Chapter: Operations Research: An Introduction : Network Models
Linear Programming Formulation of the Shortest-Route Problem
Linear Programming Formulation of the Shortest-Route Problem
This
section provides an LP model for the shortest-route problem. The model is
gen-eral in the sense that it can be used to find the shortest route between
any two nodes in the network. In this regard, it is equivalent to Floyd's
algorithm.
Suppose
that the shortest-route network includes n
nodes and that we desire to determine the shortest route between any two nodes
sand t in the network. The LP assumes
that one unit of flow enters the network at node s and leaves at node t.
Define
Example 6.3-6
Consider
the shortest-route network of Example 6.3-4. Suppose that we want to determine
the shortest route from node 1 to node 2-that is, s = 1 and t = 2.
Figure 6.24 shows how the unit of flow enters at node 1 and leaves at node 2.
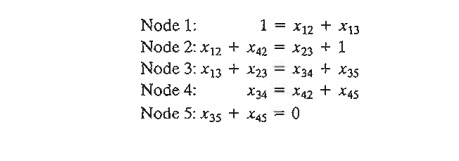
We can
see from the network that the flow-conservation equation yields
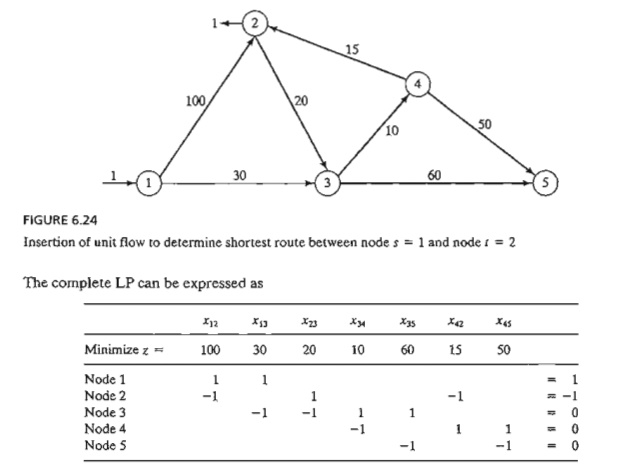
Notice
that column xij has exactly one "1"
entry in row i and one "-I" entry in row j, a
typical property of a network LP.
The
optimal solution (obtained by TORA, file toraEx6.3-6.txt) is

