Chapter: Compilers : Principles, Techniques, & Tools : Optimizing for Parallelism and Locality
Synchronization Between Parallel Loops
Synchronization Between Parallel Loops
1
A Constant Number of Synchronizations
2
Program-Dependence Graphs
3
Hierarchical Time
4
The Parallelization Algorithm
5
Exercises for Section 11.8
Most programs have no parallelism if we do not allow processors to
perform any synchronizations. But adding even a small constant number of
synchronization operations to a program can expose more parallelism. We shall
first discuss parallelism made possible by a constant number of
synchronizations in this section and the general case, where we embed
synchronization operations in loops, in the next.
1. A Constant Number of Synchronizations
Programs with no synchronization-free parallelism may contain a
sequence of loops, some of which are parallelizable if they are considered
independently. We can parallelize such loops by introducing synchronization
barriers before and after their execution. Example 11.49 illustrates the point.
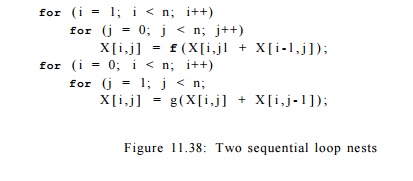
Example 1 1 . 4 9 : In Fig. 11.38 is a program
representative of an ADI (Alter-nating Direction Implicit) integration
algorithm. There is no synchronization-free parallelism. Dependences in the
first loop nest require that each processor works on a column of array X;
however, dependences in the second loop nest require that each processor works
on a row of array X. For there to be no com-munication, the entire array
has to reside on the same processor, hence there is no parallelism. We observe,
however, that both loops are independently parallelizable.
One way to parallelize the code is to have different processors
work on different columns of the array in the first loop, synchronize and wait
for all processors to finish, and then operate on the individual rows. In this
way, all the computation in the algorithm can be parallelized with the
introduction of just one synchronization operation. However, we note that while
only one synchronization is performed, this parallelization requires almost all
the data in matrix X to be transferred between processors. It is possible to
reduce the amount of communication by introducing more synchronizations, which
we shall discuss in Section 11.9.9.
It may appear that this approach is applicable only to programs
consisting of a sequence of loop nests. However, we can create additional
opportunities for the optimization through code transforms. We can apply loop
fission to decompose loops in the original program into several smaller loops,
which can then be parallelized individually by separating them with barriers.
We illustrate this technique with Example 11.50.
Example 1 1 .
5 0 : Consider the following loop:
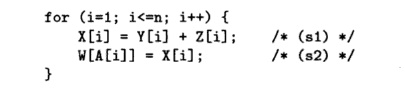
Without knowledge of
the values in array A, we must assume that the access in statement s2 may write to
any of the elements of W. Thus, the instances of S2 must be
executed sequentially in the order they are executed in the original program.
There is no synchronization-free parallelism, and Algorithm 11.43
will sim-ply assign all the computation to the same processor. However, at the
least, instances of statement si can be executed in parallel. We can
parallelize part of this code by having different processors perform difference
instances of state-ment si. Then, in a separate sequential loop, one
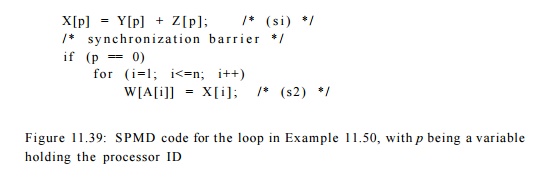
processor, say numbered 0, executes s2, as in the SPMD code shown in Fig. 11.39. •
2.
Program-Dependence Graphs
To find all the parallelism made possible by a constant number of
synchroniza-tions, we can apply fission to the original program greedily. Break
up loops into as many separate loops as possible, and then parallelize each
loop indepen-dently.
To expose all the
opportunities for loop fission, we use the abstraction of a program-dependence
graph (PDG). A program dependence graph of a program
is a graph whose
nodes are the assignment statements of the program and whose edges capture the
data dependences, and the directions of the data dependence, between
statements. An edge from statement si to statement s2 exists
whenever some dynamic instance of s1 shares a data dependence with a later
dynamic instance of s2.
To construct the PDG for a program, we first
find the data dependences between every pair of (not necessarily distinct)
static accesses in every pair of (not necessarily distinct) statements. Suppose
we determine that there is a dependence between access T1 in statement s1 and
access T2 in statement s2. Recall that an instance of a statement is specified
by an index vector i = [hih, • • • ,im] where ik is the loop index of the kth
outermost loop in which the statement is embedded.
1. If there exists a data-dependent pair of
instances, ii of si and i2 of s2, and ii is executed before i2 in the original
program, written ii ^ S l S 2 l2, then there is an edge from s1 to s2.
2. Similarly, if there exists a data-dependent
pair of instances, ii of si and i 2 of s2, and i 2 - < s i s 2 ii> then
there is an edge from s2 to s1.
Note that it is
possible for a data dependence between two statements si and s2 to generate
both an edge from si to s2 and an edge from s2 back to s1.
