Chapter: Embedded Systems Design : Real-time operating systems
Commercial operating systems
Commercial operating systems
pSOS+, pSOS+ kernel, pSOS multiprocessor kernel, pSOS+m, pREPC+ runtime support, pHILE+ file system, pNA+ network manager, pROBE+ system level debugger, XRAY+ source level debugger, OS-9, VXWorks, VRTX-32, IFX, TNX, RTL, RTscope, MPV, LynxOS-POSIX conformance, Windows NT.
pSOS+
pSOS+ is the name of a popular multitasking real-time operating system.
Although the name refers to the kernel itself, it is often used in a more
generic way to refer to a series of develop-ment tools and system components.
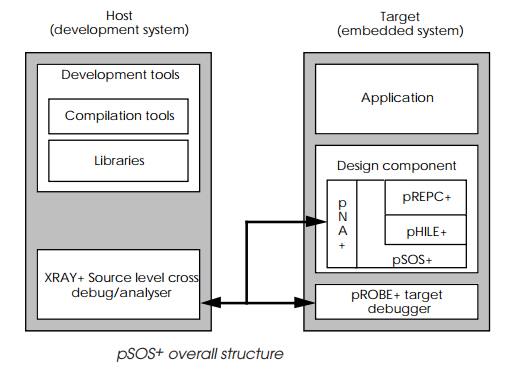
The best way of looking at the products is to use the overall structure as
shown in the diagram. The box on the left is concerned with the development
environ-ment while that on the right are the software components that are used
in the final target system. The two halves work together via communication
links such as serial lines, Ethernet and TCP/IP protocol or even over the
VMEbus itself.
pSOS+ kernel
The kernel supports a wide range of processor families like the Motorola
M68000 family, the Intel 80x86 range, and the M88000 and i960 RISC processors.
It is small in size and typically takes about 15–20 kbytes of RAM, although the
final figure will depend on the configuration and processor type.
It supports more than 50000 system objects such as tasks, memory
partitions, message queues and so on and will execute time-critical routines
consistently irrespective of the application size. In other words, the time to
service a message queue is the same irrespective of the size of the message.
Note that this will refer to the time taken to pass the message or perform the
service only and does not and cannot take into account the time taken by the
user to handle messages. In other words, the consistent timing refers to the
message delivery and not the actions taken as a result of the message. Worst
case figures for interrupt latency and context switch for an MC68020 running at
25 MHz are 6 and 19 µs respectively. Among its 55 service calls, it provides support for:
•
Task management
•
Message queues
•
Event services
•
Semaphore services
•
Asynchronous services
•
Storage allocation services
•
Time management and timer
services
•
I/O supervisor services
•
Interrupt management
•
Error handling services
pSOS multiprocessor kernel
pSOS+m is the multiprocessing version of the kernel. From an application or
task’s perspective, it is virtually the same as the single processor version
except that the kernel now has the ability to send and receive system objects
from other processors within the system. The application or task does not know
where other tasks actually reside or the communication method used to link
them.
The communication mechanism works in this way. Each processor runs its
own copy of the kernel and has a kernel interface to the media used for linking
the processors, either a VMEbus backplane or a network. When a task sends a
message to a local task, the local processor will handle it. If the message is
for task running on another node, the local operating system will look up the
recipient’s identity and location. The message is then routed across the kernel
interface across to the other processor and its operating system where the
message is finally delivered. Different kernel interfaces are needed for
different media.
pREPC+ runtime support
This is a compiler independent run-time environment for C applications.