This
solution gives the shortest route from node 1 to node 2 as 1 -> 3-> 4 -> 2, and
the associated distance is z = 55
(miles).
PROBLEM
6.30
1. In
Example 6.3-6, use LP to determine the shortest routes between the following
pairs of nodes:
*(a) Node
1 to node 5.
(b) Node
2 to node 5.
Solver
Moment
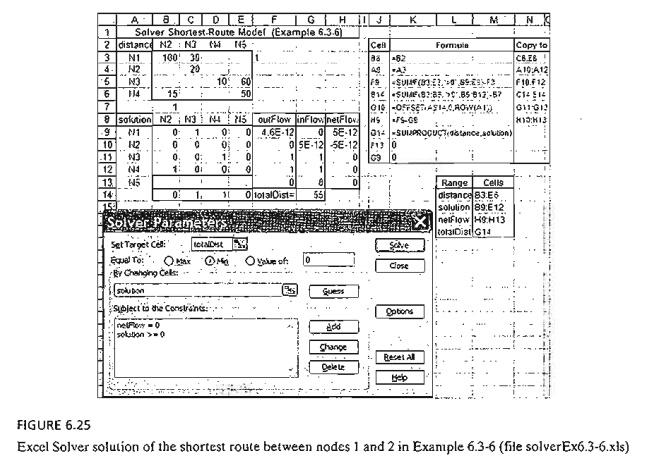
Figure
6.25 provides the Excel Solver spreadsheet for finding the shortest route
between start node Nl and end node N2 of Example 6.3-6 (file
solverEx6.3-6.xls). The input data of the model is the distance matrix in cells
B3:E6. Node Nl has no column because it has no incoming arcs, and node N5 has
no row because it has no outgoing arcs. A blank entry means that the
corresponding arc does not exist. Nodes Nl and N2 are designated as the start and end nodes by entering 1 in F3 and B7, respectively. These
designations can be changed simply by moving the entry 1 to new cells. For
example, to fmd the shortest route from node N2 to node N4, we enter 1 in each
of F4 and D7.
The
solution of the model is given cells B9:E12. A cell defines a leg connecting
its designated nodes. For example, cell C10 defines the leg (N2, N3), and its
associated variable is x23. A cell
variable xij = 1 if its leg (Ni, Nj) is on the
route. Otherwise, its value is zero.
With the
distance matrix given by the range B3:E6 (named distance) and the solution matrix given by the range B9:E12 (named solution), the objective function is
computed in cell G14 as =SUMPRODUCT(B3: E6,B9: E12) or, equivalently, =SUMPRODUT
(distance, solution). You may wonder about the significance of the blank
entries (which default to zero by Excel) in the distance matrix and their
impact on the definition of the objective function. This point will be
addressed shortly, after we have shown how the corresponding variables are
totally excluded from the constraints of the problem.
As
explained in the LP
of Example 6.3-6, the constraints of the problem are of the general form:
(Output
flow) - (Input flow) = 0
This
definition is adapted to the spreadsheet layout by incorporating the external
unit flow, if any, directly in either Output
flow or Input flow of the
equation. For example, in Example 6.3-6, an external flow unit enters at Nl and
leaves at N2. Thus, the associated constraints are given as
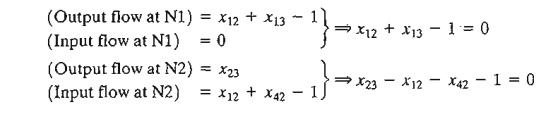
Looking
at the spreadsheet in Figure 6.25, the two constraints are expressed in terms
of the cells as
(Output
flow at Nl)=B9+C9-F3
(Input
flow at Nl) =0
(Output
flow at N2)=CIO
(Input
flow at N2) =89+812-B7
To
identify the solution cells in the range B9:E12 that apply to each constraint,
we note that a solution cell forms part of a constraint only if it has a
positive entry in the distance matrix. Thus, we use the following formulas to
identify the output and input flows for each node:
1. Output flow: Enter=SUMIF (83; E3)
">0" ,
B9: E9) -F3 in cell F9 and copy
it in cells F10:F12.
2. Input
Flow: Enter=sUMIF (B3 ; B6 , ">0" , 89 :
812) -87 in cell B14
and copy it in cells
CI4:EI4.
3. Enter
=OFFSET (A$14, 0,I ROW (AI) ) in cell GI0 and copy
it in cells Gl1:G13 to transpose the input flow to column G.
4. Enter
0 in each of G9 and F13 to indicate that Nl has no input flow and N5 has no
output flow (per spreadsheet definitions).
5. Enter
=F9-G9 in cell H9 and copy it in cells HIO:H13 to compute the net flow.
The
spreadsheet is now ready for the application of Solver as shown in Figure 6.25.
There is one curious occurrence though: When you define the constraints within
the Solver Parameters dialogue box as outFlow
= inFlow, Solver does not locate a feasi-ble solution, even after
making adjustments in precision in
the Solver Option box. (To reproduce
this experience, solution cells
B9:E12 must be reset to zero or blank.) More curious yet, if the constraints
are replaced with inFlow = outFlow, the optimum solu-tion is found.
In file solverEx6.3-6.xls, we use the nefFlow
range in cells H9:Hl2 and express the constraint as netFlow = 0 with
no problem. It is not clear why this pecu-liarity occurs, but the problem could
be related to roundoff error.
The
output in Figure 6.25 yields the solution (NI-N3 = 1, N3-N4 = 1, N4-N2 = 1) with a total distance of 55
miles. This means that the optimal route is 1 -> 3 ->
4 -> 2.
Remarks. In most textbooks, the network is
defined by its explicit arcs (node i, node j, distance ), a lengthy and
inconvenient process that may not be practical when the number of arcs is large. Our
model is driven primarily by the compact distance matrix, which is all we need
to develop the flow constraints. It may be
argued that our model deals with (n -
1 X n - 1 )xij-variables, which could be much larger than
the number of variables associated with the arcs of the model (for instance,
Example 6.3-6 has 7 arcs and hence 7 xij- variables, as opposed to 4
X 4 = 16 in
our formulation). Keep in mind that these additional variables appear only in
the objective function and with zero coefficients (blank
entries) and that the flow constraints are exactly
the same as in other presentations (per the SUMIF function). As a result, pre-solvers in commercial
software will spot this "oddity" and automatically exclude the
additional variables prior to ap-plying the simplex method, with no appreciable
computational overhead.
AMPLMoment
Figure
6.26 provides the AMPL model for solving Example 6.3-6 (file ampIEx6.3-6a.txt).
The variable x [i, j] assumes the value 1 if arc [i, j] is on the shortest
route and 0
otherwise. The model is general in the sense that it can be used to find the shortest route between any
two nodes in a problem of any size.
As
explained in Example 6.3-6, AMPL treats the problem as a network in which an
external flow unit enters and exits at specified start and end nodes. The main
input data of the model is an n X n matrix representing the distance d {i, j]
of the arc joining nodes i and j.
Per AMPL syntax, a dot entry in d (i , j] is a placeholder that signifies
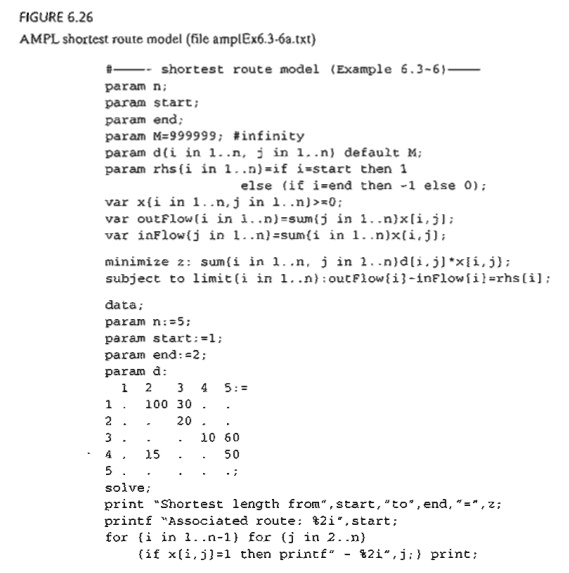
that no
distance is specified for the corresponding arc. In the model, the dot entry is
overridden by the infinite distance M (= 999999)
in param d {i in 1
... n, j in 1 ... n} default M; which will convert it into an infinite-distance
route. The same result could be achieved by replacing the dot entry (.) with
999999 in the data section, which, in addition to "cluttering" the
data, is inconvenient.
The
constraints represent flow conservation through each node:
(Input
flow) - (Output flow) = (External flow)
From x [i, j], we
can define the input and output flow for node i using the statements

