Chapter: An Introduction to Parallel Programming : Parallel Program Development
Performance of the serial implementations
Performance of the serial implementations
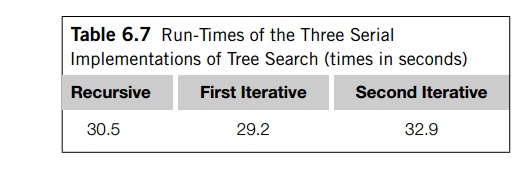
The run-times of the three
serial implementations are shown in Table 6.7. The input digraph contained 15
vertices (including the hometown), and all three algorithms vis-ited
approximately 95,000,000 tree nodes. The first iterative version is less than
5% faster than the recursive version, and the second iterative version is about
8% slower than the recursive version. As expected, the first iterative solution
eliminates some of the overhead due to repeated function calls, while the
second iterative solution is slower because of the repeated copying of tour
data structures. However, as we’ll see, the second iterative solution is
relatively easy to parallelize, so we’ll be using it as the basis for the
parallel versions of tree search.
Related Topics