It is compatible with the ANSI X3J11 technical com-mittee’s proposal for C
run-time functionality and provides 88 functions that can be called from C
programs. Services supported include formatted I/O, file I/O and string
manipulation.
pREPC+ is not a standalone product because it uses pSOS+ or pSOS+m for device I/O and task
functions and calls pHILE+ for file and disk I/O. Its routines are re-entrant which allows
multiple tasks to use the same routine simultaneously.
pHILE+ file system
This product provides file I/O and will support either the MS-DOS file
structure or its own proprietary formats. The MS-DOS structure is useful for
data interchange while the proprietary format is designed to support the
highest data throughput across a wide range of devices. pHILE+ does not drive physical devices
directly but provides logical data via pSOS+ to a device driver task that converts this information to physical data
and drives the storage device.
pNA+ network manager
This is a networking option that provides TCP/IP commu-nication over a
variety of media such as Ethernet and FDDI. It conforms to the UNIX 4.3 BSD
socket syntax and approach and is compatible with other TCP/IP–based networking
standards such as ftp and NFS.
As a result, pNA+ is used to provide efficient downloading and debugging communication
between the target and a host development system. Alternatively, it can be used
to provide a communication path between other systems that are also sitting on
the same network.
pROBE+ system level debugger
This is the system level debugger which provides the sys-tem and low
level debugging facilities. With this, system objects can be inspected or even
used to act as breakpoints if needed. It can use either a serial port to
communicate with the outside world or if pNA+ is installed, use an TCP/IP link instead.
XRAY+ source level debugger
This is a complementary product to pROBE+ as it can use the debugger
information and combine it with the C source and other symbolic information on
the host to provide a complete integrated debugging environment.
OS-9
OS-9 was originally developed by Microware and Motorola as a real-time
operating system for the Motorola MC6809 8 bit processor and it appeared on
many 6809-based systems such as the Exorset 165 and the Dragon computer. It
provided a true hierarchical filing system and the ability to run multiple
tasks. It has since been ported to the M68000 family and the Intel 80x86
processor families. It is best described as a complete operating system with
its own user commands, interface and so on. Unlike other products which have
concentrated on the central kernel and then built outwards but stopping at
below the user and utility level, OS-9 goes from a multi-user multitasking
interface with a range of utilities down to the low level kernel. Early on it
sup ported UNIX by using and supporting the same library interface and similar
system calls. So much so that one of its strengths was the ability to take UNIX
source code, recompile it and then run it.
One criticism has been its poor real-time response although a new
version has been released which used a smaller, compact and faster kernel to
provide better performance. The full facilities are still provided by the
addition of other kernel services around the inner one. It provides more
sophisticated support such as multimedia extensions which other operating
systems do not, and because of this and its higher level of utilities and
expansion has achieved success in the marketplace.
VXWorks
VXWorks has taken another approach to the problem of providing a
real-time environment as well as standard software tools and development
support. Instead of creating its own or reproducing a UNIX-like environment, it
actually has integrated with UNIX to provide its development and operational
environ-ment. Through VXWorks’ UNIX compatible networking facilities, it can
combine with UNIX to form a complete run-time solution as well. The UNIX system
is responsible for software development and non-real-time debugging while the
VXWorks kernel is used for testing, debugging and executing the real-time
applications, either standalone or part of a network with UNIX.
How does this work? The UNIX system is used as the development host and
is used to edit, compile, link and administer the building of real-time code.
These modules can then be burned into ROM or loaded from disk and executed standalone
under the VXWorks kernel. This is possible because VXWorks can under-stand the
UNIX object module format and has a UNIX compatible software interface. By
using the standard UNIX pipe and socket mechanisms to exchange data between
tasks and by using UNIX signals for asynchronous events, there is no need for
recompilation or any other conversion routines. Instead, the programmer can use
the same interface for both UNIX and VXWorks software without having to learn
different libraries or programming commands. It supports the POSIX 1003.4
real-time extensions and multiprocess-ing support for up to 20 processors is
offered via another option called VxMP.
The real key to VXWorks is its ability to network with UNIX to allow a
hybrid system to be developed or even allow individual modules or groups to be
transferred to run in a VXWorks environ-ment. The network can be over an
Ethernet or even using shared memory over a VMEbus, for example.
VRTX-32
VRTX-32 from Microtec Research has gained a reputation for being an
extremely compact but high performance real-time kernel. Despite being compact
— typically about 8 kbytes of code for an MC68020 system — it provides task
management facilities, inter-task communication, memory control and allocation,
clock and timer functions, basic character I/O and interrupt handling
facilities.
