Chapter: Electrical machines : Synchronous Generator
Prime-mover Governor Characteristic
Prime-mover Governor Characteristic
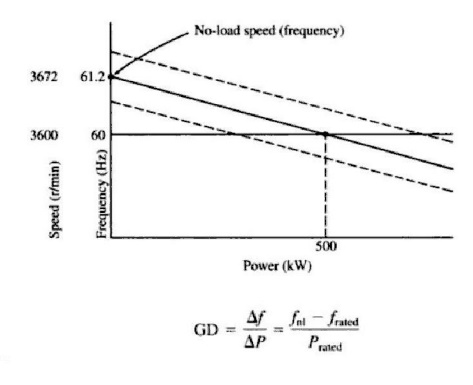
The transfer of active power between alternators in parallel is accomplished by adjustment of the no-load speed setting of the respective prime-mover governors, and the transfer of reactive power is accomplished by adjustment of the respective field rheostats or voltage regulators. A typical prime-mover governor characteristic, shown in Fig: , is a plot of prime-mover speed (or generator frequency) vs. active power. Although usually drawn as a straight line, the actual characteristic has a slight curve. The drooping characteristic shown in the figure provides inherent stability of operation when paralleled with other machines. Machines with zero droop, called isochronous machines, are inherently unstable when operated in parallel; they are subject to unexpected load swings, unless electrically controlled with solid-state regulators.
The no-load speed setting (and hence the no-load frequency setting) of a synchronous generator can be changed by remote control from the generator panel by using a remote-control switch. The switch actuates a servomotor that repositions the no-load speed setting of the governor, raising or lowering the characteristic without changing its slope. Curves for different no-load speed settings are shown with broken lines in Figure
Governor Speed Regulation
Governor speed regulation (GSR) is defined as:
Related Topics