Chapter: An Introduction to Parallel Programming : Parallel Program Development
Nonrecursive depth-first search
Since
function calls are expensive, recursion can be slow. It also has the
disadvantage that at any given instant of time only the current tree node is
accessible. This could be a problem when we try to parallelize tree search by
dividing tree nodes among the threads or processes.
It
is possible to write a nonrecursive depth-first search. The basic idea is
modeled on recursive implementation. Recall that recursive function calls can
be implemented by pushing the current state of the recursive function onto the
run-time stack. Thus, we can try to eliminate recursion by pushing necessary
data on our own stack before branching deeper into the tree, and when we need
to go back up the tree—either because we’ve reached a leaf or because we’ve
found a node that can’t lead to a better solution—we can pop the stack.
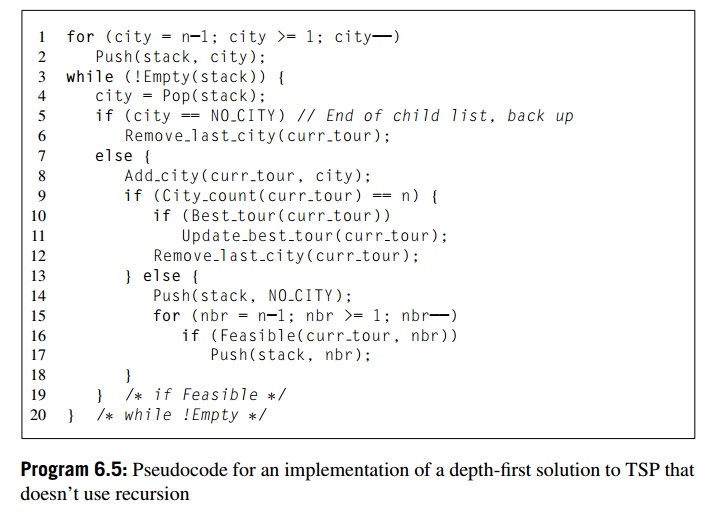
This
outline leads to the implementation of iterative depth-first search shown in
Program 6.5. In this version, a stack record consists of a single city, the
city that will be added to the tour when its record is popped. In the recursive
version we continue to make recursive calls until we’ve visited every node of
the tree that corresponds to a feasible partial tour. At this point, the stack
won’t have any more activation records for calls to Depth_first_search, and
we’ll return to the function that made the
original
call to Depth_first_search. The main control structure in our iterative
ver-sion is the while loop extending from Line 3 to Line 20, and the loop
termination condition is that our stack is empty. As long as the search needs
to continue, we need to make sure the stack is nonempty, and, in the first two
lines, we add each of the non-hometown cities. Note that this loop visits the
cities in decreasing order, from n-1 down to 1. This is because of the order
created by the stack, whereby the stack pops the top cities first. By reversing
the order, we can insure that the cities are visited in the same order as the
recursive function.
Also
notice that in Line 5 we check whether the city we’ve popped is the constant
NO_CITY. This constant is used so that we can tell when we’ve visited all of
the chil-dren of a tree node; if we didn’t use it, we wouldn’t be able to tell
when to back up in the tree. Thus, before pushing all of the children of a node
(Lines 15–17), we push the NO_CITY marker.
An
alternative to this iterative version uses partial tours as stack records (see
Program 6.6). This gives code that is closer to the recursive function.
However, it also results in a slower version, since it’s necessary for the
function that pushes onto the stack to create a copy of the tour before
actually pushing it on to the stack. To emphasize this point, we’ve called the
function Push_copy. (What happens if we sim-ply push a pointer to the current
tour onto the stack?) The extra memory required will probably not be a problem.
However, allocating storage for a new tour and copying the existing tour is
time-consuming. To some degree we can mitigate these costs by saving freed
tours in our own data structure, and when a freed tour is available we can use
it in the Push_copy function instead of calling malloc.
On
the other hand, this version has the virtue that the stack is more or less
independent of the other data structures. Since entire tours are stored,
multiple threads or processes can “help themselves” to tours, and, if this is
done reasonably carefully,
Pppppppppppppppppp
it
won’t destroy the correctness of the program. With the original iterative
version, a stack record is just a city and it doesn’t provide enough
information by itself to show where we are in the tree.
Related Topics