Chapter: Mechanical : Robotics : Fundamentals of Robot
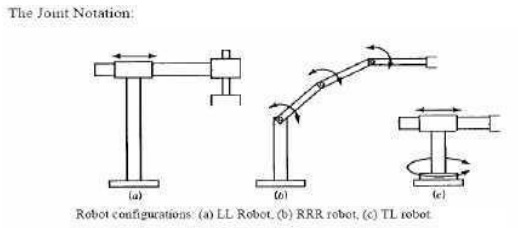
Joint Notation Scheme
Joint Notation Scheme
A robot joint is a mechanism that
permits relative movement between parts of a robot arm. The joints of a robot
are designed to enable the robot to move its end-effector along a path from one
position to another as desired.
The
basic movements required for a desired motion of most industrial robots are:
1.
Rotational movement: This enables the
robot to place its arm in any direction on a horizontal plane.
2.
Radial movement: This enables the robot
to move its end-effector radially to reach distant points.
3.
Vertical movement: This enables the
robot to take its end-effector to different heights.
4.
These degrees of freedom, independently
or in combination with others, define the complete motion of the end-effectors.
These motions are accomplished by
movements of individual joints of the robot arm. The joint movements are
basically the same as relative motion of adjoining links. Depending on the
nature of this relative motion, the joints are classified as prismatic or
revolute.
Prismatic joints
are also known
as sliding as
well as linear
joints. They are
called prismatic because the
cross section of the joint is considered as a generalized prism. They permit
links to move in a linear relationship.
Revolute joints permit only angular motion between
links. Their variations include:
Rotational joint (R)
Twisting
joint (T)
Revolving
joint (V)
In a prismatic joint, also known as a
sliding or linear joint (L), the links are generally parallel to one another.
In some cases, adjoining links are perpendicular but one link slides at the end
of the other link.
The joint motion is defined by sliding or
translational movements of the links. The orientation of the links remains the
same after the joint movement, but the lengths of the links are altered.
A rotational joint (R) is
identified by its motion, rotation about an axis perpendicular to the
adjoining links. Here, the lengths of adjoining links do not change but the
relative position of the links with respect to one another changes as the
rotation takes place.
A twisting joint (T) is
also a rotational joint, where the rotation takes place about an axis that
is parallel to both adjoining links.
A revolving joint (V) is
another rotational joint, where the rotation takes place about an axis
that is parallel to one of the adjoining links. Usually, the links are aligned
perpendicular to one another at this kind of joint. The rotation involves
revolution of one link about another.
Related Topics