Chapter: Digital Signal Processing : Signals and System
Important Short Questions and Answers: Signals and System
CLASSIFICATION OF SIGNALS AND
SYSTEMS
1. Define Signal.
A signal
is a function of one or more independent variables which contain some
information. Eg: Radio signal, TV signal, Telephone signal etc.
2. Define System.
A system
is a set of elements or functional block that are connected together and
produces an output in response to an input signal.
Eg: An
audio amplifier, attenuator, TV set etc.
3. Define CT signals.
Continuous
time signals are defined for all values of time. It is also called as an analog
signal and is represented by x(t).
Eg: AC
waveform, ECG etc.
4. Define DT signal.
Discrete
time signals are defined at discrete instances of time. It is represented by
x(n). Eg: Amount deposited in a bank per month.
5. Give few examples for CT signals.
AC
waveform, ECG,Temperature recorded over an interval of time etc.
6. Give few examples of DT signals.
Amount
deposited in a bank per month,
7. Define unit step,ramp and delta functions for
CT.
Unit step
function is defined as
U(t) = 1
for t >= 0
0
otherwise
Unit ramp
function is defined as
r(t) = t
for t>=0
0 for
t<0
Unit
delta function is defined as
δ(t)= 1
for t=0
8. State the relation between step, ramp and delta
functions (CT).
The
relationship between unit step and unit delta function is
δ (t) =
u(t)
The
relationship between delta and unit ramp function is
δ (t).dt
= r(t)
9. State the classification of CT signals.
The CT
signals are classified as follows
·
Periodic and non periodic signals
·
Even and odd signals
·
Energy and power signals
·
Deterministic and random signals.
10. Define deterministic and random signals.
A
deterministic signal is one which can be completely represented by mathematical
equation at any time. In a deterministic signal there is no uncertainty with
respect to its value at any time.
Eg:
x(t)=coswt
x(n)=2wft
A random
signal is one which cannot be represented by any mathematical equation. Eg:
Noise generated in electronic components, transmission channels, cables etc.
11. Define Random signal.
There is
no uncertainty about the deterministic signal. It is completely represented by
mathematical expression.
The
signal x(t) is said to be power signal, if and only if the normalized average
power p is finite and non-zero.
ie.
0<p<4
A signal
x(t) is said to be energy signal if and only if the total normalized energy is
finite and non-zero.
ie.
0<E< 4
13. Compare power and energy signals.
POWER SIGNAL
1. The
normalized average power is finite and non-zero
2.
Practical periodic signals are power signals
ENERGY SIGNALS
1. Total
normalized energy is finite and non- zero.
2.
Non-periodic signals are energy signals
14. Define odd and even signal.
A DT
signal x(n) is said to be an even signal if x(-n)=x(n) and an odd signal if
x(-n)=-x(n).
15. Define periodic and aperiodic signals.
·
A signal is said to be periodic signal if it
repeats at equal intervals.
·
Aperiodic signals do not repeat at regular
intervals.
·
A CT signal which satisfies the equation x(t) =
x(t+T0) is said to be periodic and a DT signal which satisfies the equation
x(n) = x(n+N) is said to be periodic.
The DT
and CT systems are according to their characteristics as follows
(i).
Linear and Non-Linear systems
(ii).
Time invariant and Time varying systems.
(iii).
Causal and Non causal systems.
(iv).
Stable and unstable systems.
(v).
Static and dynamic systems.
(vi).
Inverse systems.
17. Define linear and non-linear systems.
A system
is said to be linear if superposition theorem applies to that system. If it
does not satisfy the superposition theorem, then it is said to be a nonlinear
system.
18. What are the properties linear system should
satisfy?
A linear
system should follow superposition principle. A linear system should satisfy,
f [ a1
x1(t) + a2 x2 (t)] = a 1y1(t)
+ a2 y2 (t)
where y1(t)
= f [ x1(t) ]
y2(t)
= f[ x2 (t) ]
19. What is the criterion for the system to possess
BIBO stability?
A system
is said to be BIBO stable if it produces bounded output for every bounded
input.
