Chapter: Special Electrical Machines : Stepping Motor
Micro Stepping Control of Stepping Motor
MICRO
STEPPING CONTROL OF STEPPING MOTOR
Stepping
motor is a digital actuator which moves in steps of θs in response to input
pulses. such incremental motion results in the following limitations of the
stepper motor
Limited resolution
As θs is
the smallest angle through which the stepper motor can move, this has an effect
on position accuracy of incremental servo system employing stepper motors
because the stepper motor cannot position the load to an accuracy finer than
θs.
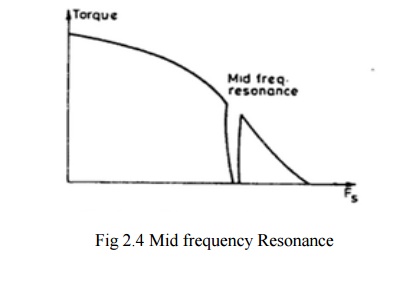
Mid frequency Resonance
A phenomenon in which the motor torque suddenly drops to a low value at certain pulse frequencies as in fig
A new
principal known as micro
stepping control has
been developed with
a view of overcoming the above limitation .It
enables the stepping motor to move through a tiny micro step of size ∆ θs
<< θs full step angle is response
to input pulses.
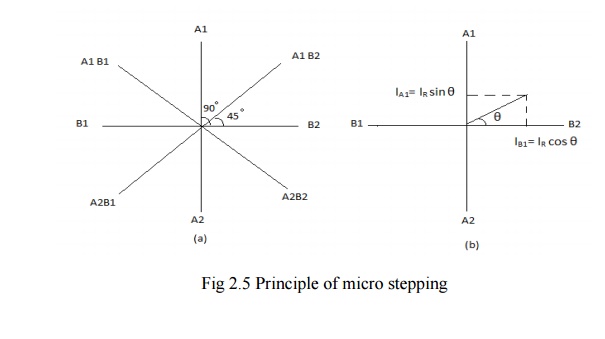
1. Principle of micro stepping
Assume a
two phase stepper motor operating in ‗one phase ON‘ sequence. Assume also that
only B2 winding is On and carrying current IB2 = IR, the rated phase current.
All the other winding are OFF. In this state the stator magnetic field is along
the positive real axis as show in fig (a). Naturally the rotor will also as be
in θ = 0° position.
When the
next input pulse comes, B2 is switched OFF while A1 is switched ON.In this
condition IA1= IR while all the phase current are zero. As a result the stator
magnetic field rotates through 90® in counter clockwise direction as show in
fig (a).
The rotor
follows suit by rotating through 90° in the process of aligning itself with
stator magnetic field. Thus with a conventional controller the stator magnetic
field rotates through 90° when a new input pulse is received causing the rotor
to rotate full step.
However
in micro stepping we want the stator magnetic field to rote through a small
angle θs << 90° in respect to input pulse. This is achieved by modulating
the current through
B2 and A1
winding as show in fig (b) such that
IA1= IR
sin θ
IB1= IR
cos θ
Then the
resulting stator magnetic field will be at an angle θ ° with respect to the
positive real axis. consequently the rotor will rotate through an angle θs
<< 90° .
This
method of modulating current through stator winding so as to obtain rotation of
stator magnetic field through a small angle θ °
Related Topics