Chapter: Mechanical : Robotics : Sensors and Machine Vision
Working principle of Range sensors
Working principle of
Range sensors
The distance between the object and the robot hand is measured using the range sensors Within it is range of operation.
The calculation of the distance is by visual processing. Range sensors find use in robot navigation and avoidance of the obstacles in the path.
The - location and the general shape
characteristics of the part in the work envelope ofthe robot S done by special
applications for the range sensors.
There are several approaches like,
triangulation method, structured lighting approach and time-of flight range
finders etc. In these cases the source of illumination can be light-source,
laser beam or based on ultrasonic.
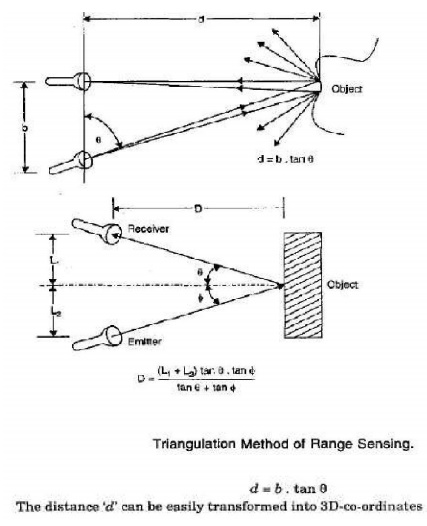
Triangulation
Method:
The
object is swept over by a narrow beam of sharp light.
The
sensor focused on a small spot
of the object surface detects the reflected beam of light.
If ‗8‘is the angle made by the ill source and the
sensor, the dist
Structured Lighting
Approach:
This approach consists of projecting a light pattern
the distortion of the pattern to calculate the range. A pattern in use today is
a sheet of light generated narrow slit.
As illustrated in.
Figure, the intersectio yields a light Stripe which is viewed through a
television camera displaced a distance B from the light source.

The stripe pattern is easily analyzed by a computer
to obtain range information. For example, an inflection indicates a change of
surface, and a break corresponds to a gap between surfaces.
Specific range values are computed by first
calibrating the system. One of the simplest arrangements is shown in Figure,
which represents a top view of Figure.
In this, arrangement, the light source and camera are
placed at the same height, and the sheet of light is perpendicular to the line
joining the origin of the light sheet and the center of the camera lens.
We call the vertical
plane containing this line the reference plane.
Clearly, the reference plane is perpendicular to the
sheet of light, and any vertical flat surface that intersects the sheet will
produce a vertical stripe of light in which every point will have the same
perpendicular distance to the reference plane. –
The objective of the arrangement shown in Figure. is
to position the camera so that every such vertical stripe also appears vertical
in the image plane.
In this way, every point, the same column in the
image will be known to have the same distance to the ‗reference plane.
Related Topics