20. Define shift invariance.
If the
system produces same shift in the output as that of input, then it is called
shift invariance or time invariance system. i.e.,
f [ x( t
- t1 ) ] = y ( t - t1 )
21. Define Causal and non-Causal systems.
A system
is said to be a causal if its output at anytime depends upon present and past
inputs only. A system is said to be non-causal system if its output depends
upon future inputs also.
22. Define time invariant and time varying systems.
A system
is time invariant if the time shift in the input signal results in
corresponding time shift in the output. A system which does not satisfy the
above condition is time variant system.
23. Define stable and unstable systems.
When the
system produces bounded output for bounded input, then the system is called
bounded input, bounded output stable. A system which does not satisfy the above
condition is called a unstable system.
24. Define Static and Dynamic system.
A system
is said to be static or memory less if its output depends upon the present
input only. The system is said to be dynamic with memory if its output depends
upon the present and past input values.
25. Check causality of the system given by, y(n) =
x(n-no)
If no
≥ 0, then output y(n) depends upon present or past input. Hence the system is
causal. If no < 0 , the system become noncausal.
26. Check whether the given system is causal and
stable.
y ( n ) = 3 x ( n - 2) + 3 x ( n + 2 )
Since y (
n ) depends upon x(n+2), this system is noncausal. As long as x (n – 2) and x (
n + 2 ) are bounded, the output y(n) will be bounded. Hence this system is
stable.
27. When the discrete signal is said to be even?
A
discrete time signal is said to be even when, x(-n) = x( n ).
For
example cos(ωn) is an even signal.
28. Is diode a linear device? Give your reason.
Diode is
nonlinear device since it operates only when forward biased. For negative bias,
diode does not conduct.
29. Define power signal.
A signal
is said to be power signal if its normalized power is nonzero and finite. i.e.,
0 < P < ∞
30. Define signal. What are classifications of
signals?
A
function of one or more independent variables which contain some information is
called signal.
31. What is the periodicity of x(t) = ej100Πt
+ 30o?
Here x(t)
= ej100Πt + 30o
Comparing
above equation with ejωt+Ф, we get ω = 100 Π. Therefore period T is
given as,
T=2 Π/ ω
= 2 Π /100 Π = 1/50 = 0.02 sec.
32. Find the fundamental period
of the signal x(n) = 3 ej3Π(n+1/2)
X(n) = 3/5 ej 3Πn. ej3Π/2
= -j3/5 ej3Πn
Here,
ω=3Π, hence, f=3/2=k/N. Thus the fundamental period is N = 2.
33. Is the discrete time system describe by the
equation y (n) = x(-n) causal or non causal ? Why?
Here y(n)
= x(-n). If n = -2 then, y(-2 )= x(2)
Thus the
output depends upon future inputs. Hence system is noncausal.
34. Is the system describe by the equation y(t) =
x(2t) Time invariant or not? Why?
Output
for delayed inputs becomes, y(t,t1) =x(2t-t1)
Delayed
output will be, y(t-t1) = x[2(t-t 1)]
Since
y(t,t1) ≠ y(t-t1) . The system is shift variant.
35. What is the period T of the signal x(t) = 2cos
(n/4)?
Here, x
(n) = 2cos (n/4) .
Compare
x(n) with Acos (2∏ fn). This gives,
2∏fn =
n/4 => F =1/8 ∏. Which is not rational.
Hence
this is not periodic signal.
36. Is the system y(t) = y(t-1) + 2t y(t-2) time
invariant ?
Here
y(t-t1) = y(t-1-t1) + 2t y(t-2-t1) and
y(t t1) =
y(t-t1-1) + 2(t- t1) y(t-t1-2).
Here
y(t-t1) ≠ y(t t1). This is time variant system.
37. Check Whether the given system is causal and
stable. y ( n ) = 3 x ( n - 2) + 3 x ( n + 2 )
Since y
(n) depends upon x(n+2), this system is noncausal. As long as x (n – 2) and x(n
+ 2) are bounded, the output y(n) will be bounded. Hence this system is stable.
38. What is the periodicity of x(t) = ej100Πt
+ 30o ?