The
left-hand side of the constraint i is
thus given as outFlow [i] -inFlow [i].
The
right-hand side of constraint i (external
flow at node i) is defined as

(See
Section A.3 for details of if then
else.) With this statement, specifying start and end nodes automatically
assigns 1, - 1, or 0 to rhs, the right-hand side of the constraints.
The
objective function seeks the minimization of the sum of d [i, j ] * x [i, j ] over all i and j.
In the
present example, start=1 and end=2, meaning that we want to determine the
shortest route from node 1 to node 2. The associated output is

Remarks. The AMPL model as given in
Figure 6.26 has one flaw: The number of active
variables xij is n2 , which could be significantly much
larger than the actual number of (positive-distance) arcs in the network, thus
resulting in a much larger problem. The reason is that the model accounts for
the nonexisting arcs by assigning them an in-finite distance M (= 999999) to guarantee that
they will be zero in the optimum solution. This situation can be remedied by
using a subset of {i in 1 .. n, j in 1 ..
n} that excludes nonexisiting arcs, as the following statement shows:

(See
Section AA for the use of conditions
to define subsets.) The same logic must be applied to the constraints as well
by using the following statements:

File
amplEx6.36b.txt gives the complete model.
PROBLEM 6.3E
1. Modify
solverEx6.3-6.xls to find the shortest route between the following pairs of
nodes:
a. Node 1
to node 5.
b. Node 4
to node 3.
2. Adapt
amplEx6.3-6b.txt for Problem 2, Set 6.3a, to find the shortest route between
node 1 and node 7. The input data must be the raw probabilities. Use AMPL
programming facilities to print/display the optimum transmission route and its
success probability.
Related Topics