Chapter: Digital Signal Processing : Signals and System
Discrete Time Signals and System
DISCRETE TIME SIGNALS AND SYSTEM
There are three ways to represent discrete time
signals.
1)
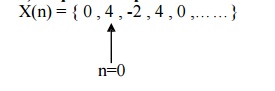
Functional Representation

2) Tabular method of representation

3)
Sequence Representation
1. STANDARD SIGNAL SEQUENCES
1) Unit sample signal (Unit impulse
signal)

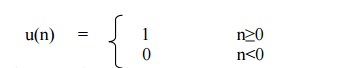
2) Unit step signal
3) Unit ramp signal

4) Exponential signal

5) Sinusoidal waveform

2. PROPERTIES OF DISCRETE TIME SIGNALS
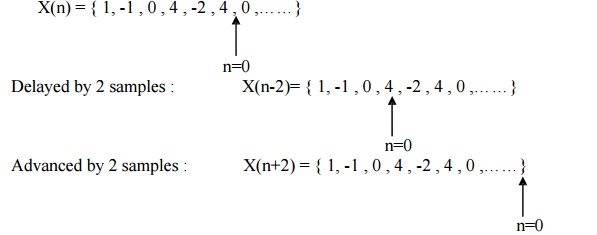
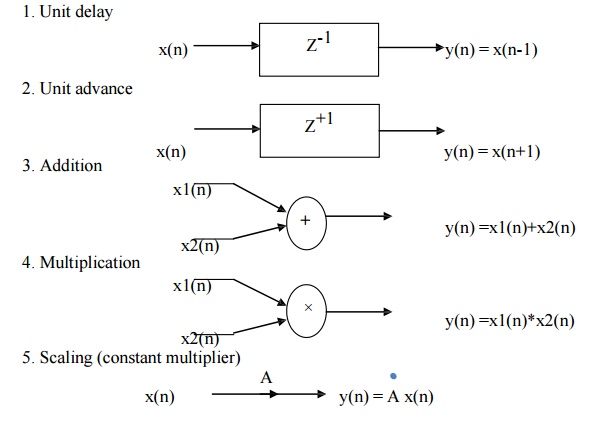
1) Shifting : signal x(n) can be shifted
in time. We can delay the sequence or advance the sequence. This is done by
replacing integer n by n-k where k is integer. If k is positive signal is
delayed in time by k samples (Arrow get shifted on left hand side) And if k is
negative signal is advanced in time k samples (Arrow get shifted on right hand
side)
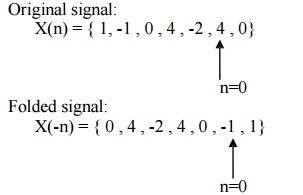
2) Folding / Reflection : It is folding of signal about time origin n=0. In this case replace n by – n.
3) Addition : Given signals are x1(n) and
x2(n), which produces output y(n) where y(n) = x1(n)+ x2(n). Adder generates
the output sequence which is the sum of input sequences.
4) Scaling: Amplitude scaling can be done
by multiplying signal with some constant. Suppose original signal is x(n). Then
output signal is A x(n)
4) Multiplication : The product of two
signals is defined as y(n) = x1(n) * x2(n).
3. SYMBOLS USED IN DISCRETE TIME
SYSTEM
4. CLASSIFICATION OF DISCRETE TIME SYSTEMS
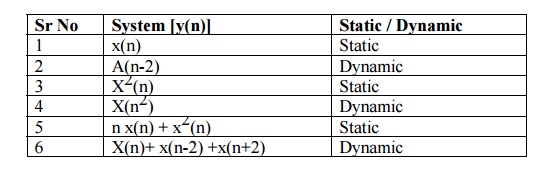
1. STATIC v/s DYNAMIC