Here x(t)
= ej100Πt + 30o
Comparing
above equation with ejωt+Ф , we get ω = 100 Π. Therefore period T is
given as, T=2 Π/ ω = 2 Π /100 Π = 1/50 = 0.02 sec.
39. Find the fundamental period of the signal x(n)=
3 ej3Π(n+1/2)
X(n) =
3/5 ej 3Πn. ej3Π/2
= -j3/5 ej3Πn
Here,
ω=3Π, hence, f=3/2=k/N. Thus the fundamental period is N = 2.
40. Define Sampling.
41. What is an anti-aliasing filter?
A filter
that is used to reject high frequency signals before it is sampled to reduce
the aliasing is called anti-aliasing filter.
42. Define Sampling Theorem.
A band
limited signal of finite energy, which has no frequency components higher than
W hertz is completely described by specifying the value of the signal at
instants of time separated by 1/2W seconds.
A band
limited signal of finite energy which has no frequency components higher than W
hertz is completely recovered from the knowledge of its samples taken at the
rate of 2W samples per second, where W = 2fm. These statements can
be combinedly stated as
A
bandlimited signal x(t) with X(j ω) = 0 for |ω| > ωm is uniquely
determined from its samples x(nT), if the sampling frequency fs ≥ 2fm,
ie., sampling frequency must be atleast twice the highest frequency present in
the signal.
43.Define Nyquist rate and Nyquist interval.
Nyquist
rate = 2fm samples/second
Nyquist
interval: It is the time interval between any two adjacent samples when
sampling rate is Nyquist rate.
Nyquist
interval = 1/2W or 1/2fm
44.Define aliasing.
When the
high frequency interferes with low frequency and appears as low frequency, then
the phenomenon is called aliasing.
45.What are the effects of aliasing?
The
effects of aliasing are,
·
Since high and low frequencies interferes with each
other distortion is generated
·
The data is lost and it cannot be recovered
A band
limited signal is a signal x(t) for which the Fourier transform of x(t) is Zero
above certain frequency ωm.
x(t) <
-- > X(j ω) = 0 for |ω| > ωm = 2πfm
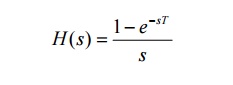
47.What is the transfer function of a zero order
hold?
The
transfer function of a zero order hold is given by
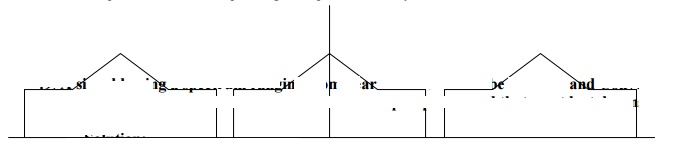
48.A signal x(t) whose spectrum is shown in figure
is sampled at a rate of 300 samples/sec. What is the spectrum of the sampled
discrete time signal.
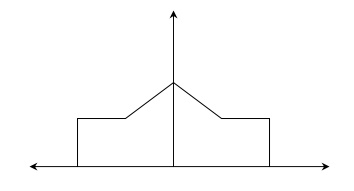
Solution:
fm
= 100 Hz
Nyquist
rate = 2fm = 200 Hz
Sampling
frequency = fs = 300 Hz
fs
> 2fm , Therefore no aliasing takes place
The
spectrum of the sampled signal repeats for every 300 Hz.
49. A signal having a spectrum ranging from near dc to 10 KHz is be
sampled and Converted to discrete form. What is the minimum number of samples
per second that must be take ensure recovery?
Solution:
Given: fm
= 10 KHz
From
Nyquist rate the minimum no. of samples per second that must be taken to ensure
recovery is,
fs
= 2fm
= 2× 10 K = 20000samples/sec
50. A signal x(t) = sinc (150πt) is sampled at a rate of a) 100 Hz, b) 200
Hz, and c) 300Hz. For each of these cases, explain if you can recover the
signal x(t) from the sampled signal.
Solution:
Given
x(t) = sinc (150πt)
The
spectrum of the signal x(t) is a rectangular pulse with a bandwidth (maximum
frequency component) of 150π rad/sec as shown in figure.
