Chapter: Psychology: Perception
Form Perception: What Is It?: The Importance of Features
FORM PERCEPTION :WHAT IS IT
The ability to recognize objects
is, of course, enormously important for us. If we couldn’t tell a piece of
bread from a piece of paper, we might try to write on the bread and eat the
paper. If we couldn’t tell the difference between a lamppost and a potential
mate, our social lives would be strange indeed. So how do we manage to
recognize bread, paper, mates, and myriad other objects? In vision, our primary
means of recog-nizing objects is through the perception of their form. Of
course, we sometimes do rely on color (e.g., a violet) and occasionally on size
(e.g., a toy model of an automobile); but in most cases, form is our major
avenue for identifying what we see. The question is how? How do we recognize the forms and patterns we see in the world
around us?
The Importance of Features
One simple hypothesis regarding
our ability to recognize objects is suggested by data. There we saw that the
visual system contains cells that serve as feature
detectors—and so one of these cells might fire if a particular angle is in
view;another might fire if a vertical line is in view; and so on. Perhaps,
therefore, we just need to keep track of which feature detectors are firing in
response to a particular input; that way, we’d have an inventory of the input’s
features, and we could then compare this inventory to some sort of checklist in
memory. Does the inventory tell us that the object in front of our eyes has
four right angles and four straight sides of equal length? If so,then it must
be a square. Does the inventory tell us that the object in view has four legs
and a very long neck? If so, we conclude that we’re looking at a giraffe.
Features do play a central role
in object recognition. If you detect four straight lines on an otherwise blank
field, you’re not likely to decide you’re looking at a circle or a picture of
downtown Chicago; those perceptions don’t fit with the set of features
pre-sented to you by the stimulus. But let’s be clear from the start that there
are some com-plexities here. For starters, consider the enormous variety of
objects we encounter, perceive, and recognize: cats and cars, gardens and
gorillas, shoes and shops; the list goes on and on. Do we have a checklist for
each of these objects? If so, how do we search through this huge set of checklists,
so that we can recognize objects the moment they appear in front of us?
Besides that, for any one of the
objects we can recognize there is still more variety. After all, we recognize
cats when we see them close up or far away, from the front or the side, and
sitting down or walking toward us (Figure 5.1). Do we have a different feature
checklist for each of these views? Or do we somehow have a procedure for
converting these views into some sort of “standardized view,” which we then
compare to a check-list? If so, what might that standardization procedure be?
We clearly need some more theory to address these issues. (For more on how we
might recognize objects despite changes in our view of them, see Tarr, 1995;
Vuong & Tarr, 2004.)
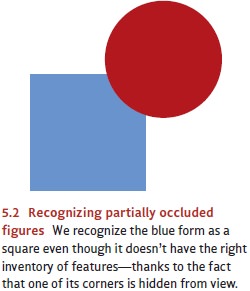
Similarly, we often have partial views of the objects around us;
but we can recognize them anyway. Thus, we recognize a cat even if it’s sitting
behind a tree and we can see only its head and one paw. We recognize a chair
even when someone is sitting on it, blocking much of the chair from view. We
identify the blue form in Figure 5.2 as a square, even though one corner is
hidden. These facts, too, must be accommodated by our theory of recognition.
Related Topics