It is
very easy to find out that given system is static or dynamic. Just check that
output of the system solely depends upon present input only, not dependent upon
past or future.
2) TIME INVARIANT v/s TIME VARIANT SYSTEMS
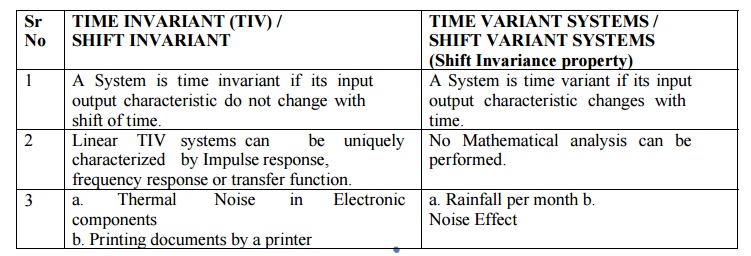
It is
very easy to find out that given system is Shift Invariant or Shift Variant.
Suppose if the system produces output y(n) by taking input x(n)
x(n) -> y(n)
If we
delay same input by k units x(n-k) and apply it
to same systems, the system produces output y(n-k)
x(n-k)
-> y(n-k)
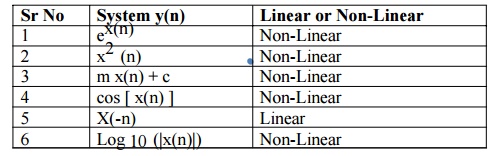
3) LINEAR v/s NON-LINEAR SYSTEMS
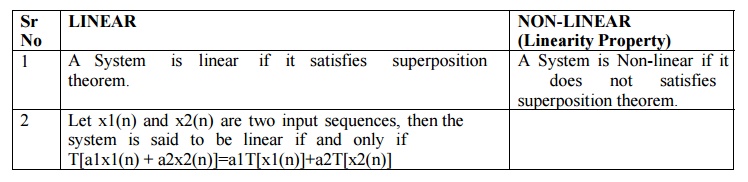
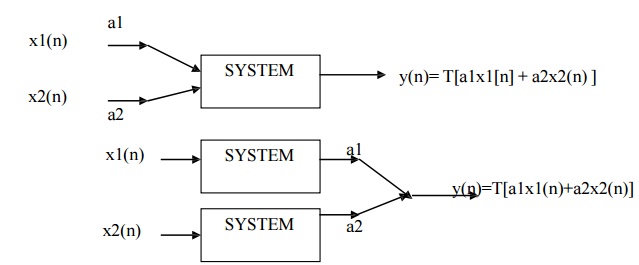
hence T [
a1 x1(n) + a2 x2(n) ] = T [ a1 x1(n) ] + T [ a2 x2(n) ] It is very easy to find
out that given system is Linear or Non-Linear.
Response
to the system to the sum of signal = sum of individual responses of the system.
4) CAUSAL v/s NON CAUSAL SYSTEMS
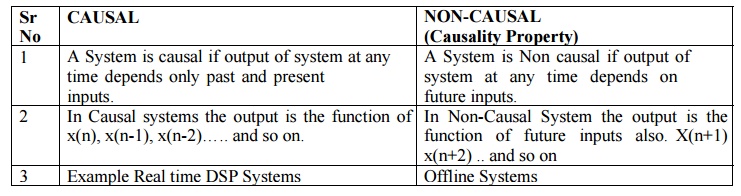
CAUSAL
a)
A System is causal if output of system at any time
depends only past and present inputs.
b)
In Causal systems the output is the function of
x(n), x(n-1), x(n-2)….. and so on.
c)
Example Real time DSP Systems
NON-CAUSAL (Causality Property)
a)
A System is Non causal if output of system at any
time depends on future inputs.
b)
In Non-Causal System the output is the function of
future inputs also. X(n+1) x(n+2) .. and so on
c)
Offline Systems
It is
very easy to find out that given system is causal or non-causal. Just check
that output of the system depends upon present or past inputs only, not
dependent upon future.
Sr No System
[y(n)] Causal /Non-Causal
1 x(n) + x(n-3) Causal
2 X(n) Causal
3 X(n) + x(n+3) Non-Causal
4 2 x(n) Causal
5 X(2n) Non-Causal
6 X(n)+ x(n-2) +x(n+2) Non-Causal
5) STABLE v/s UNSTABLE SYSTEMS
STABLE
a)
A System is BIBO stable if every bounded input
produces a bounded output.
b)
The input x(n) is said to bounded if there exists
some finite number Mx such that |x(n)| ≤ Mx < ∞
The
output y(n) is said to bounded if there exists some finite number My such that
|y(n)| ≤ My < ∞
UNSTABLE (Stability Property)
a)
A System is unstable if any bounded input produces
a unbounded output.
STABILITY FOR LTI SYSTEM
It is
very easy to find out that given system is stable or unstable. Just check that
by providing input signal check that output should not rise to ∞.
The
condition for stability is given by
Sr No System
[y(n)] Stable / Unstable
1 Cos [ x(n) ] Stable
2 x(-n+2) Stable
3 |x(n)| Stable
4 x(n) u(n) Stable
5
X(n) + n x(n+1) Unstable
Related Topics