In the special case where statements si and s2
are not distinct, ii - < S l s 2 i 2 if and only if ii -< i2 (ii is lexicographically
less than i 2 ) . In the general case, si and s2 may be different statements,
possibly belonging to different loop nests.
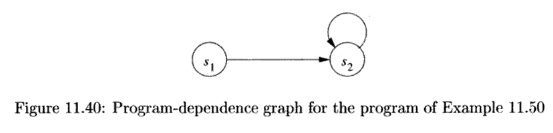
Example 1 1 . 5 1 :
For the program of Example 11.50, there are no dependences among the instances
of statement s1. However, the z'th instance of statement s2 must follow the ith
instance of statement 81. Worse, since the reference Wp4[i]] may write any
element of array W, the ith instance of s2 depends on all previous instances of
s2. That is, statement s2 depends on itself. The PDG for the program of Example
11.50 is shown in Fig. 11.40. Note that there is one cycle in the graph,
containing s2 only.
The
program-dependence graph makes it easy to determine if we can split statements
in a loop. Statements connected in a cycle in a PDG cannot be
split. If si —y s2 is a
dependence between two statements in a cycle, then some instance of si must
execute before some instance of s2, and vice versa. Note that this mutual dependence occurs only if
si and s2 are embedded in some common loop. Because of the
mutual dependence, we cannot execute all instances of one statement before the
other, and therefore loop fission is not allowed. On the other hand, if the
dependence s± s2 is unidirectional, we can split up the loop and
execute all the instances of si first, then those of s2.
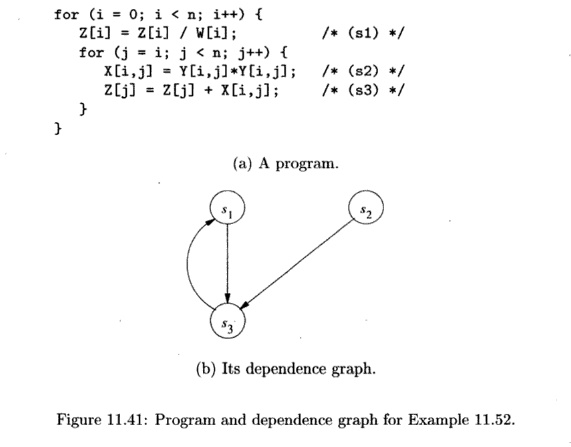
Example 1 1 . 5 2 :
Figure 11.41(b) shows the
program-dependence graph for the program o f Fig. 11.41(a). Statements s ± and 5 3 belong t o a cycle in
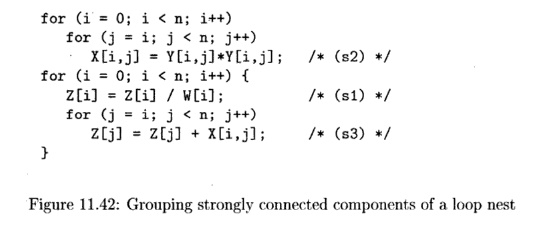
the graph and therefore cannot be placed in separate loops. We can, however,
split statement s2 out and execute all its instances before
executing the rest of the computation, as in Fig. 11.42. The first loop is
parallelizable, but the second is not. We can parallelize the first loop by
placing barriers before and after its parallel execution.
3. Hierarchical Time
While the relation -
< S l S 2 can be very hard to compute in general, there is
a family of programs to which the optimizations of this section are commonly
applied, and for which there is a straightforward way to compute dependencies.
Assume that the program is block structured, consisting of loops and simple
arithmetic operations and no other control constructs. A statement in the program
is either an assignment statement, a sequence of statements, or a loop
construct whose body is a statement. The control structure thus represents a
hierarchy. At the top of the hierarchy is the node representing the statement
of the whole program. An assignment statement is a leaf node. If a statement is
a sequence, then its children are the statements within the sequence, laid out
from left to right according to their lexical order. If a statement is a loop,
then its children are the components of the loop body, which is typically a
sequence of one or more statements.
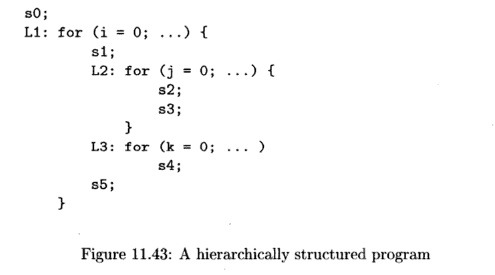
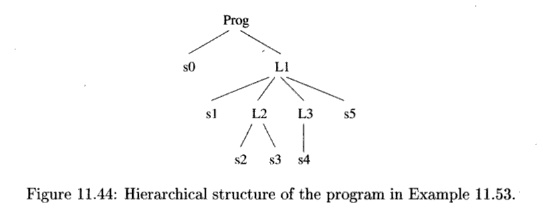
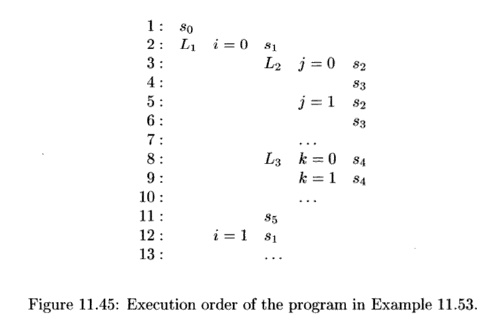
Example 1 1 . 5 3 :
The hierarchical structure of the program in Fig. 11.43 is shown in Fig. 11.44.
