Chapter: Special Electrical Machines : Stepping Motor
Terminologies Used in Stepper Motor
TERMINOLOGIES USED IN STEPPER
MOTOR
1. Step
motor
2. Resolution
3. Stepping
rate
4. Hold
position
5. Detent
position
6. Stepping
error
7. Position
Error
1. Step angle (θs or β)
It is the
angular displacement of rotor of a stepper motor for every pulse of excitation
given to the stator winding of the motor. it is determined by the number of
teeth on the rotor and stator, as well as the number of steps in the
energisation sequence. It is given by
Where
m =
Number of phases (m and q)
Nr-
number of teeth on rotor.
Also, Θs=((Ns~Nr)/(Ns.Nr))*360
2. Resolution
It is the
number of steps per revolution. It is denoted as S or Z. it is given by
Z=360/(Θs)
For
variable reluctance motor Z=(q Nr) or (m Nr)
For PM
motor and hybrid motor Z=2q Nr
Also , Z=(Ns.Nr)/(Ns~Nr)
Where
Ns-number of teeth/poles on stator.
3. Stepping Rate
The
number of steps per second is known as stepping rate or stepping frequency.
4. Hold Position
It
corresponds to the rest position when the stepper motor is excited or
energized(this corresponds to align position of VR motor)
5. Detent Position
It
corresponds to rest position of the motor when it is not excited.
6. Stepping Error
Actual
step angle is slightly different from the theoretical step angle. This is
mainly due to tolerances in the manufacture of stepper motor and the properties
of the magnetic and other materials used.
The error
in the step angle is expressed as a percentage of the theoretical step angle.
%error=
((step angle – theoretical step angle)/theoretical step angle)*100
Percentage
error is restricted to ± 5%.In some cases it is restricted to ±2%. The
cumulative error between the actual angular displacement and theoretical
angular displacement is expressed as a percentage of theoretical angular
displacement. It is usually considered for one complete cycle.
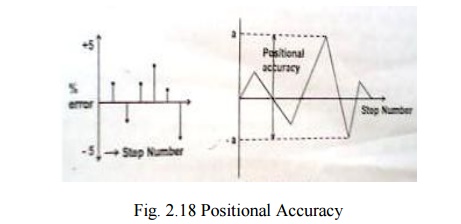
7. Positional Error
The
maximum range of cumulative percentage of error taken over a complete rotation
of stepper motor is referred to as positional accuracy as shown in fig below.
Related Topics