Chapter: Special Electrical Machines : Stepping Motor
Hybrid stepper motor
Hybrid stepper motor
Principle of operation
Most
widely used hybrid motor is the two phase type as shown in fig2.11. This model
has four poles and operates on one phase on excitation.
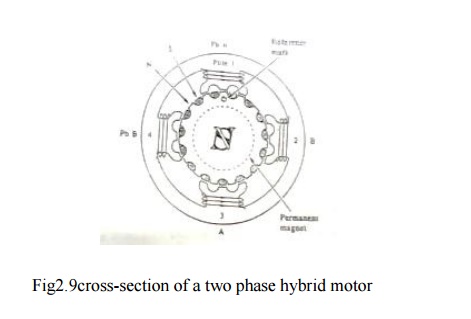
The coil
in pole 1 and that in pole 3 are connected in series consisting of phase A, and
pole 2 and 4 are for phase B. Fig 2.12 shows the proce3ss of rotor journey as
the winding currents are switched in one phase ON excitation.
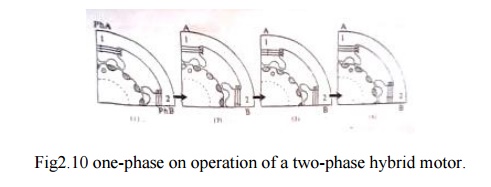
The poles
of phase A are excited the teeth of pole 1 attract some of the rotors north
poles, while the teeth of pole 3 align with rotor‘s south poles. Current is
then switched to phase B, The rotor will travel a quarter tooth pitch so that
tooth alignment takes place in 2 and 4.
Next
current is switched back to phase A but in opposite polarity to before, the
rotor will make another quarter tooth journey. The tooth alignment occurs in
opposite magnetic polarity to state 1. When current is switched to phase B in
opposite polarity (4) Occurs as a result of quarter tooth pitch journey.
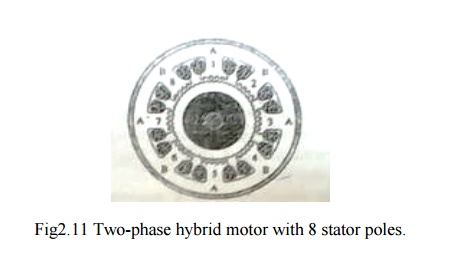
The
structures of two phase motor considered in fig.2.11 will not produce force in
a symmetrical manner with respect to the axis. The motor having 8 poles in the
stator shown in fig2.13 considered as the structure in which torque is
generated at a symmetrical position on the surface.
Related Topics