Chapter: Mechanical : Robotics : Fundamentals of Robot
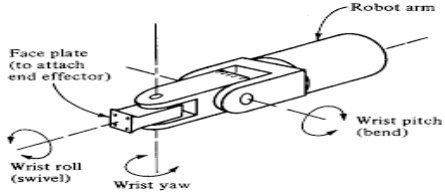
Wrist configuration of Robot
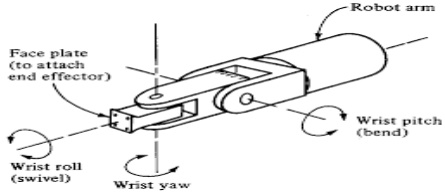
Wrist configuration
Roll-
This
is also called wrist swivel, this involves rotation of the wrist mechanism
about the arm axis.
Pitch- It
involves up & down rotation of the wrist. This is also called as wrist
bend.
Yaw- It
involves right or left rotation of the wrist.
Notation TRL:
ƒ
Consists of a sliding armbody,which(Lcan joint)rotateaboutboth actuat vertical
axis (T joint) and horizontal axis (R joint)
Notation TLO:
ƒConsists
of a vertical column, relative to which an arm assembly is moved up or down ƒthe
arm can be moved in or out relative to the column
Notation LOO:
ƒ
Consistsiding joints,of twothreeofwhich areslorthogonal Other names include
rectilinear robot and x-y-z robot.
Robots are devices that are programmed to move
parts, or to do work with a tool. Robotics is a multidisciplinary engineering
field dedicated to the development of autonomous devices, including
manipulators and mobile vehicles.
Roboticists develop man-made mechanical devices that
can move by themselves, whose motion must be modelled, planned, sensed,
actuated and controlled, and whose motion
behaviour
can be influenced by nt”“programming”iftheys in moving in safe interaction with
an unstructured environment, while autonomously achieving their specified
tasks.
This definition implies that a device c movable
mechanism, influenced by sensing, planning, actuation and control components.
It does not imply that a minimum number of these components must be implemented
in software, or be changeable by the “consumer” who uses can have been
hard-wired into the device by the manufacturer.
Related Topics