Chapter: Mechanical : Robotics : Sensors and Machine Vision
Vision systems of Robot
Vision systems of Robot
Machine
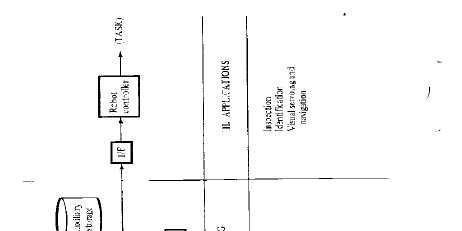
vision system consists of: Lighting, camera, A/D convertor, frame grabber,
computer processor, robot controller and robot manipulator.
The hardware
and software for performing the function of sensing and processing the image
and utilizing the results obtained to command the robot.
The sensing
and digitizing functions involve the input of vision data by means of a camera
focused on the scene of interest. Special lighting techniques are frequently
used to obtain an image of sufficient contrast for later processing.
The image
viewed by the camera is typically digitized and stored in computer memory. The
digital image is called a frame of vision data, and is frequently captured by a
hardware device called a frame grabber.
These devices
are capable of digitizing images at the rate of 30 frames per second. The
frames consist of a matrix of data representing projections of the scene sensed
by the camera.
The elements
of the matrix are called picture elements, or pixels. The number of pixels are
determined by a sampling process per formed on each image frame.
A single
pixel is the projection of a small portion of the scene which reduces that
portion to a single value. The value is a measure of the light intensity for
that element of the scene.
Each pixel
intensity is converted into a digital value. (We are ignoring the additional
complexities involved in the operation of a color video camera.)
The digitized image matrix for each frame is stored
and then subjected to image processing and analysis functions for data
reduction and interpretation of the image.
These steps
are required in order to permit the real-time application of vision analysis
required in robotic applications.
Typically an
image frame will be threshold to produce a binary image, and then various
feature measurements will further reduce the data representation of the image.
This data reduction can change the representation of
a frame from several.
Related Topics