Under the name of VRTXvelocity, VRTX-32 systems can be designed using
cross-development platforms such as Sun workstations and IBM PCs. The systems
can be integrated with the host, usually using an Ethernet, to provide an
integrated approach to system design.
IFX
Its associated product IFX (input/output file executive) provides
support for more complicated I/O subsystems such as disks, terminals, and
serial communications using structures such as pipes, null devices, circular
buffers and caches. The file system is MS-DOS compatible although if this is
not required, disks can be treated as single partitions to speed up response.
TNX
This is the TCP/IP networking package that allows nodes to communicate
with hosts and other applications over the Ethernet. The Ethernet device itself
can either be resident on the processor board or accessible across a VMEbus. It
supports both stream and datagram sockets.
RTL
This is the run-time library support for Microtec and Sun compilers and
provides the library interface to allow C programs to call standard I/O
functions and make VRTX-32 calls.
RTscope
This is the real-time multitasking debugger and system monitor that is
used to debug VRTX tasks and applications. It operates on two levels: the board
level debugger provides the standard features such as memory and register
display and modify, software upload and download and so on. In the VRTX-32
system monitor mode, tasks can be interrogated, stopped, suspended and
restarted.
MPV
The multiprocessor VRTX-32 extensions allow multiple processors each
running their own copy of VRTX to pass messages and other task information from
one processor to another and thus create a multiprocessor system. The messages
are based across the VMEbus using shared memory although other links such as
RS232 or Ethernet are possible.
LynxOS-POSIX conformance
POSIX (IEEE standard portable operating system interface for computer
environments) began in 1986 as an attempt to provide an open standard for
operating system support. The ideas behind it are to provide vendor
independence, protection from technical obsolescence, the availability of
standard off-the-shelf applications, the preservation of software investment
and to pro-vide connectivity between computers.
It is based on UNIX but has added a set of real-time extensions as
defined in the POSIX 1003.4 document. These cover a more sophisticated
semaphore system which uses the open() call to create them. This call is more normally
associated with opening a file. The facilities include persistent semaphores
which retain their binary state after their last use, and the ability to force
a task to wait for a semaphore through a locking mechanism.
The extensions also provide a process or task locking mecha-nism which
prevents memory pages associated with the task or process from being swapped
out to memory, thus improving the real-time response for critical routines.
Shared memory is better supported through the provision of the shmmap() call
which will allocate a sheared memory block. Both asynchronous and syn-chronous
I/O and inter-task message passing are supported along with real-time file
extensions to speed up file I/O. This uses techniques such as preallocating
file space before it is required.
At the time of writing LynxOS is the main real-time product that
supports these standards, although many others support parts of the POSIX
standard. Indeed, there is an increasing level of support for this type of
standardisation.
However, it is not a complete panacea and, while any attempt for
standardisation should be applauded, it does not solve all the issues.
Real-time operating systems and applications are very different in their needs,
design and approach, as can be seen from the diversity of products that are
available today. Can all of these be met by a single standard? In addition, the
main cost of developing software is not in porting but in testing and
document-ing the product and this again is not addressed by the POSIX standards.
POSIX conformance means that software should be portable across processors and
platforms, but it does not guaran-tee it. With many of today’s operating
systems available in ver-sions for the major processor families, is the POSIX
portability any better? Many of these questions are yet to be answered
conclu-sively by supporters or protagonists.
An alternative way of looking at this problem is: do you assume that a
ported real-time product will work because it is POSIX compliant without
testing it on the new target? In most cases the answer will be no and that
testing will be needed. What POSIX conformance has given is a helping hand in
the right direction and this should not be belittled, neither should it be seen
as a miracle cure. In the end, the success of the POSIX standards will depend
on the market and users seeing benefit in its approach. It is an approach that
is gathering pace, and one that the real-time market should be aware of. It is
possible that it may succeed where other attempts at a real-time interface
standard have failed. An-other possibility for POSIX conformance is Windows NT.
