as I/O devices are also protected by the memory management
unit and any direct access is prevented. Such accesses have to be made through
a device driver and in this way the device driver can control who has access to
a serial port and so on. A mechanism called a spinlock is also used to control
access. A process can only access a device or port if the associated spinlock
is not set. If someone else is using it, the process must wait until they have
finished.
Coping with crashes
If a process crashes then it is important for the operating system to
maintain as much of the system as possible. This requires that the operating
system as well as other applications must have its own memory and resources
given to it. To ensure this is the case, processes that are specific to user
applications are run in a user mode while operating system processes are
executed in a special kernel mode. These modes are kept separate from each
other and are protected. In addition, the operating system has to have detailed
knowledge of the resources used by the crashed process so that it can clean up
the process, remove it and thus free up the resources that it used. In some
special cases, such as power failures where the operating system may have a
limited amount of time to shut down the system in a controlled manner or save
as much of the system data as it can, resources are dedicated specifi-cally for
this functionality. For example, the second highest inter-rupt priority is
allocated to signalling a power failure.
Windows NT is very resilient to system crashes and while processes can
crash, the system will continue. This is essentially due to the use of user and
kernel modes coupled with extensive resource protection. Compared to Windows
3.1 and MS-DOS, this resilience is a big advantage.
Multi-threaded software
There is a third difference with Windows NT that many other operating
systems do not provide in that it supports multi-threaded processes. Processes
can support several independent processing paths or threads. A process may
consist of several independent sections and thus form several different threads
in that the context of the processing in one thread may be different from that
in another thread. In other words, the process has all the resources defined
that it will use and if the process can support multi-threaded operations, the
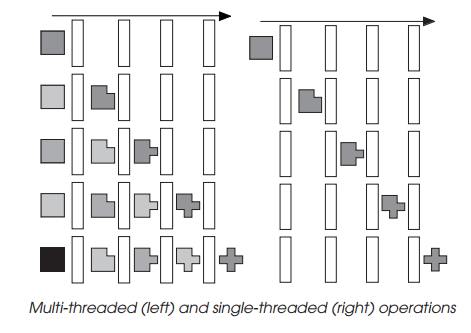
scheduler will see multiple threads going through the process. A good analogy
is a production line. If the production line is single threaded, it can only
produce a single end product at a time. If it is multi-threaded, it separates
the production process into several independent parts and each part can work on
a different product. As soon as the first operation has taken place, a second
thread can be started. The threads do not have to follow the same path and can
vary their route through the process.
The diagram shows a simple multi-threaded operation with each thread
being depicted by a different shading. As the first thread progresses through,
a second thread can be started. As that progresses through, a third can
commence and so on. The re-sources required to process the multiple threads in
this case are the same as if only one thread was supported.
The advantage of multi-threaded operation is that the proc-ess does not
have to be duplicated every time it is used: a new thread can be started. The
disadvantage is that the process pro-gramming must ensure that there is no
contention or conflict between the various threads that it supports. All the
threads that exist in the process can access each other’s data structures and
even files. The operating system which normally polices the environment is
powerless in this case. Threads within Windows NT derive their priority from
that of the process although the level can be adjusted within a limited range.
Addressing space
The addressing space within Windows NT is radically different from that
experienced within MS-DOS and Windows 3.1. It provides a 4 Gbyte virtual
address space for each process which is linearly addressed using 32 bit address
values. This is different from the segmented memory map that MS-DOS and Windows
have to use. A segmented memory scheme uses 16 bit addresses to provide address
spaces of only 64 kbytes. If addresses beyond this space have to be used,
special support is needed to change the segment address to point to a new segment.
Gone are the different types of memory such as extended and expanded.
This change towards a large 32 bit linear address space improves the
environment for software applications and increases their performance and
capabilities to handle large data structures. The operating system library that
the applications use is called WIN32 to differentiate it from the WIN16
libraries that Windows 3.1 applications use. Applications that use the WIN32
library are known as 32 bit or even native — this term is also used for Windows
NT applications that use the same instruction set as the host processor and
therefore do not need to emulate a different architecture.
To provide support for legacy MS-DOS and Windows 3.1 applications,
Windows NT has a 16 bit environment which simu-lates the segmented architecture
that these applications use.
Virtual memory
The idea behind virtual memory is to provide more memory than physically
present within the system. To make up the short-fall, a file or files are used
to provide overflow storage for applica-tions which are to big to fit in the
system RAM at one time. Such applications’ memory requirements are divided into
pages and unused pages are stored on disk.
When the processor wishes to access a page which is not resident in memory,
the memory management hardware asserts a page fault, selects the least used
page in memory and swaps it with the wanted page stored on disk. Therefore, to
reduce the system overhead, fast mass storage and large amounts of RAM are
normally required.
Windows NT uses a swap file to provide a virtual memory environment. The
file is dynamic in size and varies with the amount of memory that all the
software including the operating system, device driver, and applications
require. The Windows 3.1 swap file is limited to about 30 Mbytes in size and
this effectively limits the amount of virtual memory that it can support.
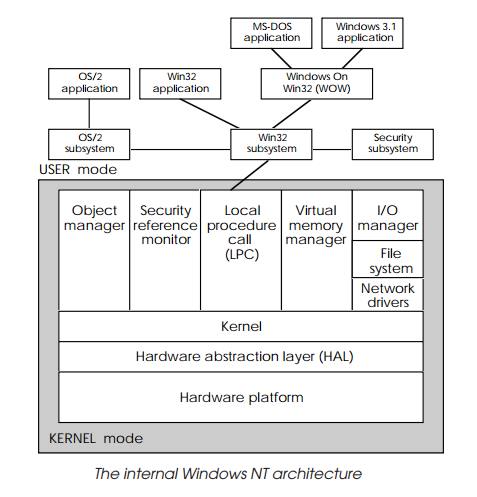
The internal architecture
The internal architecture is shown in the diagram below and depicts the
components that run in the user and kernel modes. Most of the operating system
runs in the kernel mode with the exception of the security and WIN32
subsystems.
