Chapter: An Introduction to Parallel Programming : Parallel Program Development
Parallelizing the reduced solver using OpenMP
Parallelizing the reduced solver
using OpenMP
The reduced solver has an additional inner
loop: the initialization of the forces array to 0. If we try to use the same
parallelization for the reduced solver, we should also parallelize this loop
with a for directive. What happens if we try this? That
is, what happens if we try to parallelize the reduced solver with the following
pseudocode?
# pragma omp parallel
for each
timestep {
if (timestep output) {
# pragma omp single
Print positions and velocities of particles;
}
# pragma omp for
for each particle q forces[q] = 0.0;
# pragma omp for
for each particle q
Compute total force on q;
# pragma omp for
for each particle q
Compute position and velocity of q;
}
Parallelization of the initialization of the
forces should be fine, as there’s no depen-dence among the iterations. The
updating of the positions and velocities is the same in both the basic and
reduced solvers, so if the computation of the forces is OK, then this should
also be OK.
How does parallelization affect the correctness
of the loop for computing the forces? Recall that in the reduced version, this
loop has the following form:
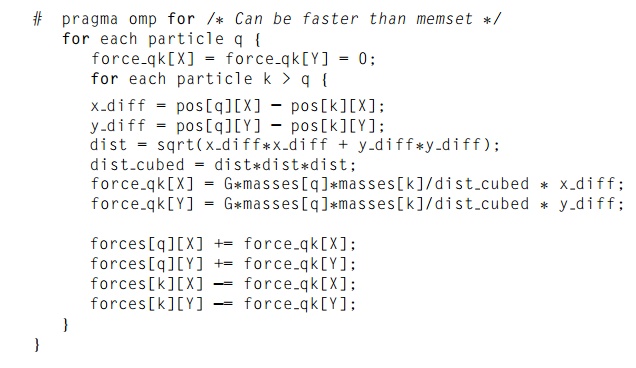
As before, the variables of interest are pos, masses, and forces, since the values in the remaining variables
are only used in a single iteration, and hence, can be private. Also, as
before, elements of the pos and masses arrays are only read, not updated. We
therefore need to look at the elements of the forces array. In this version, unlike the basic
version, a thread may update elements of the forces array other than those corresponding to its
assigned particles. For example, suppose we have two threads and four particles
and we’re using a block partition of the particles. Then the total force on
particle 3 is given by
F3 = f03 - f13 - f23.
Furthermore, thread 0 will compute f03 and f13, while
thread 1 will compute f23. Thus,
the updates to forces[3] do create a race condition. In general, then, the updates to the
elements of the forces array introduce race conditions into the code.
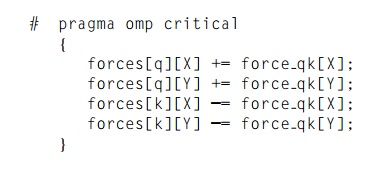
A seemingly obvious solution to this problem is
to use a critical directive to limit access to the elements of the forces array. There are at least a couple of ways to do this. The
simplest is to put a critical directive before all the updates to forces
However, with this approach access to the
elements of the forces array will be effectively serialized. Only one
element of forces can be updated at a time, and contention for access to the
critical section is actually likely to seriously degrade the performance of the
program. See Exercise 6.3.
An alternative would be to have one critical
section for each particle. However, as we’ve seen, OpenMP doesn’t readily
support varying numbers of critical sections, so we would need to use one lock
for each particle instead and our updates would This assumes that the master
thread will create a shared array of locks, one for each particle, and when we
update an element of the forces array, we first set the lock corresponding to
that particle. Although this approach performs much bet-ter than the single
critical section, it still isn’t competitive with the serial code. See Exercise
6.4.
Another possible solution is to carry out the
computation of the forces in two phases. In the first phase, each thread
carries out exactly the same calculations it carried out in the erroneous
parallelization. However, now the calculations are stored in its own array of forces. Then, in the second phase,
the thread that has been assigned particle q will add the contributions that have been computed by the
different threads. In our example above, thread 0 would compute -f03 -f13, while
thread 1 would compute -f23. After
each thread was done computing its contributions to the forces, thread 1, which
has been assigned particle 3, would find the total force on particle 3 by
adding these two values.