Windows NT
Windows NT has been portrayed as many different things during its short
lifetime. When it first appeared, it was perceived by many as the replacement
for Windows 3.1, an alternative to UNIX, and finally has settled down as an
operating system for workstations, servers and power users. This chameleon-like
change was not due to any real changes in the product but were caused by a
mixture of aspirations and misunderstandings.
Windows NT is rapidly replacing Windows 3.1 and Win-dows 95 and parts of
its technology have already found them-selves incorporated into Windows 95 and
Windows for Workgroups. Whether the replacement is through a merging of the
operating system technologies or through a sharing of com-mon technology, only
time will tell. The important message is that the Windows NT environment is
becoming prevalent, especially with Microsoft’s aim of a single set of
programming interfaces that will allow an application to run on any of its
operating system environments. Its greater stability and reliability is another
fea-ture that is behind its adoption by many business systems in preference
over Windows 95. All this is fine, but how does this fit with an embedded
system?
There are several reasons why Windows NT is being used in real-time
environments. It may not have the speed of a dedi-cated RTOS but it has the
important features and coupled with a fast processor, reasonable performance.
•
Portability
Most PC-based operating systems were written in low-level assembler
language instead of a high level language such as C or C++. This decision was
taken to provide smaller programs sizes and the best possible performance. The
disadvantage is that the operating system and applica-tions are now dependent
on the hardware platform and it is extremely difficult to move from one
platform to another. MS-DOS is writen in 8086 assembler which is incompatible
with the M68000 processors used in the Apple Macintosh. For a software company
like Microsoft, this has an addi-tional threat of being dependent on a single
processor platform. If the platform changes — who remembers the Z80 and 6502
processors which were the mainstays of the early PCs — then its software
technology becomes obsolete.
With an operating system that is written in a high level language and is
portable to other platforms, it allows Microsoft and other application
developers to be less hard-ware dependent.
•
True multitasking
While more performant operating systems such as UNIX and VMS offer the
ability to run multiple applications simultaneously, this facility is not
really available from the Windows and MS-DOS environments (a full explanation
of what they can do and the difference will be offered later in this chapter).
This is now becoming a very important aspect for both users and developers
alike so that the full perform-ance of today’s processors can be utilised.
•
Multi-threaded
Multi-threading refers to a way of creating software that can be reused
without having to have multiple copies of the code or memory spaces. This leads
to more efficient use of both memory and code.
•
Processor independent
Unlike Windows and MS-DOS which are completely linked to the Intel 80x86
architecture, Windows NT through its portability is processor independent and
has been ported to other processor architectures such as Motorola’s PowerPC,
DEC’s Alpha architecture and MIPS RISC processor sys-tems.
•
Multiprocessor support
Windows NT uses a special interface to the processor hardware which
makes it independent of the processor architecture that it is running on. As a
result, this not only gives processor independence but also allows the
operating system to run on multiprocessor systems.
•
Security and POSIX support
Windows NT offers several levels of security through its use of a
multi-part access token. This token is created and verified when a user logs
onto the system and contains IDs for the user, the group he is assigned to,
privileges and other information. In addition, an audit trail is also provided
to allow an administrator to check who has used the system, when they used it
and what they did. While an overkill for a single user, this is invaluable with
a system that is either used by many or connected to a network.
The POSIX standard defines a set of interfaces that allow POSIX
compliant applications to easily be ported between POSIX compliant computer
systems.
Both security and POSIX support are commercially essen-tial to satisfy
purchasing requirements from government departments, both in the US and the
rest of the world.
Windows NT characteristics
Windows NT is a pre-emptive multitasking environment that will run
multiple applications simultaneously and uses a priority based mechanism to
determine the running order. It is capable of providing real-time support in
that it has a priority mechanism and fast response times for interrupts and so
on, but it is less deterministic — there is a wider range of response times
— when compared to a real-time operating system such as pSOS or OS-9
used in industrial applications. It can be suitable for many real-time
applications with less critical timing characteristics and this is a big
advantage over the Windows 3.1 and Windows 95 environments. It is interesting
to note that this technology now forms the backbone of all the Windows software
environments.