The environments are protected in that direct hardware access is not
allowed and that a single application will run in a single environment. This
means that some applications or combi-nations may not work in the Windows NT
environment. On the other hand, running them in separate isolated environments
does prevent them from causing problems with other applications or the
operating system software.
Virtual memory manager
The virtual memory manager controls and supervises the memory
requirements of an operating system. It allocates to each process a private
linear address space of 4 Gbytes which is unique and cannot be accessed by
other processes. This is one reason why legacy software such as Windows 3.1
applications run as if they are the only application running.
With each process running in its own address space, the virtual memory
manager ensures that the data and code that the process needs to run is located
in pages of physical memory and ensures that the correct address translation is
performed so that process addresses refer to the physical addresses where the
infor-mation resides. If the physical memory is all used up, the virtual memory
manager will move pages of data and code out to disk and store it in a
temporary file. With some physical memory freed up, it can load from disk
previously stored information and make it available for a process to use. This
operation is closely associated with the scheduling process which is handled
within the kernel. For an efficient operating system, it is essential to
minimise the swapping out to disk — each disk swap impacts performance — and
the most efficient methods involve a close correlation with process priority.
Low priority processes are primary targets for moving information out to disk
while high priority processes are often locked into memory so that they offer
the highest perform-ance and are never swapped out to disk. Processes can make
requests to the virtual memory manager to lock pages in memory if needed.
User and kernel modes
Two modes are used to isolate the kernel and other compo-nents of the
operating system from any user applications and processes that may be running.
This separation dramatically improves the resilience of the operating system.
Each mode is given its own addressing space and access to hardware is made
through the operating system kernel mode. To allow a user process access, a
device driver must be used to isolate and control its access to ensure that no
conflict is caused.
The kernel mode processes use the 16 higher real-time class priority
levels and thus operating system processes will take preference over user
applications.
Local procedure call (LPC)
This is responsible for co-ordinating system calls from an application
and the WIN32 subsystem. Depending on the type of call and to some extent its
memory needs, it is possible for applications to be routed directly to the
local procedure call (LPC) without going through the WIN32 subsystem.
The kernel
The kernel is responsible for ensuring the correct operation of all the
processes that are running within the system. It provides the synchronisation
and scheduling that the system needs. Syn-chronisation support takes the form
of allowing threads to wait until a specific resource is available such as an
object, semaphore, an expired counter or other similar entity. While the thread
is waiting it is effectively dormant and other threads and processes can be
scheduled to execute.
The scheduling procedures use the 32 level priority scheme previously
described in this chapter and is used to schedule threads rather than
processes. With a process potentially support-ing multiple threads, the
scheduling operates on a thread basis and not on a process basis as this gives
a finer granularity and control. Not scheduling a multi-threaded process would
affect several threads which may not be the required outcome. Schedul-ing on a
thread basis gives far more control.
Interrupts and other similar events also pass through the kernel so that
it can pre-empt the current thread and reschedule a higher priority thread to
process the interrupt.
File system
Windows NT supports three types of file system and these different file
systems can co-exist with each other although there can be some restrictions if
they are accessed by non-Windows NT systems across a network, for example.
•
FAT
File allocation table is the file system used by MS-DOS and Windows 3.1
and uses file names with an 8 character name and a 3 character extension. The
VFAT system used by Windows 95 and supports long file names is also supported
with Windows NT v4 in that it can read Windows 95 long file names.
•
HPFS
High performance file system is an alternative file system used by OS/2
and supports file names with 254 characters with virtually none of the
character restrictions that the FAT system imposes. It also uses a write
caching to disk tech-nique which stores data temporarily in RAM and writes it
to disk at a later stage. This frees up an application from waiting until the
physical disk write has completed. The physical disk write is performed when
the processor is either not heavily loaded or when the cache is full.
•
NTFS
The NT filing system is Windows NT’s own filing system which conforms to
various security recommendation and allows system administrators to restrict
access to files and directories within the filing system.
All three filing systems are supported — Windows NT will even truncate
and restore file names that are not MS-DOS compat-ible — and are selected
during installation.
Network support
As previously stated, Windows NT supports most major networking
protocols and through its multi-tasking capabilities can support several
simultaneously using one or more network connections. The drivers that do the
actual work are part of the kernel and work closely with the file system and
security modules.
I/O support
I/O drivers are also part of the kernel and these provide the link
between the user processes and threads and the hardware. MS-DOS and Windows 3.1
drivers are not compatible with Win-dows NT drivers and one major difference
between Windows NT and Windows 3.1 is that not all hardware devices are
supported. Typically modern devices and controllers can be used but it is wise
to check the existence of a driver before buying a piece of hardware or moving
from Windows 3.1 to Windows NT.
HAL approach
The hardware abstraction layer (HAL) is designed to pro-vide portability
across different processor-based platforms and between single and
multi-processor systems. In essence, it defines a piece of virtual hardware
that the kernel uses when it needs to access hardware or processor resources.
The HAL layer then takes the virtual processor commands and requests and
translates them to the actual processor system that it is actually using. This
may mean a simple mapping where a Windows NT interrupt level corresponds to a
processor hardware interrupt but it can involve a complete emulation of a
different processor. Such is the case to support MS-DOS and Windows 3.1
applications where an Intel 80x86 processor is emulated so that an Intel
instruction set can be run.
With the rest of Windows NT being written in C, a portable high level
language, the only additional work to the recompilation and testing is to write
a suitable HAL layer for the processor platform that is being used.
Related Topics