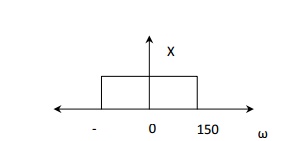
2πfm
= 150π
fm
= 75 Hz
Nyquist
rate is 2fm = 150 Hz
·
For the first case the sampling rate is 100Hz,
which is less than Nyquist rate (under sampling). Therefore x(t) cannot be
recovered from its samples.
·
And (c) in both cases the sampling rate is greater
than Nyquist rate. Therefore x(t) can be recovered from its sample.
51. How can you minimize the aliasing error?
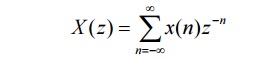
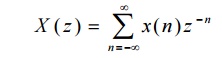
52. Define z-transform and inverse z-transform.
The
z-transform of a general discrete-time signal x(n) is defined as,
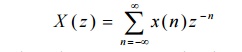
It is
used to represent complex sinusoidal discrete time signal.
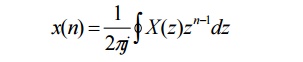
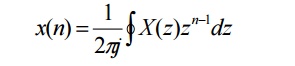
The
inverse z-transform is given by,
53. What do you mean by ROC? (or) Define Region of
convergence.

The
z-transform exists when the infinite sum in equation (1) converges. A necessary
condition for convergence is absolute summability of x(n)z-n. The
value of z for which the z-transform converges is called region of convergence.
54. What are left sided sequence and right sided
sequence?
Left
sided sequence is given by
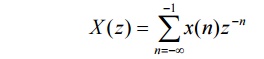
For this
type of sequence the ROC is entire z-plane except at z = ∞.
Example:
x(n) = {-3, -2, -1, 0}
Right
sided sequence is given by
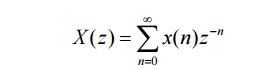
For this
type of sequence the ROC is entire z-plane except z = 0.
Example:
x(n) = { 1,0,3,-1,2}
55. Define two sided sequence (or) signal.
For such
a type of sequences the ROC is entire z-plane except at z=0 and z=∞.
Example:
x(n) = { 2,-1,3,2,1,0,2,3,-1}
56. List the properties of region of convergence
for the z-transform.
·
The ROC of X(z) consists of a ring in the z-plane
centered about the origin.
·
The ROC does not contain any poles.
·
If x(n) is of finite duration then the ROC is the
entire z-plane except z = 0 and / or z = ∞.
·
If x(n) is a right sided sequence and if the circle
|z| = r0 is in the ROC then all finite values of z for which |z|
> r0 will also be in the ROC.
·
If x(n) is a left sided sequence and if the circle
|z| = r0 is in the ROC then all values of z for which 0< |z| <
r0 will also be in the ROC.
·
If x(n) is two sided sequence and if the circle |z|
= r0 is in the ROC then the ROC will consist of a ring in the
z-plane that includes the circle |z| = r0.
57. Determine the z-transform of the signal x(n) =
αn u(n) and also the ROC and pole & zero locations of X(z) in
the z-plane.
Solution:
Given
x(n) = αn u(n)

58. List the properties of z-transform.
·
Linearity
·
Time shifting
·
Time reversal
·
Time scaling
·
Multiplication
·
Convolution
·
Parseval’s relation
59. What are the methods used to find inverse
z-transform?
·
Long division method (or) Power series expansion
·
Residue method
·
Partial fraction method
·
Convolution method
60. State the Parseval’s theorem of z-transform.
If x1(n)
and x2(n) are complex valued sequences, then the Parseval’s relation states
that,

61.Determine the z-transform of unit step sequence.
The unit
step sequence is given

The ROC
is at z > 1 ie., the area outside the unit circle
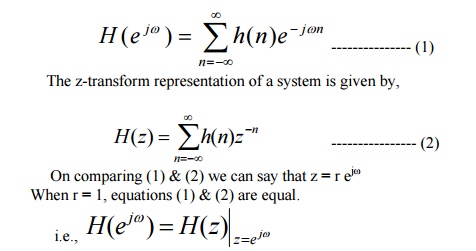
62. What is the relationship between the
z-transform and FourierTransform?