The hierarchical nature of the execution sequence is high lighted in Fig.
11.45. The single instance of s0 precedes all other operations, because it is the
first statement executed. Next, we execute all instructions from the first
iteration of the outer loop before those in the second iteration and so forth.
For all dynamic instances whose loop index i has value 0, the statements
si, L2, L3, and s5 are executed in lexical order. We can repeat the
same argument to generate the rest of the execution order.
We can resolve the
ordering of two instances from two different statements in a hierarchical
manner. If the statements share common loops, we compare the values of their
common loop indexes, starting with the outermost loop. As soon as we find a
difference between their index values, the difference determines the ordering.
Only if the index values for the outer loops are the same do we need to compare
the indexes of the next inner loop. This process is analogous to how we would
compare time expressed in terms of hours, minutes and seconds. To compare two times,
we first compare the hours, and only if they refer to the same hour would we
compare the minutes and so forth. If the index values are the same for all
common loops, then we resolve the order based on their relative lexical
placement. Thus, the execution order for the simple nested-loop programs we
have been discussing is often referred to as
"hierarchical time." Let si
be a statement nested in a di-deep loop, and s2 in a d2 -deep loop,
A PDG edge from si to s2 exists as long as the data-dependence condition
and one of the disjunctive clauses can be made true simultaneously. Thus, we
may need to solve up to d or d + 1 linear integer
programs, depending on whether si appears lexically before s2, to determine
the existence of one edge.
4. The Parallelization Algorithm
We now present a simple algorithm that first splits up the
computation into as many different loops as possible, then parallelizes them
independently.
Algorithm 11 . 5 4 : Maximize the degree of parallelism
allowed by 0(1) syn-chronizations.
INPUT: A program with array accesses.
OUTPUT: SPMD code with a constant number of
synchronization barriers.
METHOD:
1.
Construct the
program-dependence graph and partition the statements into strongly connected
components (SCC's). Recall from Section 10.5.8 that a strongly connected
component is a maximal subgraph of the orig-inal whose every node in the
subgraph can reach every other node.
2.
Transform the
code to execute SCC's in a topological order by applying fission if necessary.
3.
Apply Algorithm
11.43 to each SCC to find all of its synchronization-free parallelism. Barriers
are inserted before and after each parallelized SCC.
While Algorithm 11.54 finds all degrees of parallelism with 0(1) synchro-nizations, it has a number of weaknesses. First, it may
introduce unnecessary synchronizations. As a matter of fact, if we apply this
algorithm to a program that can be parallelized without synchronization, the
algorithm will parallelize each statement independently and introduce a synchronization
barrier between the parallel loops executing each statement. Second, while
there may only be a constant number of synchronizations, the parallelization
scheme may transfer a lot of data among processors with each synchronization.
In some cases, the cost of communication makes the parallelism too expensive,
and we may even be better off executing the program sequentially on a
uniprocessor. In the fol-lowing sections, we shall next take up ways to
increase data locality, and thus reduce the amount of communication.
5. Exercises for Section 11.8
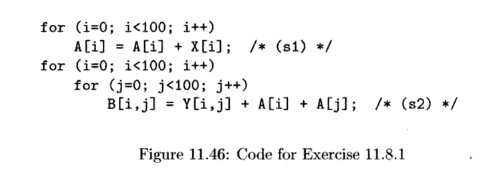
Exercise 11.8.1: Apply Algorithm 11.54 to the code of Fig. 11.46.
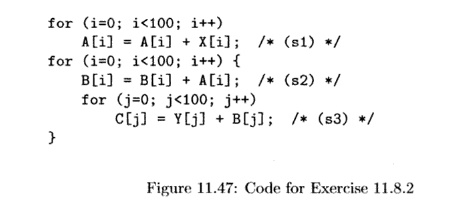
Exercise 1 1 . 8 . 2 : Apply Algorithm 11.54 to the code of Fig. 11.47.
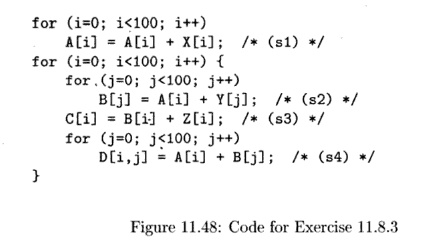
Exercise 11.8.3: Apply Algorithm 11.54 to the code of Fig. 11.48.
Related Topics