Chapter: Special Electrical Machines : Stepping Motor
Linear And Non Linear Analysis - stepper motor
LINEAR AND NON LINEAR ANALYSIS
The
linear and nonlinear analysis of the motor performance with respect to the
torque produced by the rotor of the motor is explained.
Let
Tm be the
motor torque produced by the rotor in Nm
J be the
inertia of the rotor and load combination in kgm2
ω be the
angular velocity of the rotor
D be the
damping coefficient or viscous frictional coefficient
Tf be the frictional load torque independent of
the speed
Θs be the
step angle in radians
F be the
stepping rate in steps/sec or pps
Frictional
load torque Tf = K θ
According
to rotor dynamics
Tm=―J*dω/dt+Dω+Tf ………….. (2.30)
Also
θs=θ=ωt=step angle
ω=θs/t=f
θs …………..(2.31)
where
f=1/t ………….(2.32)
By
putting ω=f θs
Tm=J
*d/dt(f θs )+D(f θs )+Tf …………..(2.33)
θs=360/mNr
is fixed for a particular type of motor
S o θs
can be considered as constant
Therefore
Tm=J θs* d/dt(f)+D θs(f)+Tf ………….(2.34)
In
equation 2.47 if viscous friction constant is neglected the equation will be a
linear equation, the corresponding acceleration will be nonlinear and the
equation will be nonlinear which given rise to nonlinear analysis.
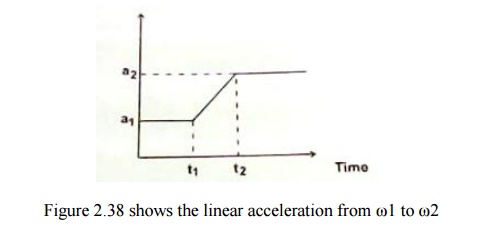
Linear
acceleration on linear analysis
If the
damping coefficient is neglected D=0
The
expression for motor torque becomes
Tm=―J*dω/dt+Tf ………………(2.35)
Tm-Tf=
J*dω/dt
(Tm-Tf)/J= dω/dt
dω=((Tm-Tf)/J)dt ………………..
(2.36)
Integrating
ω=((Tm-Tf)/J)dt+ω1 ……………….. (2.37)
Where
ω1=Integration
constant
Mathematically
ω1 is the constant of integration but it indicates the initial angular velocity
of the motor before the occurrence of acceleration.
Therefore
ω=θs f and ω1= θs f1
Substituting ω and ω1 in equation 2.50
((Tm-Tf)/J)t+
θs f1= θsf ………………..(2.38)
Dividing
throughout by θs we get
((Tm-Tf)/J
θs)t+ f1=f
Therefore
stepping rate f=((Tm-Tf)/J θs)t+ f1 ……………(2.39)
And Tf =
K θ
Nonlinear
(exponential) acceleration on Nonlinear analysis
Considering
the torque produced by the motor
Tm=jθs
df/dt +Dθsf+Tf …….(2.40)
(Tm-Tf)=
jθs df/dt +Dθsf
Dividing
throughout by jθs We get
(df/dt)+(D/J)f-(Tm-Tf
/j θs )=0
(or)
(df/dt)+(D/J)f=(Tm-Tf /j θs ) ….
(2.41)
The above
eqn. 2.54 is of the form
(dy/dx)+py=Q
Which have the solution of
ye∫pdx
=∫Q e∫pdx+C …..………….(2.42 )
Here y=f;
x=t; p=(D/j) and Q=(Tm-Tf)/jθs =constant
fe∫D/J
dt=∫(Tm-Tf)/jθse∫D/J dt+C …………………(2.43)
fe∫D/J
t=∫(Tm-Tf)/jθse∫D/J t+C ………….…….(2.44)
fe∫D/J
t=(Tm-Tf)/jθs(e∫D/J t/(D/J))+C ………………..(2.45)
where C
is the integration constant
To find C
substituting initial condition at t=0; f=f(0)=f1f1e0==(Tm-
Tf)/jθs(1/(D/J))+C …………..…..(2.46)
f1===(Tm-Tf)/Jθs(J/D))+C
…………..…...(2.47)
f1=(Tm-Tf)/Dθs+C
………….…..(2.48)
C=
f1-(Tm-Tf)/Dθs .
……………...(2.49)
Substituting
eqn. (2.62) in eqn. (2.58)
f
e(D/J)t=(Tm-Tf)/Jθs(J/D)e(D/J)t+( f1-(Tm-Tf)/Dθs) …………….….(2.50)
f
e(D/J)t=(Tm-Tf)/Dθs e(D/J)t+( f1-(Tm-Tf)/Dθs) ………..……(
2.51)
Dividing
throughout by e(D/J)t we get
F=Tm-Tf/Dθs +(f1-Tm-Tf/Dθs)e-D/j
t ……………(2.52)
Stepping
frequency f= Tm-Tf/Dθs +(f1-Tm-Tf/Dθs)e-D/j
t
The above
equation is a nonlinear exponential equation which gives rise to nonlinear
acceleration of the rotor of the motor.
Related Topics