Chapter: Mechanical : Robotics : Sensors and Machine Vision
Slip sensing
Slip
sensing
Humans can grasp an object without information such
as a coefficient of friction or weight. To implement this graspingmotion with
the robot hand, sensors have been proposed that detect an incipient slip within
the contact surface or stick-slip.
Method of slip detection
The sensor is constructed of electrode and pressure
conductive rubber(Inaba Rubber Co., Ltd.) as shown in figure.
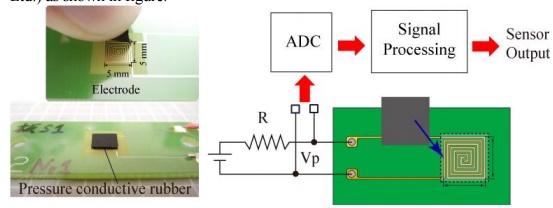
The voltage difference Vp is measured and the signal
processing is performed. Then the initial slip can be detected. The pressure
conductive rubber was a high polymer material primarily composed of silicone
rubber with carbon particles uniformly distributed within.
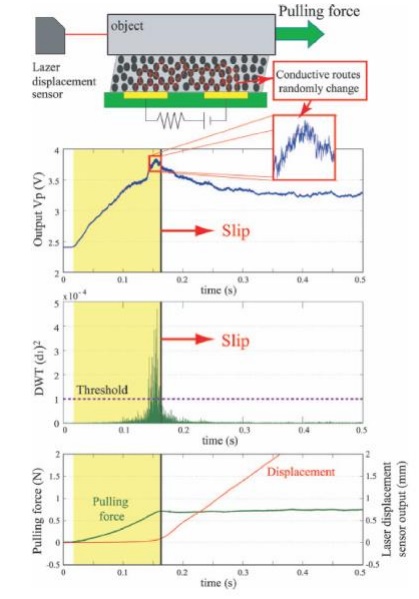
As shown in figure, the
object is placed on the surface of the sensor. The upper graph shows
the output of the
slip sensor when
pulling force is
applied to the
object.
The lowest
graph shows the pulling
force and its position
shifts through slippinge.
First, the pulling force
is increased until about 0.15s, after which it remains roughly constant.
Specifically, it can be considered that a transition from static friction to
dynamic friction occurs at the place marked with a verticalline in the figure.
In an unloaded condition, the electrical resistance
is infinity. However, the electrical resistance changes when the normal force
was added, because the mutual contact between carbon particles increases.
Moreover, when added a tangential force, the electrical resistance randomly
changes by changing the mutual contact between carbon particles.
Here, looking at the enlarged portion of the upper
graph, a complex change in the voltage emerges immediately before the
occurrence of slip (the time of the initial slip). Upon performing a frequency
analysis with respect to this voltage change, it was found that the sensor
output Vp at the time of the initial slip includes a high frequency component
of severalkHztoseveral10kHz.In this regard, such high-frequency change does not
occur when thechangeinforceisinnormaldirection.The slip sensor presented here
extracts this high-frequency component by applying the discrete wavelet
transform (DWT) and detects the initialslipoftheobject.The middle graph
presents the results of DWT power using Haar wavelets. It is clear that
immediately before slip occurs, the DWT power increases.
Frame Grabbers
Hundreds of frame grabbers are on the market to
allow integration of digital and analog machine-vision cameras with host
computers. Varying features make each one unique for a particular application.
When evaluating frame grabbers for a specific application, developers must be
aware of specific camera types (either digital or analog), the sensor types they
use (area or linescan), their systems requirements, and the cost of
peripherals.
Digital Frame Grabbers
To guarantee low latency between image acquisition
and processing, frame grabbers with digital camera interfaces such as Camera
Link cameras are often used, especially
in
high-speed semiconductor applications. The Cam a maximum of 680 Mbytes/s
(64-bit at 85 MHz), currently the highest bandwidth on the market.
High-speed
applications can also benefit from onboard tap reordering that can be
accomplished with many frame grabbers. This removes the burden of recomposing
an entire image from complex multitap cameras (several simultaneous data
channels) from the host computer. Other features, such as the recently
available power-over-Camera Link standard, offer simpler integration (a single
cable for power and data) of compatible Camera Link cameras when this feature
is available on the frame grabber.
Related Topics