Chapter: Civil : Construction Planning And Scheduling
Crashing and Time-Cost Tradeoffs
Crashing and Time/Cost Tradeoffs
The previous sections discussed the duration of activities as
either fixed or random numbers with known characteristics. However, activity
durations can often vary depending upon the type and amount of resources that
are applied. Assigning more workers to a particular activity will normally
result in a shorter duration. Greater speed may result in higher costs and
lower quality, however. In this section, we shall consider the impacts of time,
cost and quality tradeoffs in activity durations. In this process, we shall
discuss the procedure of project crashing as described below.
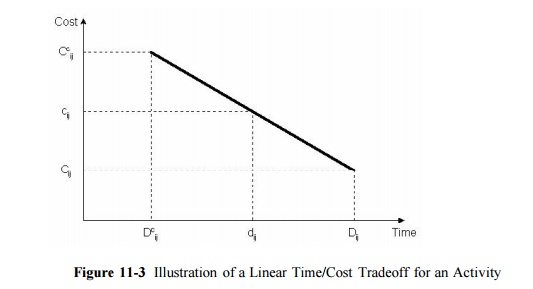
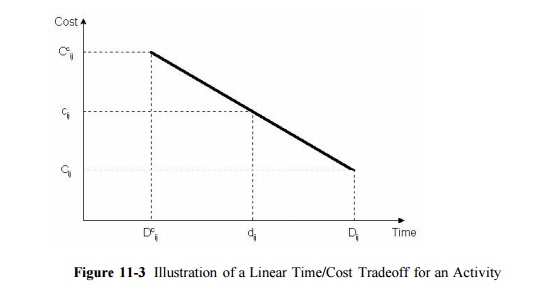
A simple representation of the possible relationship between
the duration of an activity and its direct costs appears in Figure 2-3.
Considering only this activity in isolation and without reference to the
project completion deadline, a manager would undoubtedly choose a duration
which implies minimum direct cost, represented by Dij and Cij
in the figure. Unfortunately, if each activity was
scheduled for the duration that resulted in the minimum direct
cost in this way, the time to complete the entire project might be too long and
substantial penalties associated with the late project start-up might be
incurred. This is a small example of sub-optimization, in which a small
component of a project is optimized or improved to the detriment of the entire
project performance. Avoiding this problem of sub-optimization is a fundamental
concern of project managers.
At the
other extreme, a manager might choose to complete the activity in the minimum
possible time, Dc , but at a higher cost Cc ijij.This
minimum completion time is commonly called the activity crash time. The linear
relationship shown in the figure between these two points implies that any
intermediate duration could also be chosen. It is possible that some
intermediate point may represent the ideal or optimal trade-off between time
and cost for this activity.
What is
the reason for an increase in direct cost as the activity duration is reduced?
A simple case arises in the use of overtime work. By scheduling weekend or
evening work, the completion time for an activity as measured in calendar days
will be reduced. However, premium wages must be paid for such overtime work, so
the cost will increase. Also, overtime work is more prone to accidents and
quality problems that must be corrected, so indirect costs may also increase.
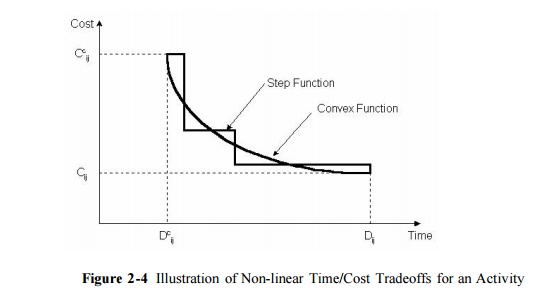
More generally, we might not expect a linear relationship between duration and
direct cost, but some convex function such as the nonlinear curve or the step
function shown in Figure 11-4. A linear function may be a good approximation to
the actual curve, however, and results in considerable analytical simplicity.