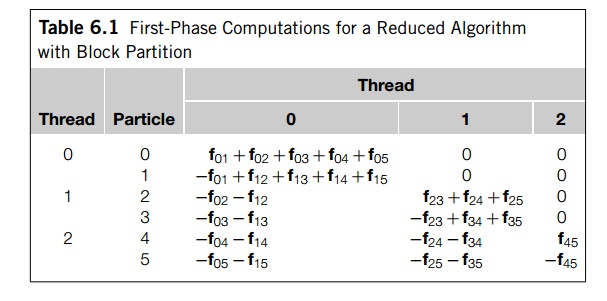
Let’s look at a slightly larger example.
Suppose we have three threads and six particles. If we’re using a block
partition of the particles, then the computations in the first phase are shown
in Table 6.1. The last three columns of the table show each thread’s
contribution to the computation of the total forces. In phase 2 of the
computation, the thread specified in the first column of the table will add the
contents of each of its assigned rows—that is, each of its assigned particles.
Note that there’s nothing special about using a
block partition of the particles. Table 6.2 shows the same computations if we
use a cyclic partition of the particles.
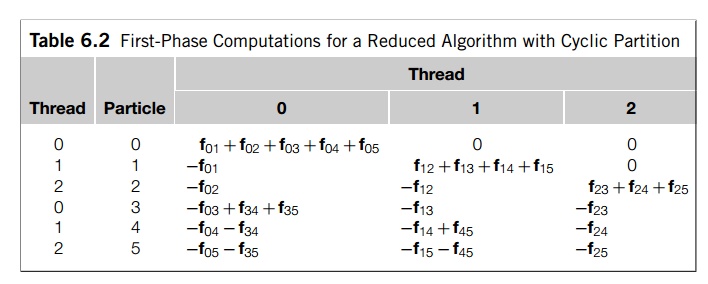
Note that if we compare this table with the
table that shows the block partition, it’s clear that the cyclic partition does
a better job of balancing the load.
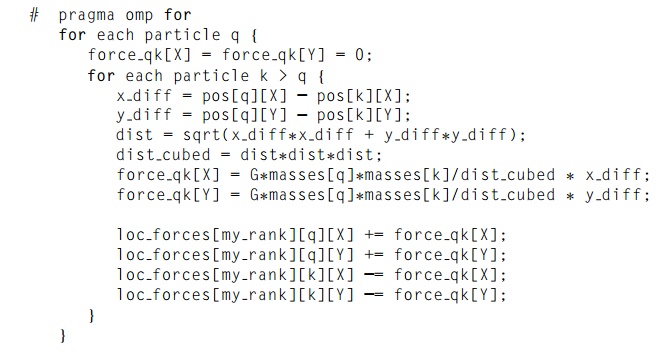
To implement this, during the first phase our
revised algorithm proceeds as before, except that each thread adds the forces
it computes into its own subarray of loc_forces:
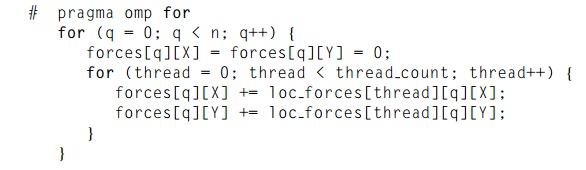
During the second phase, each thread adds the
forces computed by all the threads for its assigned particles:
Before moving on, we should make sure that we
haven’t inadvertently introduced any new race conditions. During the first
phase, since each thread writes to its own subarray, there isn’t a race
condition in the updates to loc_forces. Also, during the second phase, only the
“owner” of thread q writes to forces[q], so there are no race conditions in the second
phase. Finally, since there is an implied barrier after each of the
parallelized for loops, we don’t need to worry that some thread is going to race
ahead and make use of a variable that hasn’t been properly initialized, or that
some slow thread is going to make use of a variable that has had its value
changed by another thread.
Related Topics