The
Fourier transform representation of a system is given by,
63.Determine the z-transform of the signal x(n) =
-anu(-n-1) & plot the ROC. Solution:
Given:
x(n) = -anu(-n-1)
By
definition of z-transform,

64. Find the left sided z-transform of the given
sequence x[n]={2,4,-6,3,8,-2} Solution:
By
definition of z-transform
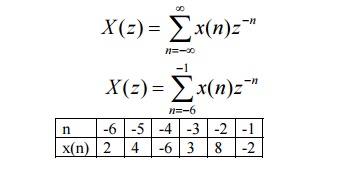
X(z) =
x(-6)z6+x(-5)z5+x(-4)z4+x(-3)z3+x(-2)z2+x(-1)z
X(z) = 2z6+4z5+3z4+3z3+8z2+-2z
The ROC
is entire z-plane except at z = ∞
65. How the stability of a system can be found in
z-transform?
Let h(n)
be a impulse response of a causal or non-causal LTI system and H(z) be the
z-transform ofh(n). The stability of a system can be found from ROC using the
theorem which states,
‘A Linear
time system with the system function H(z) is BIBO stable if and only if the ROC
for H(z) contains the unit circle.

66. What is the condition for causality in terms of
z-transform?
h(n) = 0,
n<0.
Where
h(n) is the sample response of the system.
When the
sequence is causal , its ROC is the exterior of the circle. i.e., |z|>r. LTI
system is causal if and only if the ROC of the system function is exterior of
the circle.
67. Find the system function and the impulse
response of the system Described by the difference equation,
y(n) = x(n)+2x(n-1)-4x(n-2)+x(n-3) Solution:
The given
difference equation is y(n) = x(n)+2x(n-1)-4x(n-2)+x(n-3) Taking z-transform,
Y(z) =
X(z)+2z-1X(z) – 4z-2X(z)+z-3X(z)
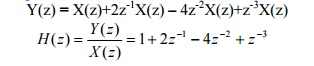
The
system function, H (z) = 1+ 2z −1 − 4z −2 + z −3
The
impulse response is h(n) = {1,2,-4,1}
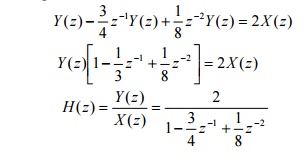
68.
Consider an LTI system with difference equation,
y(n)- 3/4
y(n-1)+1/8 y(n-2) = 2x(n). Find H(z).
Solution:
Given,
y(n)-3/4 y(n-1)+1/8 y(n-2) = 2x(n) Taking z-transform,
69. State and prove the time shifting property of z-transform.
The time
shifting property of z-transform states that
if X(z) =
z{x(n)}then x(n-k) ↔ z-k
X(z)
where k
is an integer.
Proof:
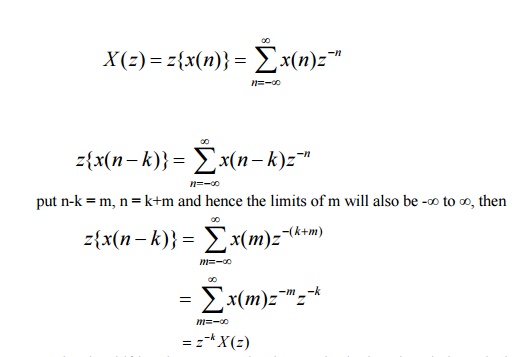
Thus by
shifting the sequence by ’k’ samples in time domain is equivalent to
multiplying its z-transform by z-k.
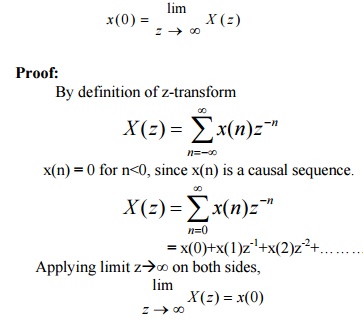
70.State
initial value theorem of z-transform.
If x(n)
is a causal sequence then its initial value is given by
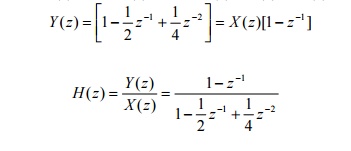
71.