With a linear relationship between cost and duration, the
critical path time/cost tradeoff problem can be defined as a linear programming
optimization problem. In particular, let Rij represent the
rate of change of cost as duration is decreased, illustrated
by the absolute value of the slope of the line in Figure 11-3. Then, the direct
cost of completing an activity is:

where the lower case cij and dij represent the scheduled duration and resulting cost of the activity ij. The actual duration of an activity must fall between the minimum cost time (Dij) and the crash time (Dcij). Also, precedence constraints must be imposed as described earlier for each activity. Finally, the required completion time for the project or, alternatively, the costs associated with different completion times must be defined. Thus, the entire scheduling problem is to minimize total cost (equal to the sum of the cij values for all activities) subject to constraints arising from (1) the desired project duration, PD, (2) the minimum and maximum activity duration possibilities, and (3) constraints associated with the precedence or completion times of activities. Algebraically, this is:
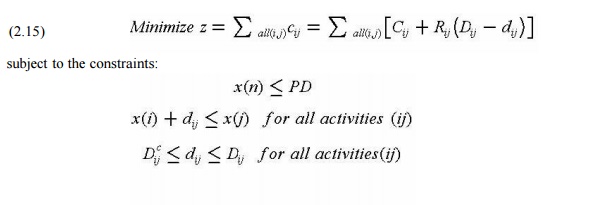
where the
notation is defined above and the decision variables are the activity durations
dij and event
times x(k). The appropriate schedules for different project
durations can be found by repeatedly solving this problem for different project
durations PD. The entire problem can be solved by linear programming or more
efficient algorithms which take advantage of the special network form of the
problem constraints.
One solution to the time-cost tradeoff problem is
of particular interest and deserves mention here. The minimum time to complete
a project is called the project-crash time. This minimum completion time can be
found by applying critical path scheduling with all activity durations set to
their
minimum values (Dcij). This minimum completion time for the project can then be used in
the time-cost scheduling problem described above to determine
the minimum project-crash cost. Note that the project crash cost is not found
by setting each activity to its crash duration and summing up the resulting
costs; this solution is called the all-crash cost. Since there are some
activities not on the critical path that can be assigned longer duration
without delaying the project, it is advantageous to change the all-crash
schedule and thereby reduce costs.
Heuristic approaches are also possible to the
time/cost tradeoff problem. In particular, a simple approach is to first apply
critical path scheduling with all activity durations assumed to be at minimum
cost (Dij). Next, the planner can examine activities on the critical
path and reduce the scheduled duration of activities which
have the lowest resulting increase in costs. In essence, the planner develops a
list of activities on the critical path ranked in accordance with the unit
change in cost for a reduction in the activity duration. The heuristic solution
proceeds by shortening activities in the order of their lowest impact on costs.
As the duration of activities on the shortest path are shortened, the project
duration is also reduced. Eventually, another path becomes critical, and a new
list of activities on the critical path must be prepared. By manual or
automatic adjustments of this kind, good but not necessarily optimal schedules
can be identified. Optimal or best schedules can only be
assured by examining changes in combinations of activities as well as changes
to single activities. However, by alternating between adjustments in particular
activity durations (and their costs) and a
critical path scheduling procedure, a planner can fairly
rapidly devise a shorter schedule to meet a particular project deadline or, in
the worst case, find that the deadline is impossible of accomplishment.
This type of heuristic approach to time-cost
tradeoffs is essential when the time-cost tradeoffs for each activity are not
known in advance or in the case of resource constraints on the project. In
these cases, heuristic explorations may be useful to determine if greater
effort should be spent on estimating time-cost tradeoffs or if additional
resources should be retained for the project. In many cases, the basic
time/cost tradeoff might not be a smooth curve as shown in Figure 11-4, but
only a series of particular resource and schedule combinations which produce
particular durations. For example, a planner might have the option of assigning
either one or two crews to a particular activity; in this case, there are only
two possible durations of interest.
Example
2-4: Time/Cost Trade-offs
The construction of a permanent transit way on an
expressway median illustrates the possibilities for time/cost trade-offs in
construction work. One section of 10 miles of transit way was built in 1985 and
1986 to replace an existing contra- flow lane system (in which one lane in the
expressway was reversed each day to provide additional capacity in the peak
flow direction). Three engineers' estimates for work time were prepared:
z 975 calendar day, based on 750 working days at 5
days/week and 8 hours/day of work plus 30 days for bad weather, weekends and
holidays.
z 702 calendar days, based on 540 working days at 6 days/week
and 10 hours/day of work. z 360 calendar days, based on 7 days/week and 24
hours/day of work.
The savings from early completion due to operating savings in
the contra-flow lane and contract administration costs were estimated to be
$5,000 per day.
In
accepting bids for this construction work, the owner required both a dollar
amount and a completion date. The bidder's completion date was required to fall
between 360 and 540 days. In evaluating contract bids, a $5,000 credit was
allowed for each day less than 540 days that a bidder specified for completion.
In the end, the successful bidder completed the project in 270 days, receiving
a bonus of 5,000*(540-270) = $450,000 in the $8,200,000 contract. However, the
contractor experienced fifteen to thirty percent higher costs to maintain the
continuous work schedule.
Related Topics