Process priorities
Windows NT calls all applications, device drivers, software tasks and so
on processes and this nomenclature will be used from now on. Each process can
be assigned one of 32 priority levels which determines its scheduling priority.
The 32 levels are di-vided into two groups called the real-time and dynamic
classes.
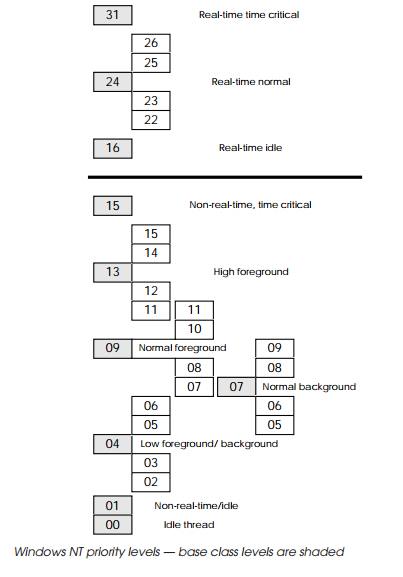
The real-time classes comprise priority levels 16 through to 31 and the
dynamic classes use priority levels 15 to 0. Within these two groups, certain
priorities are defined as base classes and processes are allocated a base
process. Independent parts of a process — these are called threads — can be
assigned their own priority levels which are derived from the base class
priority and can be ±2 levels different. In addition, a process cannot move from a real-time
class to a dynamic one.
The diagram shows how the base classes are organised. The first point is
that within a given dynamic base class, it is possible for a lot of overlap.
Although a process may have a lower base class compared to another process, it
may be at a higher priority than the other one depending on the actual priority
level that has been assigned to it. The real-time class is a little simpler
although again there is some possibility for overlap.
User applications like word processors, spread sheets and so on run in
the dynamic class and their priority will change depending on the application
status. Bring an application from the background to the foreground by expanding
the shrunk icon or by switching to that application will change its priority
appropriately so that it gets allocated a higher priority and therefore more
processing. Real-time processes include device drivers handling the keyboard,
cursor, file system and other similar activities.
Interrupt priorities
The concept of priorities is not solely restricted to the pre-emption
priority previously described. Those priorities come into play when an event or
series of events occur. The events them-selves are also controlled by 32
priority levels defined by the hardware abstraction layer (HAL).
The interrupt priorities work in a similar way to those found on a
microprocessor: if an interrupt of a higher priority than the current interrupt
priority mask is generated, the current processing will stop and be replaced by
the associated routines for the new higher priority level. In addition, the
mask will be raised to match that of the higher priority. When the higher
priority processing has been completed, the previous processing will be
restored and allowed to continue. The interrupt priority mask will also be
restored to its previous value.
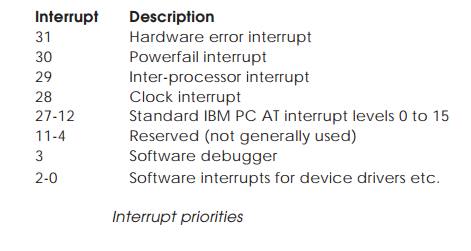
Within Windows NT, the interrupt processing is also sub-ject to the
multitasking priority levels. Depending on how these are assigned to the
interrupt priority levels, the processing of a high priority interrupt may be
delayed until a higher priority process has completed. It makes sense therefore
to have high priority interrupts processed by processes with high priority
scheduling levels. Comparing the interrupts and the priority levels shows that
this maxim has been followed. Software inter-rupts used to communicate between
processes are allocated both low interrupt and scheduling priorities. Time
critical interrupts such as the clock and inter-processor interrupts are
handled as real-time processes and are allocated the higher real-time
sched-uling priorities.
The combination of both priority schemes provides a fairly complex and
flexible method of structuring how external and internal events and messages
are handled.
Related Topics