Chapter: Special Electrical Machines : Stepping Motor
Multistack Variable Reluctance Stepper Motor
MULTISTACK VARIABLE RELUCTANCE
STEPPER MOTOR
These are
used to obtain smaller step sizes, typically in the range of 2° to 15°.
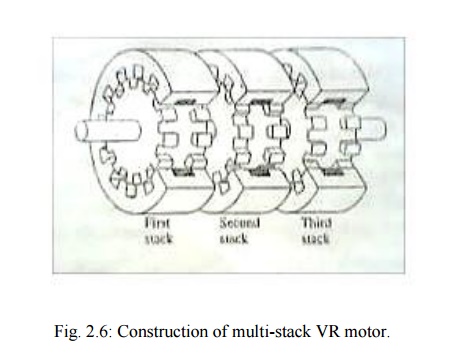
Although three stacks are common a multistack motor may employ as many as seven
stacks. This type is also known as the cascade type. A cutaway view of a three
stack motor is shown in fig. 2.6.
A
multistack (or m-stack) variable reluctance stepper motor can be considered to
be made up of ‘m‘ identical single stack variable reluctance motors with their
rotors mounted on a single shaft. The stators and rotors have the same number
of poles (or teeth) and therefore same pole (tooth) pitch. For a m0stack motor,
the stator poles (or teeth) in all m stacks are aligned, but the rotor poles
(teeth) are displaced by 1/m of the pole pitch angle from one another. All the
stator pole windings in a given stack are exited simultaneously and, therefore
the stator winding of each stack forms one phase. Thus the motor has the same
number of phases as number of stacks.
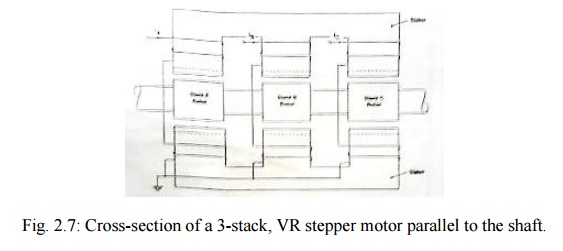
Figure
2.7 shows the cross section of a three stack (3-phase) motor parallel to the
shaft. In each stack, stator and rotors have 12 poles (teeth). For a 12 pole
rotor, pole pitch is 30° and therefore, the rotor poles (teeth) are displaced
from each other by 1/3rd of the pole pitch or 10°. The stator teeth in each
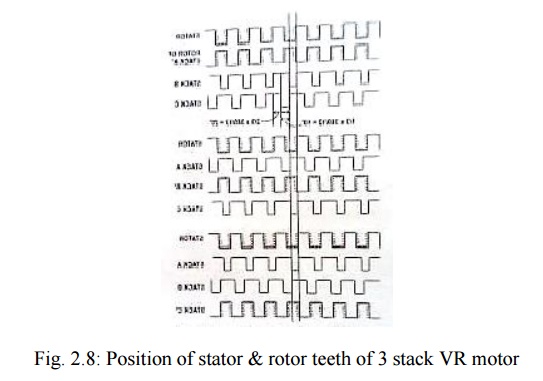
stack are aligned. When the phase winding A is excited rotor teeth of stack A
are aligned with the stator teeth as shown in fig. 2.8.
When
phase A is de-energized and phase B is excited the rotor teeth of stack B are
aligned with stator teeth. The new alignment is made by the rotor movement of
10° in the anticlockwise direction. Thus the motor moves one step (equal to ½
pole pitch) due to change of excitation from stack A to stack B
Next
phase B is de-energized and phase C is excited. The rotor moves by another step
1/3rd of pole pitch in the anticlockwise direction. Another change of
excitation from stack C to stack A will once more align the stator and rotor
teeth in stack A. however during this process (A → B → C → A) the rotor has
moved one rotor tooth pitch.
Let Nr be
the number of rotor teeth and ‗m‘ the number of stacks or phases, then
Tooth
pitch Tp= 360/Nr ……………… (2.1)
Step
Angle α= 360°/mNr ………………. (2.2)
Related Topics