Chapter: Special Electrical Machines : Stepping Motor
Torque-Speed Characteristics - stepper motor
TORQUE-SPEED CHARACTERISTICS
Torque
developed by the stepper motor and stepping rate characteristics for both modes
of operation are shown in fig.2.36.the curve ABC represents the "pull
in" characteristics and the curve ADE represents the "pull-out"
characteristics.
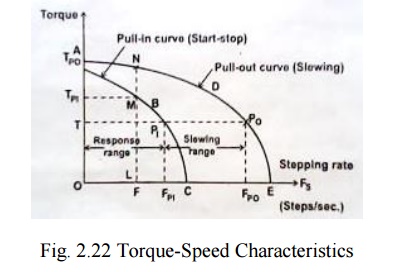
The area
OABCO represents the region for start stop mode of operation. At any operating
point in the region the motor can start and stop without losing synchronism. The
area ABCEDA refers to the region for slewing mode of operation. At any
operating point without losing synchronism to attain an operating point in the
slewing mode at first the motor is to operate at a point in the start-stop mode
and then stepping rate is increased to operate in slewing mode, similarly while
switching off it is essential to operate the motor from slewing mode to
start-stop mode before it is stopped.
Pull in torque
It is the
maximum torque developed by the stepper motor for a given stepping rate in the
start-stop mode of operation without losing synchronism. In the fig.2.36 LM
represents the pull in torque (i.e)TPI corresponding to the stepping rate F
(i.e.) OL.
Pull out torque
It is the
maximum torque developed by the stepper motor for a given stepping rate in the
slewing mode without losing synchronism. In fig.2.36 LN represents the pull in
torque (i.e.) TPO corresponding to F (i.e.) OL.
Pull in range
It is the
maximum stepping rate at which the stepper motor can operate in start-stop mode
developing a specific torque (without losing synchronism).In fig. 2.36 PIT
represents pull in range for a torque of T (i.e.) OP. This range is also known
as response range of stepping rate for the given torque T.
Pull out range
It is the
maximum stepping rate at which the stepper motor can operate in slewing mode
developing a specified torque without losing synchronism. In fig.2.36 PIPO
represents the pull out range for a torque of T. The range PIPO is known
slewing range.
Pull in rate (FPI)
It is the
maximum stepping rate at which the stepper motor will start or stop without
losing synchronism against a given load torque T.
Pull out rate (FPO)
It is the
maximum stepping rate at which the stepper motor will slew, without missing
steps, against load torque T.
Synchronism
This term
means one to one correspondence between the number of pulses applied to the
stepper motor and the number of steps through which the motor has actually
moved.
Mid frequency resonance
The
phenomenon at which the motor torque drops to a low value at certain input
pulse frequencies.
Related Topics