Chapter: Civil : Construction Planning And Scheduling
Calculations for Critical Path Scheduling
Calculations
for Critical Path Scheduling
With the background provided by the previous sections, we can
formulate the critical path scheduling mathematically. We shall present an
algorithm or set of instructions for critical path scheduling assuming an
activity-on-branch project network. We also assume that all precedence are of a
finish-to-start nature, so that a succeeding activity cannot start until the
completion of a preceding activity. In a later section, we present a comparable
algorithm for activity-on-node representations with multiple precedence types.
Suppose that our project network has n+1 nodes,
the initial event being 0 and the last event being n. Let the time at which
node events occur be x1, x2,...., xn,
respectively. The start of the project
![]() at x0 will be defined
as time 0. Nodal event times must be consistent with activity durations, so
that
at x0 will be defined
as time 0. Nodal event times must be consistent with activity durations, so
that
an activity's successor node event time must be larger than an
activity's predecessor node event time plus its duration. For an activity
defined as starting from event i and ending at event j, this relationship can
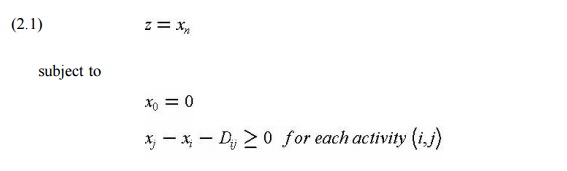
be expressed as the inequality constraint, xj xi + Dij
where Dij is the duration of activity (i,j). This
same expression can be written for every activity
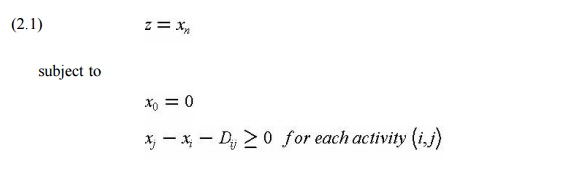
and must hold true in any feasible schedule. Mathematically, then, the critical
path scheduling problem is to minimize the time of project
completion
(xn) subject to the constraints that each node completion event
cannot occur until each of the predecessor activities have been completed:
Minimize
Rather than solving the critical path scheduling
problem with a linear programming algorithm (such as the Simplex method), more
efficient techniques are available that take advantage of the network structure
of the problem. These solution methods are very efficient with respect to the
required computations, so that very large networks can be treated even with
personal computers. These methods also give some very useful information about
possible activity schedules. The programs can compute the earliest and latest
possible starting times for each activity which are consistent with completing
the project in the shortest possible time. This calculation is of particular
interest for activities which are not on the critical path (or paths), since
these activities might be slightly delayed or re-scheduled over time as a
manager desires without delaying the entire project.
An efficient solution process for critical path
scheduling based upon node labeling is shown in Table 2-1. Three algorithms
appear in the table. The event numbering algorithm numbers the nodes (or
events) of the project such that the beginning event has a lower number than the
ending event for each activity. Technically, this algorithm accomplishes a
"topological sort" of the activities. The project start node is given
number 0. As long as the project activities fulfill the conditions for an
activity-on-branch network, this type of numbering system is always possible.
Some software packages for critical path scheduling do not have this numbering
algorithm programmed, so that the construction project planners must insure
that appropriate numbering is done.
The
earliest event time algorithm computes the earliest possible time, E(i), at
which each event, i, in the network can occur. Earliest event times are
computed as the maximum of the earliest start times plus activity durations for
each of the activities immediately preceding an event. The earliest start time
for each activity (i,j) is equal to the earliest possible time for the
preceding event E(i):
Activities are identified in this algorithm by the predecessor
node (or event) i and the successor node j. The algorithm simply requires that
each event in the network should be examined in turn beginning with the project
start (node 0).
The latest event time algorithm computes the
latest possible time, L(j), at which each event j in the network can occur,
given the desired completion time of the project, L(n) for the last event n.
Usually, the desired completion time will be equal to the earliest possible
completion time, so that E(n) = L(n) for the final node n. The procedure for
finding the latest event time is analogous to that for the earliest event time
except that the procedure begins with the final event and works backwards
through the project activities. Thus, the earliest event time algorithm is
often called a forward pass through the network, whereas the latest event time
algorithm is the the backward pass through the network. The latest finish time
consistent with completion of the project in the desired time frame of L(n) for
each activity (i,j) is equal to the latest possible time L(j) for the
succeeding event:
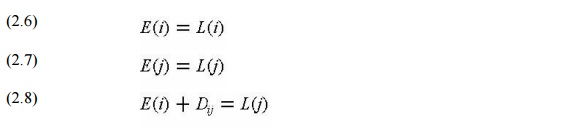
Hence, activities between critical events are also on a
critical path as long as the activity's earliest start time equals its latest
start time, ES(i,j) = LS(i,j). To avoid delaying the project, all the
activities on a critical path should begin as soon as possible, so each
critical activity (i,j) must be scheduled to begin at the earliest possible
start time, E(i).
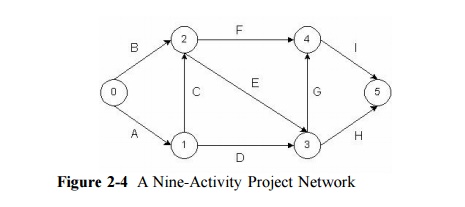
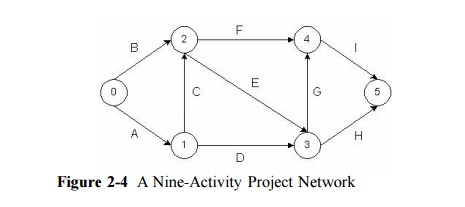
Example 2
-2: Critical path scheduling calculations
Consider
the network shown in Figure 2-4 in which the project start is given number 0.
Then, the only event that has each predecessor numbered is the successor to
activity A, so it receives number 1. After this, the only event that has each
predecessor numbered is the successor to the two activities B and C, so it
receives number 2. The other event numbers resulting from the algorithm are
also shown in the figure. For this simple project network, each stage in the
numbering process found only one possible event to number at any time.
With more
than one feasible event to number, the choice of which to number next is
arbitrary. For example, if activity C did not exist in the project for Figure
10-4, the successor event for activity A or for activity B could have been
numbered 1.
Once the
node numbers are established, a good aid for manual scheduling is to draw a
small rectangle near each node with two possible entries. The left hand side
would contain the earliest time the event could occur, whereas the right hand
side would contain the latest time the event could occur without delaying the
entire project.
Related Topics