Chapter: Mechanical : Robotics : Fundamentals of Robot
Robot Parts and Functions
Robot Parts and Functions
The controller is the "brain" of the industrial
robotic arm and allows the parts of the robot to operate together. It works as
a computer and allows the robot to also be connected to other systems. The robotic arm controller runs a set of
instructions written in code called a program. The program is inputted
with ateach pendant. Many of
today's industrial robot arms use an
interface that resembles or is built on the Windows operating system.
Industrial robot arms
can vary in size and shape. The industrial
robot arm is the part that positions the end effector. With the robot arm, the shoulder, elbow, and wrist
move and twist to position the end effector in the exact right spot. Each of
these joints gives the robot another degree of freedom. A simple robot with
three degrees of freedom can move in three ways: up & down, left &
right, and forward & backward. Many
industrial robots in factories today are six axis robots.
The end effector
connects to the robot's arm and functions as a hand. This part comes in direct
contact with the material the robot is manipulating. Some variations of an
effector are a gripper, a vacuum pump, magnets, and welding torches. Some robots are capable of
changing end effectors and can be programmed for different sets of tasks.
The drive is the
engine or motor that moves the links into their designated positions. The links
are the sections between the joints. Industrial
robot arms generally use one of the following types of drives: hydraulic,
electric, or pneumatic. Hydraulic drive systems give a robot great speed and
strength. An electric system provides a robot with less speed and strength.
Pneumatic drive systems are used for smaller robots that have fewer axes of
movement. Drives should be periodically inspected for wear and replaced if
necessary.
Sensors allow the
industrial robotic arm to receive feedback about its environment. Theycan give
the robot a limited sense of sight and sound. The sensor collects information
and sends it electronically to the robot controlled. One use of these sensors
is to keep two robots that work closely together from bumping into each other.
Sensors can also assist end effectors by
adjusting for part variances. Vision sensors allow a pick and place robot to differentiate between
items to choose and items to ignore.
Controller:
Every robot is
connected to a computer, which keeps the pieces of the arm working together.
This computer is known as the controller.
The controller
functions as the "brain"of the robot. The controller also allows the
robot to be networked to other systems, so that it may work together with other
machines, processes, or robots.
Robots today have controllers that are run by
programs - sets of instructions written in code. Almost all robots of today are
entirely pre-programmed by people; they can do only what they are programmed to
do at the time, and nothing else. In the future, controllers with artificial
intelligence, or AI could allow robots to think on their own, even program
themselves. This could make robots more self-reliant and independent.
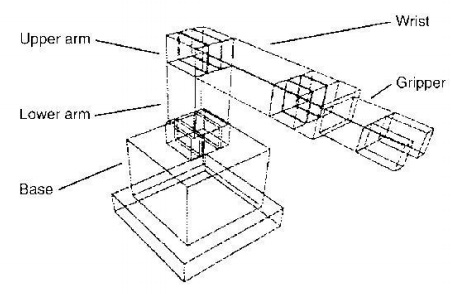
Arm:
Robot arms come in all
shapes and sizes. The arm is the part of the robot that positions the end-
effector and sensors to do their pre-programmed business. Many (but not all)
resemble human arms, and have shoulders, elbows, wrists, even fingers.
This gives the robot a
lot of ways to position itself in its environment. Each joint is said to give
the robot 1 degree of freedom. So, a simple robot arm with 3 degrees of freedom
could move in 3 ways: up and down, left and right, forward and backward.
Drive:
The drive is the
"engine" that drives the links (the sections between the joints into
their desired position. Without a drive, a robot would just sit there, which is
not often helpful. Most drives are powered by air, water pressure, or electricity.
End-Effector:
The end-effector is the
"hand" connected to the robot's arm. It is often different from a
human hand - it could be a tool such as a gripper, a vacuum pump, tweezers,
scalpel, blowtorch - just about anything that helps it do its job. Some robots
can change end-effectors, and be reprogrammed for a different set of tasks.
Sensor:
Most robots of today are nearly deaf and blind.
Sensors can provide some limited feedback to the robot so it can do its job.
Compared to the senses
and abilities of even the simplest living things, robots have a very long way
to go.
The sensor sends information, in the form of electronic signals back to the controller. Sensors also give the robot controller information about its surroundings and let it know the exact position of the arm, or the state of the world around it.
Related Topics