Determine the system function of the discrete system described by difference
equation y(n)-1/2 y(n-1)+1/4 y(n-2) = x(n)-x(n-1).
Solution:
y(n)-1/2
y(n-1)+1/4 y(n-2) = x(n)-x(n-1) Taking z-transform,
Y(z)
-1/2z-1Y(z) + 1/4z-2Y(z) = X(z)-z-1X(z)
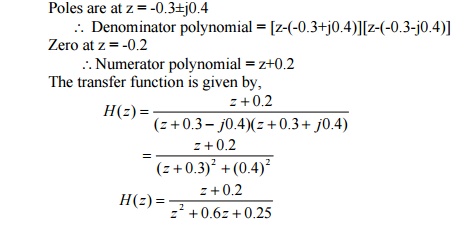
72. What is
the transfer function of a system whose poles are at -0.3±j0.4 and a zero at -0.2?
Poles are
at z = -0.3±j0.4
∴
Denominator polynomial = [z-(-0.3+j0.4)][z-(-0.3-j0.4)] Zero at z = -0.2
∴
Numerator polynomial = z+0.2 The transfer function is given by,
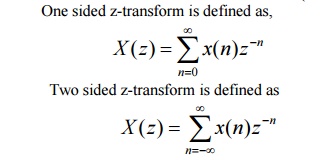
73.
Define one-sided and two-sided z-transform. (Nov/Dec 2004)
One sided
z-transform is defined as,
74. State
any two properties of autocorrelation function.
i.
A fundamental property of the autocorrelation is symmetry, R(i)=R(-i), which is easy to prove from the definition.
ii. The autocorrelation of a periodic function is, itself, periodic with the same period.
75. State convolution property.
Convolution
property states that if x1
(n)← z→ X1 (z) and
x2 (n)← z→ X 2 (z)
Then x1 (n) ∗ x2 (n)← z→ X1 (z)X 2 (z)
GLOSSARY:
1. Signal.
A signal
is a function of one or more independent variables which contain some
information. Eg: Radio signal, TV signal, Telephone signal etc.
2. System.
A system
is a set of elements or functional block that are connected together and
produces an output in response to an input signal.
Eg: An
audio amplifier, attenuator, TV set etc.
3. Continuous Time signals.
Continuous
time signals are defined for all values of time. It is also called as an analog
signal and is represented by x(t).
Eg: AC
waveform, ECG etc.
4. Discrete Time signals.
Discrete
time signals are defined at discrete instances of time. It is represented by
x(n). Eg: Amount deposited in a bank per month.
5. Sampling.
Sampling
is a process of converting a continuous time signal into discrete time Signal.
After sampling the signal is defined at discrete instants of time and the time
Interval between two subsequent sampling instants is called sampling interval.
6.Anti-aliasing filter.
A filter
that is used to reject high frequency signals before it is sampled to reduce
the aliasing is called anti-aliasing filter.
7. Nyquist rate: When the sampling rate becomes
exactly equal to 2W samples/sec, for
a given bandwidth of fm or W Hertz, then it is called as Nyquist rate.
Nyquist
rate = 2fm samples/second.
8. Z-transform and Inverse z-transform.
The
z-transform of a general discrete-time signal x(n) is defined as,
It is
used to represent complex sinusoidal discrete time signal.
The
inverse z-transform is given by,
9. Region of convergence.

The
z-transform exists when the infinite sum in equation (1) converges. A necessary
condition for convergence is absolute summability of x(n)z-n. The
value of z for which the z-transform converges is called region of convergence.
10. Left sided sequence and Right sided sequence
Left
sided sequence is given by
For this
type of sequence the ROC is entire z-plane except at z = ∞.
Right
sided sequence is given by
For this
type of sequence the ROC is entire z-plane except z = 0.
11. Parseval’s theorem of z-transform.
If x1(n)
and x2(n) are complex valued sequences, then the Parseval’s relation states
that,

12. LTI System.
A System
is said to be linear and Time Invariant if it Satisfies the Superposition
Principle and if the input is delayed than the output also delayed by the same
amount.
Related Topics